Вам также может понравиться
- Tecnicas de MicrofoneoДокумент22 страницыTecnicas de Microfoneopancarmo5449100% (4)
- Encendido ConvencionДокумент97 страницEncendido ConvencionPablo Andres Rimmelin MarchantОценок пока нет
- TOLVASДокумент55 страницTOLVASmarco corpus100% (1)
- Momento AngularДокумент14 страницMomento AngularJohn G.Оценок пока нет
- Simba M4-CДокумент15 страницSimba M4-CRD Gian100% (1)
- 1GD InyectorДокумент7 страниц1GD InyectorKevin TtitoОценок пока нет
- Guia de Laboratorio de GiroscopioДокумент10 страницGuia de Laboratorio de GiroscopioNotlim Otrebla Ollis AzolañepОценок пока нет
- DilanДокумент9 страницDilanMichell GomezОценок пока нет
- Informe N.07 (Codena - Rosero) (Momento de Inercia y Aceleración Angular)Документ10 страницInforme N.07 (Codena - Rosero) (Momento de Inercia y Aceleración Angular)Douglas Fernando Gonzales HerediaОценок пока нет
- Movimiento de RotaciónДокумент13 страницMovimiento de RotaciónMelissa GarzaОценок пока нет
- Informe RodadurasДокумент7 страницInforme RodadurasJulián SantiagoОценок пока нет
- Movimiento de RotaciónДокумент44 страницыMovimiento de RotaciónEvelyn LecoñaОценок пока нет
- Efecto GiroscopicoДокумент6 страницEfecto GiroscopicoPacoОценок пока нет
- Informe 7Документ7 страницInforme 7Bryshet VelasquezОценок пока нет
- GiroscopioДокумент10 страницGiroscopioNicole KarelisОценок пока нет
- Cinematica Del Cuerpo Rigido en Un Espacio TridimensionalДокумент16 страницCinematica Del Cuerpo Rigido en Un Espacio Tridimensionaljose joseОценок пока нет
- La cinemática (del griego κινέιν kinéin 'moverДокумент9 страницLa cinemática (del griego κινέιν kinéin 'moverÂndy GarcîaОценок пока нет
- Movimiento Alrededor de Un Punto FijoДокумент9 страницMovimiento Alrededor de Un Punto FijoAngelSanchezОценок пока нет
- Ecuaciones de Movimiento 1Документ14 страницEcuaciones de Movimiento 1Luis Huaman QuispeОценок пока нет
- RODADURAДокумент6 страницRODADURAJuan Sebastián Aponte GonzálezОценок пока нет
- Efecto GiroscopioДокумент4 страницыEfecto GiroscopioCristian Pillacela100% (1)
- Tarea5 AnalisisSintesisMecanismosДокумент5 страницTarea5 AnalisisSintesisMecanismosNELSY ARLINE ARREDONDO RAMIREZОценок пока нет
- Elipsoide de PoinsotДокумент11 страницElipsoide de Poinsotgustavo salazarОценок пока нет
- Segunda Visita 2Документ4 страницыSegunda Visita 2JoseLuisRodriguezMirandaОценок пока нет
- Informe 7 Momento de Inercia UTPДокумент17 страницInforme 7 Momento de Inercia UTPAlexander Moran100% (1)
- Informe 7 Momento de Inercia UTPДокумент17 страницInforme 7 Momento de Inercia UTPE. R. Reinoso Núñez83% (6)
- Reporte Practica #5Документ8 страницReporte Practica #5Gabriel Pinal MartinezОценок пока нет
- Trabajo de Invesigacion GiroscopioДокумент15 страницTrabajo de Invesigacion GiroscopioCarlos GarciaОценок пока нет
- Velocidad AngularДокумент17 страницVelocidad AngularSantiago GonzalesОценок пока нет
- Informe 5 DinamicaДокумент6 страницInforme 5 DinamicaJoel S SanchezОценок пока нет
- Ejercicios M ClasicaДокумент45 страницEjercicios M ClasicadeaОценок пока нет
- Trabajo DinamicaДокумент24 страницыTrabajo DinamicajuanreyhuancaОценок пока нет
- Grupo N°1 Tarea 02Документ16 страницGrupo N°1 Tarea 02Vero KarОценок пока нет
- Diapositivas DinámicaДокумент75 страницDiapositivas DinámicaEnriquez IvanОценок пока нет
- Familia de PalabrasДокумент21 страницаFamilia de PalabrasGladys RovaluОценок пока нет
- Informe 5 DinamicaДокумент6 страницInforme 5 DinamicaJoel S SanchezОценок пока нет
- Servomecanismos Segundo CorteДокумент3 страницыServomecanismos Segundo CorteoscarОценок пока нет
- Guia5 1 PDFДокумент20 страницGuia5 1 PDFJoiseth Flores SforzaОценок пока нет
- Dinámica ExpoДокумент15 страницDinámica ExpoDae Hyun KimОценок пока нет
- Trabajo DinamicaДокумент26 страницTrabajo DinamicajuanreyhuancaОценок пока нет
- Informe de Laboratorio 4Документ6 страницInforme de Laboratorio 4Gianmarco CAОценок пока нет
- Unidad 4 DinamicaДокумент20 страницUnidad 4 DinamicaAdrian GuerraОценок пока нет
- Ejercicios Tema 3Документ24 страницыEjercicios Tema 3Tristan Villanueva CoutiñoОценок пока нет
- Rotacion Alrededor de Un Eje FijoДокумент27 страницRotacion Alrededor de Un Eje FijoRaúl ChávezОценок пока нет
- Informe Momento de InerciaДокумент7 страницInforme Momento de InerciaMateoTapiaAguirreОценок пока нет
- Lab#7 Fisica IДокумент14 страницLab#7 Fisica IJoao CruzОценок пока нет
- Informe Momento-de-Inercia IIДокумент16 страницInforme Momento-de-Inercia IIHuberDíazОценок пока нет
- CAPITULO #3 Movimiento RotacionalДокумент10 страницCAPITULO #3 Movimiento RotacionalMaria Jose PerezОценок пока нет
- Info Fisica TorsionДокумент4 страницыInfo Fisica TorsionLINA MARIA DIAZ PAEZОценок пока нет
- Centro y Eje Instantáneo de RotaciónДокумент17 страницCentro y Eje Instantáneo de RotaciónEmelinОценок пока нет
- Nuevo Documento de Microsoft WordДокумент16 страницNuevo Documento de Microsoft WordLuisMiguelYraholaОценок пока нет
- Análisis y Comprensión de Materiales BibliográficosДокумент11 страницAnálisis y Comprensión de Materiales BibliográficosRoberth David Pinoargote ZambranoОценок пока нет
- Movimiento de Un GiróscopoДокумент6 страницMovimiento de Un GiróscopoDennis Minchán ChОценок пока нет
- Labo 4 Ver.04 FinalДокумент17 страницLabo 4 Ver.04 FinalLuis HuarhuaОценок пока нет
- LAB. Pendulo de TorsionДокумент12 страницLAB. Pendulo de TorsionJose Carlos Macea100% (2)
- MovimientoДокумент10 страницMovimientojohn D. Salazar0% (1)
- Pendulo FisicoДокумент5 страницPendulo FisicoYonatan MorenoОценок пока нет
- Rotación Alrededor de Un Eje FijoДокумент10 страницRotación Alrededor de Un Eje FijoMassiel De ÓleoОценок пока нет
- Practica No 1Документ19 страницPractica No 1SANTIAGO SANTANA GONZALEZОценок пока нет
- Jose Alvarez - PPSXДокумент22 страницыJose Alvarez - PPSXManuelОценок пока нет
- Perspectiva curvilínea: Explorando la percepción de profundidad en la visión por computadoraОт EverandPerspectiva curvilínea: Explorando la percepción de profundidad en la visión por computadoraОценок пока нет
- Momentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraОт EverandMomentos de velocidad: Capturando la dinámica: conocimientos sobre la visión por computadoraОценок пока нет
- Lopez Claure Andres - Informe de Practicas 3Документ10 страницLopez Claure Andres - Informe de Practicas 3Andres LopezОценок пока нет
- Lopez Claure Andres - Informe de Practicas 2Документ11 страницLopez Claure Andres - Informe de Practicas 2Andres LopezОценок пока нет
- AutomatizacionДокумент38 страницAutomatizacionAndres LopezОценок пока нет
- Lopez Claure Andres - Informe de Practicas 1Документ8 страницLopez Claure Andres - Informe de Practicas 1Andres LopezОценок пока нет
- Marco TeoricoДокумент12 страницMarco TeoricoAndres LopezОценок пока нет
- 2do. Control PrácticoДокумент1 страница2do. Control PrácticoAndres LopezОценок пока нет
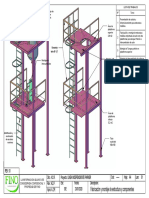
- Estructura Metalica Pulmon - PARKER - 01Документ1 страницаEstructura Metalica Pulmon - PARKER - 01Andres LopezОценок пока нет
- Unidad 5Документ91 страницаUnidad 5Andres LopezОценок пока нет
- CoronaДокумент1 страницаCoronaAndres LopezОценок пока нет
- Puerta DobleДокумент3 страницыPuerta DobleJORGEALEXERОценок пока нет
- Actividad Fundamental 3.Документ9 страницActividad Fundamental 3.ALEJANDRO LUNAОценок пока нет
- Embrague Automático Hidrodinámico.Документ40 страницEmbrague Automático Hidrodinámico.Anthony DaríoОценок пока нет
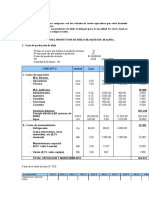
- Costos Operativos Del Productor de HieloДокумент2 страницыCostos Operativos Del Productor de HieloJohn NeciosupОценок пока нет
- LAB PRACTICA 5 Resorte EspiralДокумент7 страницLAB PRACTICA 5 Resorte EspiralAnyelo Rubens Torres MontillasОценок пока нет
- Diseño de Formulación de Gránulos Preparados Por Método de Granulación Húmeda Utilizando Una Prensa de Tabletas de Un Solo Golpe Multifuncional para Evitar Fallas en La Formación de TabletasДокумент5 страницDiseño de Formulación de Gránulos Preparados Por Método de Granulación Húmeda Utilizando Una Prensa de Tabletas de Un Solo Golpe Multifuncional para Evitar Fallas en La Formación de TabletasVanessa Chávez de la CruzОценок пока нет
- Evaluacion #1 Laboratorio de Redes ElectricasДокумент11 страницEvaluacion #1 Laboratorio de Redes ElectricasFrancesco De SpiritoОценок пока нет
- Mecanizacion AgricolaДокумент16 страницMecanizacion AgricolaCARMEN LINDA SUAREZОценок пока нет
- Equipo de Presion CaudalДокумент24 страницыEquipo de Presion CaudalCamilo Alejandro Cubillos TrujilloОценок пока нет
- Experimento Agua Que No CaeДокумент1 страницаExperimento Agua Que No CaeElisa Cruz Carvajal100% (1)
- 09 Formulario INEДокумент6 страниц09 Formulario INEFelipe Silva MuñozОценок пока нет
- Dypro SAP Examen Captura C - TSCM52!66!2 - Parte1Документ5 страницDypro SAP Examen Captura C - TSCM52!66!2 - Parte1Carlos BastidasОценок пока нет
- 2019-1 Separata #06 El InformeДокумент3 страницы2019-1 Separata #06 El Informejesus castilloОценок пока нет
- Cimentacciones de Trabla A EstacaДокумент8 страницCimentacciones de Trabla A Estacadiasum123Оценок пока нет
- Hoja Membretada Ing. Ivan CcayasccaДокумент2 страницыHoja Membretada Ing. Ivan CcayasccaYordan BohorquezОценок пока нет
- Mandos NeumáticosДокумент3 страницыMandos Neumáticoscristian morales50% (2)
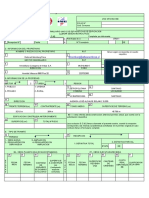
- Formato - Permiso Trabajo en Altura - Ingenia - 2023Документ1 страницаFormato - Permiso Trabajo en Altura - Ingenia - 2023jon levisОценок пока нет
- Bloque ViajeroДокумент3 страницыBloque ViajeroCristian Ortiz SalazarОценок пока нет
- Inf Trabajo FinalДокумент2 страницыInf Trabajo Finalapi-3696901Оценок пока нет
- Manual de Gleason AndamiosДокумент7 страницManual de Gleason AndamiosNatalia Salazar100% (1)
- Walter Pater - El-RenacimientoДокумент7 страницWalter Pater - El-RenacimientoantonioОценок пока нет
- Accesorios de Ayuda Al Paciente EncamadoДокумент7 страницAccesorios de Ayuda Al Paciente EncamadoMakarena CalderonОценок пока нет
- ExperimentoДокумент2 страницыExperimentojimmylos zcОценок пока нет
- Capítulo 5 Clasificación de Los SuelosДокумент14 страницCapítulo 5 Clasificación de Los SuelosIsaac Vedia DiazОценок пока нет