Вам также может понравиться
- Golverk SAE920683Документ7 страницGolverk SAE920683geopakorn8961Оценок пока нет
- Efficiency Improvement With IMdrive With PI ControllerДокумент4 страницыEfficiency Improvement With IMdrive With PI ControllerHarsh AnandОценок пока нет
- Design of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS AlgorithmДокумент11 страницDesign of PI Controller in Pitch Control of Wind Turbine: A Comparison of PSO and PS Algorithmashikhmd4467Оценок пока нет
- Optimization of Intake and Exhaust System For FSAE Car Based On Orthogonal Array Testing PDFДокумент5 страницOptimization of Intake and Exhaust System For FSAE Car Based On Orthogonal Array Testing PDFDanielОценок пока нет
- Designing of Automotive Engine Electronic Throttle Control Valve IJERTCONV4IS21044 PDFДокумент4 страницыDesigning of Automotive Engine Electronic Throttle Control Valve IJERTCONV4IS21044 PDFHussnain AbbasОценок пока нет
- IJEART03703Документ4 страницыIJEART03703anil kasotОценок пока нет
- Efficient Rectified Stator Currents Hysteresis Control of The Induction Motor Drive and Flux Optimization Using Fuzzy LogicДокумент9 страницEfficient Rectified Stator Currents Hysteresis Control of The Induction Motor Drive and Flux Optimization Using Fuzzy LogicAli AltahirОценок пока нет
- Estimation of Gasoline-Engine Parameters Using Higher Order Sliding ModeДокумент8 страницEstimation of Gasoline-Engine Parameters Using Higher Order Sliding ModeenginehardwareОценок пока нет
- Formation of Driving Torque of Engine Inthe Technological Transport Machine With Multiphase Injection of FuelДокумент10 страницFormation of Driving Torque of Engine Inthe Technological Transport Machine With Multiphase Injection of FuelTJPRC PublicationsОценок пока нет
- Ris R 1500 PDFДокумент84 страницыRis R 1500 PDFshivakeesОценок пока нет
- Morimoto 2005Документ8 страницMorimoto 2005gerson gomesОценок пока нет
- A New Maximum Power Point Tracking Technique For Permanent Magnet Synchronous Generator Based Wind Energy Conversion SystemДокумент12 страницA New Maximum Power Point Tracking Technique For Permanent Magnet Synchronous Generator Based Wind Energy Conversion SystemArun KumarОценок пока нет
- Solar Powered Sensorless Induction Motor Drive With Improved Efficiency For Water PumpingДокумент11 страницSolar Powered Sensorless Induction Motor Drive With Improved Efficiency For Water PumpingHashim KhanОценок пока нет
- Efficient Use of An Induction MotorДокумент8 страницEfficient Use of An Induction MotorPUSHKARKHANNAОценок пока нет
- Field-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonДокумент9 страницField-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonTrần Tấn LộcОценок пока нет
- 445 AndradaДокумент5 страниц445 AndradaNishant GoyalОценок пока нет
- Application Research of Maximum Wind-Energy Tracing Controller Based Adaptive Control Strategy in WECSДокумент5 страницApplication Research of Maximum Wind-Energy Tracing Controller Based Adaptive Control Strategy in WECSEngr Tahir Iqbal AwanОценок пока нет
- Spark Ignition Engine Torque Management: Purdue University (West Lafayette, IN), Ford Motor Company (Dearborn, MI)Документ6 страницSpark Ignition Engine Torque Management: Purdue University (West Lafayette, IN), Ford Motor Company (Dearborn, MI)MohammadGhОценок пока нет
- Active Damping of Drive Train Oscillations For An Electrically Driven VehicleДокумент4 страницыActive Damping of Drive Train Oscillations For An Electrically Driven Vehiclejhg12Оценок пока нет
- Multiple Input Multiple Output Model Predictive Contr - 2010 - IFAC ProceedingsДокумент6 страницMultiple Input Multiple Output Model Predictive Contr - 2010 - IFAC ProceedingsmuradbashirОценок пока нет
- Controller Design Automation For Aeroservoelastic Design Optimization of Wind TurbinesДокумент7 страницController Design Automation For Aeroservoelastic Design Optimization of Wind Turbinesnim1987Оценок пока нет
- Electrically Powered Hydraulic Steering System: New Generation ofДокумент3 страницыElectrically Powered Hydraulic Steering System: New Generation ofVrushabh SahareОценок пока нет
- Uncertainty Issues in Direct and Indirect Efficiency Determination For Three-Phase Induction Motors Remarks About The IEC 60034-2-1 StandardДокумент16 страницUncertainty Issues in Direct and Indirect Efficiency Determination For Three-Phase Induction Motors Remarks About The IEC 60034-2-1 StandardDr.P.Venkatesh KumarОценок пока нет
- Optimal Controller Design of A Doubly-Fed Induction Generator Wind Turbine System For Small Signal Stability EnhancementДокумент19 страницOptimal Controller Design of A Doubly-Fed Induction Generator Wind Turbine System For Small Signal Stability EnhancementsveeraghantaОценок пока нет
- DSP-Based Experimental Rig With The Doubly-Fed Induction Generator ForДокумент12 страницDSP-Based Experimental Rig With The Doubly-Fed Induction Generator Fordebasis250Оценок пока нет
- Paper 2 PDFДокумент6 страницPaper 2 PDFSwati NikamОценок пока нет
- 18F032 Assignment 2Документ4 страницы18F032 Assignment 2Nivas JОценок пока нет
- Adaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet MotorДокумент6 страницAdaptive Torque Pulsation Compensation For A High-Torque DC Brushless Permanent Magnet Motorfong jeffОценок пока нет
- Inverter Performance Under Field ConditionsДокумент8 страницInverter Performance Under Field ConditionsRajesh DommetiОценок пока нет
- Sae Technical Paper Series: Yoshishige OhyamaДокумент12 страницSae Technical Paper Series: Yoshishige OhyamaVigneshWaranОценок пока нет
- Microprocessor-Based Control of Engine Valve TimingДокумент5 страницMicroprocessor-Based Control of Engine Valve TimingEdsonОценок пока нет
- Journal of Electrical EngineeringДокумент16 страницJournal of Electrical EngineeringkodandaramОценок пока нет
- Feasibility of A Thrust Control Mechanism by Regulating The Flow at The EngineДокумент9 страницFeasibility of A Thrust Control Mechanism by Regulating The Flow at The EngineIJRASETPublicationsОценок пока нет
- Design of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionДокумент10 страницDesign of A Wind Turbine Pitch Controller For Loads and Fatigue ReductionperkusicmОценок пока нет
- Piezo Adaptive Control MTZ 2006Документ3 страницыPiezo Adaptive Control MTZ 2006nomecОценок пока нет
- Electrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandДокумент8 страницElectrical Power and Energy Systems: A. Khodabakhshian, R. HooshmandNabin AdhikariОценок пока нет
- A Fuzzy Logic-Based MPPT Technique For PMSG Wind Generation SystemДокумент10 страницA Fuzzy Logic-Based MPPT Technique For PMSG Wind Generation SystemDileep VarmaОценок пока нет
- Maximum Power Point Tracking Algorithms For Wind Energy System: A ReviewДокумент7 страницMaximum Power Point Tracking Algorithms For Wind Energy System: A ReviewM Usman GhaniОценок пока нет
- Influence of The Variable-Speed Wind Generators in Transient Stability Margin of The Conventional Generators Integrated in Electrical GridsДокумент10 страницInfluence of The Variable-Speed Wind Generators in Transient Stability Margin of The Conventional Generators Integrated in Electrical GridsMohamed TalebОценок пока нет
- New Integration Algorithms For Estimating Motor Flux Over A Wide Speed RangeДокумент9 страницNew Integration Algorithms For Estimating Motor Flux Over A Wide Speed RangeBurakОценок пока нет
- Ecotecnia 48 750 Variable-Speed Wind TurbineДокумент4 страницыEcotecnia 48 750 Variable-Speed Wind TurbineMarcWorldОценок пока нет
- New SeminarДокумент23 страницыNew SeminarSheron ThomasОценок пока нет
- Comparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527Документ6 страницComparative Study and Implementation of Speed Control of BLDC Motor Using Traditional Pi and Fuzzy Pi Controller IJERTV9IS040527DIVYA PRASOONA CОценок пока нет
- A Nonlinear Engine Model For Drivetrain System DevelopmentДокумент5 страницA Nonlinear Engine Model For Drivetrain System Developmentsf111Оценок пока нет
- Energy Efficient Control of Three-Phase Induction Motor DriveДокумент6 страницEnergy Efficient Control of Three-Phase Induction Motor DrivenaserhashemniaОценок пока нет
- ! - BB Energies-15 2022 Speed Determination Is Crucial in Motors' Efficiency Estimation.Документ15 страниц! - BB Energies-15 2022 Speed Determination Is Crucial in Motors' Efficiency Estimation.Borislav BrnjadaОценок пока нет
- Engine Torque Ripple Cancellation With An Integrated Starter Alternator in A Hybrid Electric Vehicle: Implementation and ControlДокумент6 страницEngine Torque Ripple Cancellation With An Integrated Starter Alternator in A Hybrid Electric Vehicle: Implementation and Controlstefanovicana1Оценок пока нет
- A Review On Rapid Control of A Brushless Motor in An Hybrid SystemДокумент4 страницыA Review On Rapid Control of A Brushless Motor in An Hybrid Systemsunil kumarОценок пока нет
- High Performance Motor and Inverter System For A Hybrid VehicleДокумент6 страницHigh Performance Motor and Inverter System For A Hybrid VehiclePavan PОценок пока нет
- Energies: Study of The Miller Cycle On A Turbocharged DI Gasoline Engine Regarding Fuel Economy Improvement at Part LoadДокумент26 страницEnergies: Study of The Miller Cycle On A Turbocharged DI Gasoline Engine Regarding Fuel Economy Improvement at Part LoadMuhammad OwaisОценок пока нет
- Seamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftДокумент11 страницSeamless Dynamics For Wild-Frequency Active Rectifiers in More Electric AircraftBadal PatnaikОценок пока нет
- Wevj 01 00116Документ5 страницWevj 01 00116Rahil HussainОценок пока нет
- Paper 15Документ13 страницPaper 15RakeshconclaveОценок пока нет
- MPPT of Variable Speed Wind Turbine Equipped With PMSG With FLCДокумент7 страницMPPT of Variable Speed Wind Turbine Equipped With PMSG With FLCHeather ClevelandОценок пока нет
- Watts 3 w AU p ρC 2 1 m PДокумент7 страницWatts 3 w AU p ρC 2 1 m PAbhishek SinghОценок пока нет
- Designing An Adaptive Fuzzy Controller For Maximum Wind Energy ExtractionДокумент11 страницDesigning An Adaptive Fuzzy Controller For Maximum Wind Energy ExtractionYume YumeОценок пока нет
- Nicola - Marcel - ICATE 2016Документ6 страницNicola - Marcel - ICATE 2016Marcel NicolaОценок пока нет
- Ann 3Документ4 страницыAnn 3chawlavishnuОценок пока нет
- Power Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingДокумент12 страницPower Optimization and Control in Wind Energy Conversion Systems Using Extremum SeekingVijay RajuОценок пока нет
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsОт EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsОценок пока нет
- Prerequisite For HRV Biofeedback: Real-Time Detection of R PeaksДокумент4 страницыPrerequisite For HRV Biofeedback: Real-Time Detection of R PeaksSukma FirdausОценок пока нет
- Embedded Night-Vision System For Pedestrian DetectionДокумент12 страницEmbedded Night-Vision System For Pedestrian DetectionSukma FirdausОценок пока нет
- UQIДокумент4 страницыUQIBatoolОценок пока нет
- Research in Fuel Injection Revision Control of Gasoline Engine Based On The Electronic Throttle During Transient ConditionДокумент3 страницыResearch in Fuel Injection Revision Control of Gasoline Engine Based On The Electronic Throttle During Transient ConditionSukma FirdausОценок пока нет
- Robust Takagi-Sugeno Fuzzy Control For A Mini Aviation EngineДокумент6 страницRobust Takagi-Sugeno Fuzzy Control For A Mini Aviation EngineSukma FirdausОценок пока нет
- 04659886Документ5 страниц04659886Sukma FirdausОценок пока нет
- Study On Optimum Estimate Method For Gasoline Engine Intake Flowrate Based On State ObserverДокумент4 страницыStudy On Optimum Estimate Method For Gasoline Engine Intake Flowrate Based On State ObserverSukma FirdausОценок пока нет
- 1 s2.0 S0925521413002779 Main PDFДокумент6 страниц1 s2.0 S0925521413002779 Main PDFSukma FirdausОценок пока нет
- Remote Diagnosis and Control Expert System For Citrus Agricultural Diseases and Insect Pests Based On BP Neural Network and WebgisДокумент6 страницRemote Diagnosis and Control Expert System For Citrus Agricultural Diseases and Insect Pests Based On BP Neural Network and WebgisSukma FirdausОценок пока нет
- Automotive Electronic Fuel Injection Essential Design ConsiderationsДокумент10 страницAutomotive Electronic Fuel Injection Essential Design ConsiderationsSukma FirdausОценок пока нет
- An Ion-Drag Air Mass-Flow Sensor For Automotive ApplicationsДокумент6 страницAn Ion-Drag Air Mass-Flow Sensor For Automotive ApplicationsSukma FirdausОценок пока нет
- Nonlinear Control of A Spark-Ignition Engine: PierreДокумент10 страницNonlinear Control of A Spark-Ignition Engine: PierreSukma FirdausОценок пока нет
- A Precision Monolithic Time-Delay Generator For Use in Automotive Electronic Fuel Injection SystemsДокумент8 страницA Precision Monolithic Time-Delay Generator For Use in Automotive Electronic Fuel Injection SystemsSukma FirdausОценок пока нет
- Scientia Horticulturae: M.G. Kulkarni, G.D. Ascough, L. Verschaeve, K. Baeten, M.P. Arruda, J. Van StadenДокумент6 страницScientia Horticulturae: M.G. Kulkarni, G.D. Ascough, L. Verschaeve, K. Baeten, M.P. Arruda, J. Van StadenSukma FirdausОценок пока нет
- 1 s2.0 S0304423811001774 Main PDFДокумент8 страниц1 s2.0 S0304423811001774 Main PDFSukma FirdausОценок пока нет
- Mechanical Load and Its Effect On Bulb Onions Due To Harvest and Post-Harvest HandlingДокумент11 страницMechanical Load and Its Effect On Bulb Onions Due To Harvest and Post-Harvest HandlingSukma FirdausОценок пока нет
- Production of Bioethanol and Other Bio-Based MaterialsДокумент11 страницProduction of Bioethanol and Other Bio-Based Materialsnedian_2006Оценок пока нет
- Microcontroller Based Pest Management SystemДокумент4 страницыMicrocontroller Based Pest Management SystemSukma FirdausОценок пока нет
- PDFДокумент5 страницPDFSukma FirdausОценок пока нет
- Computers and Electronics in AgricultureДокумент9 страницComputers and Electronics in AgricultureSukma FirdausОценок пока нет
- Research and Implementation On The Platform For Electronic Agriculture With Web Application ServerДокумент2 страницыResearch and Implementation On The Platform For Electronic Agriculture With Web Application ServerSukma FirdausОценок пока нет
- Active Control of SoundДокумент10 страницActive Control of SoundAnonymous RILwqkaОценок пока нет
- En-BIM Technology and HoloBIM InnovationДокумент18 страницEn-BIM Technology and HoloBIM Innovationسعيد الحسنيОценок пока нет
- Xprealistic Pro Manual: Thank YouДокумент13 страницXprealistic Pro Manual: Thank YouMehdi SimОценок пока нет
- Week 2 ThyristorsДокумент34 страницыWeek 2 ThyristorsEDUARD VI DANDAОценок пока нет
- Project Proposal For Online Student ManagementДокумент2 страницыProject Proposal For Online Student ManagementEmrul Hasan70% (33)
- MID TERM EXAM REVIEWER GE 8 Science Technology and SocietyДокумент15 страницMID TERM EXAM REVIEWER GE 8 Science Technology and SocietyZainahl Danica DangcatanОценок пока нет
- Lesson 3: Building The User Interface by Using HTML5: Organization, Input, and ValidationДокумент6 страницLesson 3: Building The User Interface by Using HTML5: Organization, Input, and ValidationHamid AlriОценок пока нет
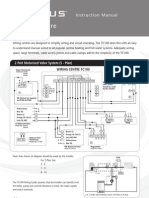
- CH Wiring DiagramДокумент2 страницыCH Wiring DiagramflyingpeteОценок пока нет
- SSI-2009 Plastic CatalogДокумент80 страницSSI-2009 Plastic CatalogModern Group, ltdОценок пока нет
- Victory Solution For Technical ConsultationsДокумент4 страницыVictory Solution For Technical Consultationsamul prakashОценок пока нет
- Literature SurveyДокумент9 страницLiterature SurveyifyОценок пока нет
- i6I6Pi6PE - Manual Installation PDFДокумент67 страницi6I6Pi6PE - Manual Installation PDFJair BernettОценок пока нет
- Ahmet Ondortoglu Principal RF Engineer: ExperienceДокумент12 страницAhmet Ondortoglu Principal RF Engineer: ExperienceMuthanna AliОценок пока нет
- 09 Samss 002Документ4 страницы09 Samss 002Kalanithi KasirajanОценок пока нет
- Writing A Resume and Job Application LetterДокумент14 страницWriting A Resume and Job Application LetterAzleena AliОценок пока нет
- Advanced Receiver Techniques: Executive SummaryДокумент5 страницAdvanced Receiver Techniques: Executive SummaryARTMehr Eng. GroupОценок пока нет
- Avr 505 ManualДокумент34 страницыAvr 505 ManualaxxelloneОценок пока нет
- The Learners Demonstrate An Understanding of The Learners Shall Be Able ToДокумент3 страницыThe Learners Demonstrate An Understanding of The Learners Shall Be Able Tolocklaim cardinozaОценок пока нет
- Attachment - 1 - 2021-10-27T013155.320Документ3 страницыAttachment - 1 - 2021-10-27T013155.320oliver wekesaОценок пока нет
- FuentealimentacionДокумент2 страницыFuentealimentacionMoisés PozaОценок пока нет
- VFX Careers Guide 2014Документ21 страницаVFX Careers Guide 2014gfxtoolscz100% (2)
- ELE8331 Power System Control Dr. Nuraddeen MagajiДокумент25 страницELE8331 Power System Control Dr. Nuraddeen MagajiumarsaboОценок пока нет
- Window SosДокумент18 страницWindow SosJanela Natal MurilloОценок пока нет
- ST06Документ23 страницыST06Hung HoangTheОценок пока нет
- A Model For The Lean IT Organization - Mark McDonaldДокумент5 страницA Model For The Lean IT Organization - Mark McDonaldLucianoОценок пока нет
- Omnis Graphs: Using The Graph2 ComponentДокумент57 страницOmnis Graphs: Using The Graph2 ComponentGt GtОценок пока нет
- Intermec Enable Scanner Port Is Grayed Out in Internal Scanner Options On An Intermec Mobile ComputerДокумент3 страницыIntermec Enable Scanner Port Is Grayed Out in Internal Scanner Options On An Intermec Mobile Computercocibolca61Оценок пока нет
- TER SampleДокумент26 страницTER Samplekenneth molinaОценок пока нет
- Data Sheet Level Gauge: GeneralДокумент5 страницData Sheet Level Gauge: GeneralJKKОценок пока нет
- C3 Hydraulic DiagramДокумент1 страницаC3 Hydraulic DiagramMiguel GutierrezОценок пока нет
- 23pu200 SeriesДокумент32 страницы23pu200 SeriesKsatria PratamaОценок пока нет