Вам также может понравиться
- 2009 UMB A Real-Time Freehand Ultrasound Calibration System With Automatic Accuracy Feedback and Control-EditДокумент15 страниц2009 UMB A Real-Time Freehand Ultrasound Calibration System With Automatic Accuracy Feedback and Control-Editعامر العليОценок пока нет
- Real-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)От EverandReal-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)Оценок пока нет
- 2014-2D3D Multimodality Evaluation of Thyroid lobes-UMB-FreesmeyerДокумент10 страниц2014-2D3D Multimodality Evaluation of Thyroid lobes-UMB-FreesmeyerAsim AliОценок пока нет
- Original Contribution: Performance of Ultrasound Echo Decomposition Using Singular Spectrum AnalysisДокумент8 страницOriginal Contribution: Performance of Ultrasound Echo Decomposition Using Singular Spectrum Analysismoonrise1985Оценок пока нет
- Cardiac Electrophysiology Without FluoroscopyОт EverandCardiac Electrophysiology Without FluoroscopyRiccardo ProiettiОценок пока нет
- 10 1 1 400 6229 PDFДокумент29 страниц10 1 1 400 6229 PDFYanquiel Mansfarroll GonzalezОценок пока нет
- Industrial X-Ray Computed TomographyОт EverandIndustrial X-Ray Computed TomographySimone CarmignatoОценок пока нет
- 2D Versus 3D Kinematic Horse Trot Miró 2009Документ7 страниц2D Versus 3D Kinematic Horse Trot Miró 2009Fernanda GodoiОценок пока нет
- Theoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlОт EverandTheoretical method to increase the speed of continuous mapping in a three-dimensional laser scanning system using servomotors controlОценок пока нет
- The Relationship of Static Foot Structure To Dynamic Foot FunctionДокумент8 страницThe Relationship of Static Foot Structure To Dynamic Foot FunctionminasОценок пока нет
- Temporal Bone Imaging: Comparison of Flat Panel Volume CT and Multisection CTДокумент6 страницTemporal Bone Imaging: Comparison of Flat Panel Volume CT and Multisection CTNovi DwiyantiОценок пока нет
- Registering Preprocedure Volumetric Images With Intraprocedure 3-D Ultrasound Using An Ultrasound Imaging ModelДокумент14 страницRegistering Preprocedure Volumetric Images With Intraprocedure 3-D Ultrasound Using An Ultrasound Imaging ModelBoopathi RОценок пока нет
- A Study and Optimization of Lumbar Spine X-Ray ImagingДокумент12 страницA Study and Optimization of Lumbar Spine X-Ray ImagingMatt ParkmanОценок пока нет
- Review Bio Medical ImagingДокумент23 страницыReview Bio Medical ImagingSweta TripathiОценок пока нет
- Measuring The Distance of Vegetation From Powerlines Using Stereo VisionДокумент15 страницMeasuring The Distance of Vegetation From Powerlines Using Stereo VisionFaizal Ibnu AdrianОценок пока нет
- Robotic Arm Based Automatic Ultrasound Scanning For Three-Dimensional ImagingДокумент10 страницRobotic Arm Based Automatic Ultrasound Scanning For Three-Dimensional ImagingAshish Presanna ChandranОценок пока нет
- De Oliveira 2021 J. Phys. Conf. Ser. 1826 012085Документ8 страницDe Oliveira 2021 J. Phys. Conf. Ser. 1826 012085Johnny Joe AguilarОценок пока нет
- 2017 Freehand 3-D Ultrasound Imaging A Systematic ReviewДокумент26 страниц2017 Freehand 3-D Ultrasound Imaging A Systematic Reviewعامر العليОценок пока нет
- Application of A Photogrammetric Technique To A Model TunnelДокумент17 страницApplication of A Photogrammetric Technique To A Model TunnelJaysing ChoudhariОценок пока нет
- Validation of Radiocarpal Joint Contact Models Based On Images From A Clinical MRI ScannerДокумент1 страницаValidation of Radiocarpal Joint Contact Models Based On Images From A Clinical MRI ScannerHarshoi KrishannaОценок пока нет
- NGA-West2 Database: A) B) C) C) B) D) E) F) G) F) H) I)Документ17 страницNGA-West2 Database: A) B) C) C) B) D) E) F) G) F) H) I)Luis Fernando Vergaray AstupiñaОценок пока нет
- Rahayuddin 2019 J. Phys. Conf. Ser. 1341 082030Документ7 страницRahayuddin 2019 J. Phys. Conf. Ser. 1341 082030Saikat NandyОценок пока нет
- Self Calibration of Small and Medium Format Digital CamerasДокумент6 страницSelf Calibration of Small and Medium Format Digital CamerasOke Joko HaniloОценок пока нет
- So Lonche 1977Документ2 страницыSo Lonche 1977Ravudai JabbalОценок пока нет
- T2 NanthagopalДокумент10 страницT2 NanthagopalbelajartvkuОценок пока нет
- Smart BracketsДокумент6 страницSmart BracketslahyouhОценок пока нет
- 2107 05998 PDFДокумент7 страниц2107 05998 PDFFarhan AliОценок пока нет
- Clinical Application of EIT System For Static Imaging of ThoraxДокумент13 страницClinical Application of EIT System For Static Imaging of ThoraxserajserajОценок пока нет
- Chander Et Al 2009Документ11 страницChander Et Al 2009Ricardo NevesОценок пока нет
- NIH Public Access: Author ManuscriptДокумент16 страницNIH Public Access: Author ManuscriptMadhu MidhaОценок пока нет
- Computed Tomography MachineДокумент24 страницыComputed Tomography MachineGaurav Molankar100% (1)
- Quantitative Comparison of Algorithms For Tracking Single Fluorescent ParticlesДокумент11 страницQuantitative Comparison of Algorithms For Tracking Single Fluorescent Particles0106062007Оценок пока нет
- Radiologic Clinics of North America Body MR Imaging, Volume 41 Number 1 2003Документ193 страницыRadiologic Clinics of North America Body MR Imaging, Volume 41 Number 1 2003pepsimax85Оценок пока нет
- Two-Versus Three-Dimensional Imaging in Subjects With Unerupted Maxillary CaninesДокумент6 страницTwo-Versus Three-Dimensional Imaging in Subjects With Unerupted Maxillary CaninesAkram AlsharaeeОценок пока нет
- PDFДокумент24 страницыPDFegomez63Оценок пока нет
- DICOM CT PD User Manual - v12Документ10 страницDICOM CT PD User Manual - v12Shahbaz AhmedОценок пока нет
- T2 NanthagopalДокумент10 страницT2 Nanthagopaladin80Оценок пока нет
- XДокумент6 страницXShelaErlanggaPutriОценок пока нет
- Design and Evaluation of A New Three-DimДокумент2 страницыDesign and Evaluation of A New Three-DimAlexandre SousaОценок пока нет
- Remote SensingДокумент15 страницRemote Sensingjayaprakash_bojjaОценок пока нет
- Modal Based Damage Detection Using ANNДокумент8 страницModal Based Damage Detection Using ANNSri NОценок пока нет
- Euroblastoma: ASE TudyДокумент4 страницыEuroblastoma: ASE TudyOmkar KongariОценок пока нет
- Li 2004Документ6 страницLi 2004Melanie DascăluОценок пока нет
- A Stereo Piv System For Measuring The Velocity Vector in Complex Gas FlowsДокумент6 страницA Stereo Piv System For Measuring The Velocity Vector in Complex Gas FlowsYan JiangОценок пока нет
- Establishing Orbital Floor Symmetry To Support Mirror Imaging in Computer-Aided Reconstruction of The Orbital FloorДокумент3 страницыEstablishing Orbital Floor Symmetry To Support Mirror Imaging in Computer-Aided Reconstruction of The Orbital FloorМихаил КуликовОценок пока нет
- Segmentation of Brain Structures in Presence of A Space-Occupying LesionДокумент7 страницSegmentation of Brain Structures in Presence of A Space-Occupying LesionzuhirdaОценок пока нет
- 3 CT SCAN Tm-1aДокумент28 страниц3 CT SCAN Tm-1aMayОценок пока нет
- RRP Sample PaperДокумент3 страницыRRP Sample PaperAna SpataruОценок пока нет
- Novel Geometries For Stereotactic LocalizersДокумент7 страницNovel Geometries For Stereotactic LocalizersT.U. Pai João da Caridade & Caboclo FlechasОценок пока нет
- Karnan and LogeswariДокумент9 страницKarnan and LogeswariPrasanna ThiОценок пока нет
- Thesis 1392349859Документ16 страницThesis 1392349859ROHIT ARORAОценок пока нет
- Preprocessing & Registration: Frithjof Kruggel, M.DДокумент20 страницPreprocessing & Registration: Frithjof Kruggel, M.Dpopstick2000Оценок пока нет
- X RaysДокумент3 страницыX RaysBangle ChОценок пока нет
- 3D Eco Tehnici de ScanareДокумент33 страницы3D Eco Tehnici de Scanarescuby660Оценок пока нет
- Summary of Current Radiometric Calibration - ChanderДокумент24 страницыSummary of Current Radiometric Calibration - ChanderJoseLuisJuanMarcoОценок пока нет
- The Technology of MRI - The Next 10 Years?: Hounsfield Review SeriesДокумент17 страницThe Technology of MRI - The Next 10 Years?: Hounsfield Review SeriesMarcus OliveiraОценок пока нет
- M Easuring Running Speed Using Photocells: M .R. Yeado N, T. Kato and D.G. Kerw inДокумент9 страницM Easuring Running Speed Using Photocells: M .R. Yeado N, T. Kato and D.G. Kerw inEveraldo JúniorОценок пока нет
- Orthodontic Soft-Tissue Parameters: A Comparison of Cone-Beam Computed Tomography and The 3dMD Imaging SystemДокумент10 страницOrthodontic Soft-Tissue Parameters: A Comparison of Cone-Beam Computed Tomography and The 3dMD Imaging Systemosama-alaliОценок пока нет
- 2018 Deep Learning-Based 3D Freehand UltrasoundДокумент3 страницы2018 Deep Learning-Based 3D Freehand Ultrasoundعامر العليОценок пока нет
- 2017 Freehand 3-D Ultrasound Imaging A Systematic ReviewДокумент26 страниц2017 Freehand 3-D Ultrasound Imaging A Systematic Reviewعامر العليОценок пока нет
- 2018 3D Freehand Ultrasound Without External Tracking Using DeepДокумент53 страницы2018 3D Freehand Ultrasound Without External Tracking Using Deepعامر العليОценок пока нет
- Spatial Compounding 2Документ14 страницSpatial Compounding 2عامر العليОценок пока нет
- A Freehand 3D Ultrasound Imaging System Using Open Source Software Tools With Improved Edge Preserving InterpolationДокумент19 страницA Freehand 3D Ultrasound Imaging System Using Open Source Software Tools With Improved Edge Preserving Interpolationعامر العليОценок пока нет
- Spatial Compounding 2Документ14 страницSpatial Compounding 2عامر العليОценок пока нет
- A Rapid Calibration Method For Registration and 3D Tracking of Ultrasound Images Using Spatial LocalizerДокумент12 страницA Rapid Calibration Method For Registration and 3D Tracking of Ultrasound Images Using Spatial Localizerعامر العليОценок пока нет
- 172 PaperДокумент5 страниц172 Paperعامر العليОценок пока нет
- The Unofficial Aterlife GuideДокумент33 страницыThe Unofficial Aterlife GuideIsrael Teixeira de AndradeОценок пока нет
- Mullā Ṣadrā and Causation - Rethinking A Problem in Later Islamic Philosophy AuthorДокумент15 страницMullā Ṣadrā and Causation - Rethinking A Problem in Later Islamic Philosophy AuthorKadag LhundrupОценок пока нет
- Apcotide 1000 pc2782Документ1 страницаApcotide 1000 pc2782hellmanyaОценок пока нет
- Chapter 1 (PLC)Документ9 страницChapter 1 (PLC)Kibria PrangonОценок пока нет
- Contact Inform 2002 PDFДокумент24 страницыContact Inform 2002 PDFFrank AlmeidaОценок пока нет
- Unit 2 - Presentations (Image, Impact and Making An Impression) 2Документ25 страницUnit 2 - Presentations (Image, Impact and Making An Impression) 2LK Chiarra Panaligan100% (1)
- Exercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresДокумент14 страницExercise 9 Two Factor Factorial Experiments and Derivation of Expected Mean SquaresHasmaye PintoОценок пока нет
- Active Faults in MalaysiaДокумент52 страницыActive Faults in MalaysiaHazim HaОценок пока нет
- SR6 Core Rulebook Errata Feb 2020Документ6 страницSR6 Core Rulebook Errata Feb 2020yrtalienОценок пока нет
- Zest O CorporationДокумент21 страницаZest O CorporationJhamane Chan53% (15)
- Pythagorean Theorem WorksheetДокумент11 страницPythagorean Theorem WorksheetJames ChanОценок пока нет
- E-OLSS: Electronic ControlДокумент12 страницE-OLSS: Electronic ControlSamidiОценок пока нет
- Factors Affecting Physical FitnessДокумент7 страницFactors Affecting Physical FitnessMary Joy Escanillas Gallardo100% (2)
- YellowstoneДокумент1 страницаYellowstoneOana GalbenuОценок пока нет
- iPQ-Center Webvideo Star TTB MA R1 42 en PDFДокумент32 страницыiPQ-Center Webvideo Star TTB MA R1 42 en PDFHamid KharazmiОценок пока нет
- Armor MagazineДокумент32 страницыArmor Magazine"Rufus"100% (1)
- History of Flash Part - 2Документ7 страницHistory of Flash Part - 2YOGESHWER NATH SINGHОценок пока нет
- Crashing Is A Schedule Compression Technique Used To Reduce or Shorten The Project ScheduleДокумент1 страницаCrashing Is A Schedule Compression Technique Used To Reduce or Shorten The Project ScheduleRaymart BulagsacОценок пока нет
- 412 X 7 Va CJ CSДокумент1 страница412 X 7 Va CJ CSRajesh KumarОценок пока нет
- RMHE08Документ2 112 страницRMHE08Elizde GómezОценок пока нет
- SSCNC Turning Tutorial ModДокумент18 страницSSCNC Turning Tutorial ModYudho Parwoto Hadi100% (1)
- Ask A Monk EnlightenmentДокумент16 страницAsk A Monk EnlightenmentPetruoka EdmundasОценок пока нет
- Communication Guide: For Vita 62 Compliant VPX Power SuppliesДокумент8 страницCommunication Guide: For Vita 62 Compliant VPX Power Suppliesk.saikumarОценок пока нет
- Uji Efektivitas Mikroba Rumpun BambuДокумент7 страницUji Efektivitas Mikroba Rumpun BambuUse Real ProjectОценок пока нет
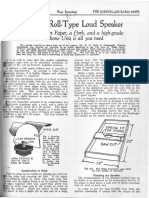
- Simple Roll-Type: A Loud SpeakerДокумент1 страницаSimple Roll-Type: A Loud SpeakerEudes SilvaОценок пока нет
- Texto CuritibaДокумент1 страницаTexto CuritibaMargarida GuimaraesОценок пока нет
- 04 SAMSS 005 Check ValvesДокумент9 страниц04 SAMSS 005 Check ValvesShino UlahannanОценок пока нет
- Generative Shape DesignДокумент195 страницGenerative Shape DesignAdi Fiera100% (1)
- Superposition and Statically Indetermina - GDLCДокумент25 страницSuperposition and Statically Indetermina - GDLCAnonymous frFFmeОценок пока нет
- Future AncestorsДокумент44 страницыFuture AncestorsAlex100% (1)
- ParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)От EverandParaPro Assessment Preparation 2023-2024: Study Guide with 300 Practice Questions and Answers for the ETS Praxis Test (Paraprofessional Exam Prep)Оценок пока нет
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeОт EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeРейтинг: 4 из 5 звезд4/5 (2)
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.От EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Рейтинг: 5 из 5 звезд5/5 (1)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsОт EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsРейтинг: 4.5 из 5 звезд4.5/5 (3)
- Images of Mathematics Viewed Through Number, Algebra, and GeometryОт EverandImages of Mathematics Viewed Through Number, Algebra, and GeometryОценок пока нет
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingОт EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingРейтинг: 4.5 из 5 звезд4.5/5 (21)
- Calculus Workbook For Dummies with Online PracticeОт EverandCalculus Workbook For Dummies with Online PracticeРейтинг: 3.5 из 5 звезд3.5/5 (8)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldОт EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldРейтинг: 3 из 5 звезд3/5 (79)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)От EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Оценок пока нет
- Who Tells the Truth?: Collection of Logical Puzzles to Make You ThinkОт EverandWho Tells the Truth?: Collection of Logical Puzzles to Make You ThinkРейтинг: 5 из 5 звезд5/5 (1)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsОт EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsРейтинг: 3.5 из 5 звезд3.5/5 (9)
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathОт EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathРейтинг: 5 из 5 звезд5/5 (1)
- Transform Your 6-12 Math Class: Digital Age Tools to Spark LearningОт EverandTransform Your 6-12 Math Class: Digital Age Tools to Spark LearningОценок пока нет
- Magic Multiplication: Discover the Ultimate Formula for Fast MultiplicationОт EverandMagic Multiplication: Discover the Ultimate Formula for Fast MultiplicationОценок пока нет