Вам также может понравиться
- Basic of An Electrical Control PanelДокумент16 страницBasic of An Electrical Control PanelJim Erol Bancoro100% (2)
- Pindyck TestBank 7eДокумент17 страницPindyck TestBank 7eVictor Firmana100% (5)
- Basic Vibration Analysis Training-1Документ193 страницыBasic Vibration Analysis Training-1Sanjeevi Kumar SpОценок пока нет
- HSBC in A Nut ShellДокумент190 страницHSBC in A Nut Shelllanpham19842003Оценок пока нет
- Lab3 Temperature and Calibration - FINALrrДокумент6 страницLab3 Temperature and Calibration - FINALrrDerrick SheeОценок пока нет
- SOP-Procedure Calibration of Metal TapesДокумент12 страницSOP-Procedure Calibration of Metal Tapeshaharamesh100% (1)
- Coir Moisture MeterДокумент4 страницыCoir Moisture Metersaurabh_acmasОценок пока нет
- Color I MeterДокумент8 страницColor I MeterVishal GoswamiОценок пока нет
- USP Certificate: Caffeine Melting Point StandardДокумент2 страницыUSP Certificate: Caffeine Melting Point StandardKimia AsikОценок пока нет
- G100 Manual Update 10.8.18 DiamondДокумент54 страницыG100 Manual Update 10.8.18 DiamondViasensor InfoОценок пока нет
- Customer Details:: Test Reading STD - Reading Error Uncertainty S.NoДокумент2 страницыCustomer Details:: Test Reading STD - Reading Error Uncertainty S.NomaniОценок пока нет
- Microcoulomb AnalyzerДокумент4 страницыMicrocoulomb Analyzersaurabh_acmasОценок пока нет
- Particle Charge TestДокумент2 страницыParticle Charge TestBhaskar Pratim DasОценок пока нет
- KippZonen ISO9847 Calibration StatementДокумент1 страницаKippZonen ISO9847 Calibration Statementmoro1381Оценок пока нет
- Certificate of Analysis ListДокумент3 страницыCertificate of Analysis ListFabian GarciaОценок пока нет
- MsaДокумент3 страницыMsaRicardo RuizОценок пока нет
- Leather Moisture MeterДокумент4 страницыLeather Moisture Metersaurabh_acmasОценок пока нет
- Coffee Moisture MeterДокумент4 страницыCoffee Moisture Metersaurabh_acmasОценок пока нет
- Certificate of Analysis ListДокумент3 страницыCertificate of Analysis ListJorge Luis ParraОценок пока нет
- Sound and Vibration IsulationДокумент9 страницSound and Vibration Isulationferdinand laiОценок пока нет
- Asbestos Moisture MeterДокумент6 страницAsbestos Moisture Metersaurabh_acmasОценок пока нет
- Liquid-in-Glass Thermometer Calibration: Principle of Operation Traceability ChartДокумент1 страницаLiquid-in-Glass Thermometer Calibration: Principle of Operation Traceability ChartbasdownloadОценок пока нет
- Industrial Training Report On NTPC DADRIДокумент75 страницIndustrial Training Report On NTPC DADRINitin SinghОценок пока нет
- Measurement of Respirable Crystalline Silica in Workplace Air by Infrared SpectrometryДокумент17 страницMeasurement of Respirable Crystalline Silica in Workplace Air by Infrared SpectrometryasmaОценок пока нет
- Coulometric Sulfur AnalyzerДокумент4 страницыCoulometric Sulfur Analyzersaurabh_acmasОценок пока нет
- Crack Depth GaugeДокумент4 страницыCrack Depth Gaugesaurabh_acmasОценок пока нет
- HAXO 8 Product Brochure OptДокумент2 страницыHAXO 8 Product Brochure OptAnjas WidiОценок пока нет
- 2012 Calibrations in Process Control and AutomationДокумент11 страниц2012 Calibrations in Process Control and AutomationLALIT RAAZPOOTОценок пока нет
- Entomological Chamber: Model No. - Acm-7131RДокумент8 страницEntomological Chamber: Model No. - Acm-7131RAcmas IndiaОценок пока нет
- Expression of Uncertainty in MeasurementДокумент1 страницаExpression of Uncertainty in MeasurementamishraiocОценок пока нет
- HiLoWeldGage PDFДокумент1 страницаHiLoWeldGage PDFJlaraneda SantiagoОценок пока нет
- Sodrati - Lighthouse Products (2019)Документ5 страницSodrati - Lighthouse Products (2019)Vu SonОценок пока нет
- Microprocessor Based COD Analysis ColorimeterДокумент4 страницыMicroprocessor Based COD Analysis Colorimetersaurabh_acmasОценок пока нет
- Bod Cell TestДокумент1 страницаBod Cell TestΠΟΠΗОценок пока нет
- Tea Moisture MeterДокумент4 страницыTea Moisture Metersaurabh_acmasОценок пока нет
- Semi Automatic Polarimeter: MODEL NO. - ACM-SAP-2644Документ4 страницыSemi Automatic Polarimeter: MODEL NO. - ACM-SAP-2644saurabh_acmasОценок пока нет
- Design Bioreactor For The Production OF Biopharmaceuticals From Animal CellsДокумент38 страницDesign Bioreactor For The Production OF Biopharmaceuticals From Animal Cellsijat_Оценок пока нет
- Confidence in MeasurementДокумент8 страницConfidence in MeasurementloleОценок пока нет
- Question About Liquid in Glass ThermometersДокумент2 страницыQuestion About Liquid in Glass ThermometersSuresh SenanayakeОценок пока нет
- CRSR507F1Документ1 страницаCRSR507F1armando fuentesОценок пока нет
- FreshPoint Service Manual 42264Документ40 страницFreshPoint Service Manual 42264Vemulapalli SaibabuОценок пока нет
- Feature Advantage Benefit (CelCulture CO2 Incubator Range)Документ4 страницыFeature Advantage Benefit (CelCulture CO2 Incubator Range)Michael G. BasaОценок пока нет
- Casella CEL-712 User ManualДокумент50 страницCasella CEL-712 User ManualarjmandquestОценок пока нет
- Certificate of Analysis: Retinyl Palmitate (Vitamin A Palmitate)Документ6 страницCertificate of Analysis: Retinyl Palmitate (Vitamin A Palmitate)Anonymous pCIauPOGОценок пока нет
- A Note About Scale BioreactorДокумент6 страницA Note About Scale BioreactorCupi MarceilaОценок пока нет
- LWS Technical Paper - Impaction Technology and ISO 14698Документ11 страницLWS Technical Paper - Impaction Technology and ISO 14698BLUEPRINT Integrated Engineering ServicesОценок пока нет
- TDS X-RAY Calibration Standards 952-025 EnBIGДокумент40 страницTDS X-RAY Calibration Standards 952-025 EnBIGPO Hsien YUОценок пока нет
- A Study On Verification of SphygmomanometersДокумент3 страницыA Study On Verification of SphygmomanometerssujudОценок пока нет
- Validation of The Calibration Procedure in Atomic Absorption Spectrometric MethodsДокумент10 страницValidation of The Calibration Procedure in Atomic Absorption Spectrometric MethodsaureaborosОценок пока нет
- As 1004.2-1998 Surface Plates For Metrology GraniteДокумент8 страницAs 1004.2-1998 Surface Plates For Metrology GraniteSAI Global - APACОценок пока нет
- Manual CabinaДокумент26 страницManual CabinaMigue ZabaletaОценок пока нет
- R135 E04Документ48 страницR135 E04naranjocarlosОценок пока нет
- DKD Guidance - Calibration of Liquid WaterДокумент14 страницDKD Guidance - Calibration of Liquid WatergustavoesanchezОценок пока нет
- Freeze-Tag® Indicator (10 Minutes) : DescriptionДокумент1 страницаFreeze-Tag® Indicator (10 Minutes) : DescriptionYunis MirzeyevОценок пока нет
- Water ActivityДокумент16 страницWater ActivityarunОценок пока нет
- Certificate of Calibration: HTLS/DPG/04Документ2 страницыCertificate of Calibration: HTLS/DPG/04Umang SOdhiОценок пока нет
- (De Gruyter Textbook) Vic Soffiantini - Analytical Chemistry - Principles and Practice-De Gruyter (2021)Документ314 страниц(De Gruyter Textbook) Vic Soffiantini - Analytical Chemistry - Principles and Practice-De Gruyter (2021)Jean Bosco VuningomaОценок пока нет
- Ultrasonic Test of Steel Plates and Forgings: Technical Purchase Specification Acc. To DIN/EN and ASME-CodeДокумент2 страницыUltrasonic Test of Steel Plates and Forgings: Technical Purchase Specification Acc. To DIN/EN and ASME-CodeKerem DemirbaşОценок пока нет
- MIL-STD-810G Salt Spray Portion OnlyДокумент10 страницMIL-STD-810G Salt Spray Portion Onlyeklock01Оценок пока нет
- I&M Lab ManualДокумент57 страницI&M Lab ManualTabish MalikОценок пока нет
- CSTR Unit Ops LabДокумент7 страницCSTR Unit Ops LabKelly Sheine SisonОценок пока нет
- Experiment 3 PDFДокумент9 страницExperiment 3 PDFMuhammad TouheedОценок пока нет
- Bismark FormalДокумент15 страницBismark FormalBENОценок пока нет
- Natural ConДокумент6 страницNatural Conmohmmad othmanОценок пока нет
- TSB 120Документ7 страницTSB 120patelpiyushbОценок пока нет
- Ikea AnalysisДокумент33 страницыIkea AnalysisVinod BridglalsinghОценок пока нет
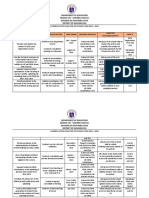
- Weekly Learning PlanДокумент2 страницыWeekly Learning PlanJunrick DalaguitОценок пока нет
- Form Three Physics Handbook-1Документ94 страницыForm Three Physics Handbook-1Kisaka G100% (1)
- Seminar On Despute Resolution & IPR Protection in PRCДокумент4 страницыSeminar On Despute Resolution & IPR Protection in PRCrishi000071985100% (2)
- MSDS - Tuff-Krete HD - Part DДокумент6 страницMSDS - Tuff-Krete HD - Part DAl GuinitaranОценок пока нет
- Gender Ratio of TeachersДокумент80 страницGender Ratio of TeachersT SiddharthОценок пока нет
- M J 1 MergedДокумент269 страницM J 1 MergedsanyaОценок пока нет
- Proceedings of SpieДокумент7 страницProceedings of SpieNintoku82Оценок пока нет
- Action Plan Lis 2021-2022Документ3 страницыAction Plan Lis 2021-2022Vervie BingalogОценок пока нет
- Datasheet Qsfp28 PAMДокумент43 страницыDatasheet Qsfp28 PAMJonny TОценок пока нет
- Experiment On Heat Transfer Through Fins Having Different NotchesДокумент4 страницыExperiment On Heat Transfer Through Fins Having Different NotcheskrantiОценок пока нет
- EnerconДокумент7 страницEnerconAlex MarquezОценок пока нет
- General Financial RulesДокумент9 страницGeneral Financial RulesmskОценок пока нет
- Lactobacillus Acidophilus - Wikipedia, The Free EncyclopediaДокумент5 страницLactobacillus Acidophilus - Wikipedia, The Free Encyclopediahlkjhlkjhlhkj100% (1)
- Mat Boundary Spring Generator With KX Ky KZ KMX KMy KMZДокумент3 страницыMat Boundary Spring Generator With KX Ky KZ KMX KMy KMZcesar rodriguezОценок пока нет
- Enerparc - India - Company Profile - September 23Документ15 страницEnerparc - India - Company Profile - September 23AlokОценок пока нет
- Methodical Pointing For Work of Students On Practical EmploymentДокумент32 страницыMethodical Pointing For Work of Students On Practical EmploymentVidhu YadavОценок пока нет
- 004-PA-16 Technosheet ICP2 LRДокумент2 страницы004-PA-16 Technosheet ICP2 LRHossam MostafaОценок пока нет
- Professional Regula/on Commission: Clarita C. Maaño, M.DДокумент31 страницаProfessional Regula/on Commission: Clarita C. Maaño, M.Dmiguel triggartОценок пока нет
- Multispan LC 2046 Length Counter PDFДокумент2 страницыMultispan LC 2046 Length Counter PDFvinod kumarОценок пока нет
- TSR KuДокумент16 страницTSR KuAngsaОценок пока нет
- My CoursesДокумент108 страницMy Coursesgyaniprasad49Оценок пока нет
- 90FF1DC58987 PDFДокумент9 страниц90FF1DC58987 PDFfanta tasfayeОценок пока нет
- BASUG School Fees For Indigene1Документ3 страницыBASUG School Fees For Indigene1Ibrahim Aliyu GumelОценок пока нет
- 2021S-EPM 1163 - Day-11-Unit-8 ProcMgmt-AODAДокумент13 страниц2021S-EPM 1163 - Day-11-Unit-8 ProcMgmt-AODAehsan ershadОценок пока нет