Вам также может понравиться
- Design Report For A Formula Electric CarДокумент2 страницыDesign Report For A Formula Electric CarSalwa Paracha100% (1)
- UCEM Accumulator Final ReportДокумент40 страницUCEM Accumulator Final ReportRodrigo BobОценок пока нет
- Sonu 1Документ19 страницSonu 1Sonu SinghОценок пока нет
- HEVДокумент40 страницHEVVwila NyirendaОценок пока нет
- Design of A Real Time Smart Honking SystemДокумент6 страницDesign of A Real Time Smart Honking SystemArka MajumdarОценок пока нет
- Designing & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingДокумент10 страницDesigning & Analysis of Supercapacitor Hybrid Battery System With Regenerative BrakingIJRASETPublicationsОценок пока нет
- Grid Connected Induction Generator and Self Excited Induction Generator..Документ3 страницыGrid Connected Induction Generator and Self Excited Induction Generator..Sunil JainОценок пока нет
- Indian Two Wheeler Market Analysis and Forecast 2030Документ22 страницыIndian Two Wheeler Market Analysis and Forecast 2030sinharicОценок пока нет
- 2021-IEEE-Feasibility of Grid-Connected Solar-Wind Hybrid System With Electric Vehicle Charging StationДокумент12 страниц2021-IEEE-Feasibility of Grid-Connected Solar-Wind Hybrid System With Electric Vehicle Charging StationĐỗ Văn LongОценок пока нет
- Electric Vehicle Modelling and SimulationДокумент25 страницElectric Vehicle Modelling and SimulationLakshmanan subas chandra bose100% (1)
- DC/DC Converters For Electric Vehicles: Monzer Al Sakka, Joeri Van Mierlo and Hamid GualousДокумент25 страницDC/DC Converters For Electric Vehicles: Monzer Al Sakka, Joeri Van Mierlo and Hamid Gualousme_droidОценок пока нет
- Group-3 - (Battery Charging Circuit Using SCR)Документ15 страницGroup-3 - (Battery Charging Circuit Using SCR)Nayem IslamОценок пока нет
- 01 BOOST Release NotesДокумент17 страниц01 BOOST Release NoteshenevilОценок пока нет
- Induction Motor ReviewДокумент25 страницInduction Motor ReviewAhmedОценок пока нет
- Batteries Components and Types - For EV ApplicationsДокумент44 страницыBatteries Components and Types - For EV ApplicationsGauthiОценок пока нет
- 16 RegenerationДокумент3 страницы16 RegenerationHüseyin Murat PolaterОценок пока нет
- Formula Student Electric VehicleДокумент4 страницыFormula Student Electric VehicleAnay DalviОценок пока нет
- Master ThesisДокумент82 страницыMaster ThesisYash Maheshwari100% (1)
- 01 - Introduction To Multilevel InvertersДокумент53 страницы01 - Introduction To Multilevel Invertersp09el860Оценок пока нет
- Diac CharacteristicsДокумент6 страницDiac CharacteristicsSourabh100% (1)
- Cuk, Sepic Zeta NptelДокумент20 страницCuk, Sepic Zeta NptelAvinash Babu KmОценок пока нет
- 17ee82 - Ida - Mod 4 NotesДокумент18 страниц17ee82 - Ida - Mod 4 NotesManish Kumar SahaniОценок пока нет
- A Solar PV Array Based Multipurpose EV ChargerДокумент6 страницA Solar PV Array Based Multipurpose EV ChargerIJAERS JOURNALОценок пока нет
- Cruise Control of Bruhless DC MotorДокумент12 страницCruise Control of Bruhless DC MotorVishal PhadtareОценок пока нет
- Development of CNG Injection EngineДокумент8 страницDevelopment of CNG Injection EngineShasahank JoshiОценок пока нет
- Electric Drives Kee075Документ2 страницыElectric Drives Kee075xefedoy533Оценок пока нет
- Supercapacitors: New Super Energy Storage Device: Nitin Kathuria, Assistant Professor Richa Sharma, LecturerДокумент4 страницыSupercapacitors: New Super Energy Storage Device: Nitin Kathuria, Assistant Professor Richa Sharma, LecturerNitin Kathuria100% (1)
- Effect of Load Modeling On Voltage StabilityДокумент6 страницEffect of Load Modeling On Voltage Stabilityiniran2Оценок пока нет
- Project Anti Sleeping ReportДокумент29 страницProject Anti Sleeping ReportRahul RkОценок пока нет
- AVR492: Brushless DC Motor Control Using AT90PWM3: Application NoteДокумент26 страницAVR492: Brushless DC Motor Control Using AT90PWM3: Application NotenicoletabytaxОценок пока нет
- HybridДокумент101 страницаHybridzinabu solomonОценок пока нет
- Auto Power Supply Control From 4 Different SourcesДокумент19 страницAuto Power Supply Control From 4 Different SourcesCh SwethaОценок пока нет
- Construction and Working of Brushless DC PDFДокумент12 страницConstruction and Working of Brushless DC PDFaswardi8756Оценок пока нет
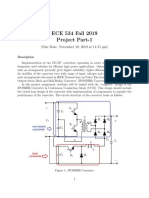
- ECE 534 Project 1 F19Документ6 страницECE 534 Project 1 F19JAY CHHEDAОценок пока нет
- Voltage Regulator AutoTuningДокумент12 страницVoltage Regulator AutoTuningНиколай МухаОценок пока нет
- A Project Seminar On: Design and Fabrication of Hybrid Electric BikeДокумент19 страницA Project Seminar On: Design and Fabrication of Hybrid Electric BikeNaziya TazeenОценок пока нет
- EV NotesДокумент16 страницEV Notesgaddala kaladharОценок пока нет
- Vtu Electricvehecles Module2openelectivepptbydr 221021054719 1293bcdfДокумент64 страницыVtu Electricvehecles Module2openelectivepptbydr 221021054719 1293bcdfprashantkumar chinamalliОценок пока нет
- Subject Name: Electric Drive Subject Code: 6EE4-05: Introduction: Objective, Scope and Outcome of The CourseДокумент9 страницSubject Name: Electric Drive Subject Code: 6EE4-05: Introduction: Objective, Scope and Outcome of The CourseAbhíñåv PrâjãpätîОценок пока нет
- Implementation of An Active Battery Balancer Using Fly-Back TransformerДокумент4 страницыImplementation of An Active Battery Balancer Using Fly-Back TransformerDebdeep MondalОценок пока нет
- Simulink Battery ModelДокумент12 страницSimulink Battery ModelnpnegociosОценок пока нет
- Guess Paper Uep Solution 7141Документ51 страницаGuess Paper Uep Solution 7141RJ 13Оценок пока нет
- How To Size MCBДокумент4 страницыHow To Size MCBpravin chawleОценок пока нет
- Design and Fabrication of Electromagnetic EngineДокумент35 страницDesign and Fabrication of Electromagnetic EngineParth MaldhureОценок пока нет
- BY Pratik Kumar Singh Roll No. 16529Документ18 страницBY Pratik Kumar Singh Roll No. 16529Yogesh AnandОценок пока нет
- InvertersДокумент35 страницInvertersyashtОценок пока нет
- MJR ppt-1Документ15 страницMJR ppt-1teslaОценок пока нет
- Plug-In HEV Vehicle Design Options and Expectations: ZEV Technology SymposiumДокумент20 страницPlug-In HEV Vehicle Design Options and Expectations: ZEV Technology SymposiumJimmyGGОценок пока нет
- Lab MachineДокумент9 страницLab MachineAnonymous ryvoPIDОценок пока нет
- 202 - EE8601, EE6601 Solid State Drives - NotesДокумент140 страниц202 - EE8601, EE6601 Solid State Drives - NotesUdayОценок пока нет
- Energy Management Strategy For A Hybrid Electric VehicleДокумент10 страницEnergy Management Strategy For A Hybrid Electric VehicleJuan Pablo Chamorro AguadoОценок пока нет
- Advanced Speed Control Techniques of Brushless DC MotorДокумент17 страницAdvanced Speed Control Techniques of Brushless DC Motorsrinupid100% (1)
- 12v Battery Charger Circuit Using LM317Документ13 страниц12v Battery Charger Circuit Using LM317Nike 03100% (1)
- Basic - BATTERY PACK HOUSINGДокумент9 страницBasic - BATTERY PACK HOUSINGAkshay bypОценок пока нет
- Charging System Leture and Quiz1Документ5 страницCharging System Leture and Quiz1Mae CherryОценок пока нет
- How To Read MCB Nameplate RatingДокумент4 страницыHow To Read MCB Nameplate RatingfauzОценок пока нет
- Seminar ReportДокумент24 страницыSeminar ReportPriyanka Shirsat100% (1)
- Microcontroller Based Solar Charger: A Project Report OnДокумент51 страницаMicrocontroller Based Solar Charger: A Project Report Oniwantinthatve67% (3)
- QUESTIOnsДокумент9 страницQUESTIOnsKrishna KarthikОценок пока нет
- Navaratna CompaniesДокумент3 страницыNavaratna CompaniesNag ReddyОценок пока нет
- HEVДокумент9 страницHEVraj_selvaraj10Оценок пока нет
- Prepositionschecklist PDFДокумент1 страницаPrepositionschecklist PDFAndreea DanielaОценок пока нет
- SQL NotesДокумент67 страницSQL NotesKrishna KarthikОценок пока нет
- Electrical Companies List: 10. Apgenco/ Aptransco/ApcpdclДокумент4 страницыElectrical Companies List: 10. Apgenco/ Aptransco/ApcpdclKrishna KarthikОценок пока нет
- AnnouncementsДокумент1 страницаAnnouncementsKrishna KarthikОценок пока нет
- SQL NotesДокумент67 страницSQL NotesKrishna KarthikОценок пока нет
- Syllabus CWCДокумент5 страницSyllabus CWCDowlath BashaОценок пока нет
- SSC EE PDFДокумент26 страницSSC EE PDFKrishna KarthikОценок пока нет
- Ielst Writing SamplesДокумент12 страницIelst Writing SamplesThomas StpeterОценок пока нет
- Q. 1 - Q. 5 Carry One Mark Each.: GATE 2016 General Aptitude - GA Set-6Документ18 страницQ. 1 - Q. 5 Carry One Mark Each.: GATE 2016 General Aptitude - GA Set-6Mohd Monis RazaОценок пока нет
- Tcs 6Документ2 страницыTcs 6Krishna KarthikОценок пока нет
- Unit 8 CMP PDFДокумент10 страницUnit 8 CMP PDFKrishna KarthikОценок пока нет
- Flow ChartДокумент3 страницыFlow Chartnitin235Оценок пока нет
- ScadaДокумент6 страницScadaKrishna KarthikОценок пока нет
- Ee1 PDFДокумент2 страницыEe1 PDFKrishna KarthikОценок пока нет
- Blood RLДокумент7 страницBlood RLmadhurendrahraОценок пока нет
- Q. No. Type Section Key Marks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36Документ2 страницыQ. No. Type Section Key Marks 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36Krishna KarthikОценок пока нет
- Computer Analysis of Power SystemsДокумент381 страницаComputer Analysis of Power SystemsAgha Nnachi100% (6)
- Restructured Electrical: Power SystemsДокумент1 страницаRestructured Electrical: Power SystemsKrishna KarthikОценок пока нет
- CERES News Digest - Week 11, Vol.4, March 31-April 4Документ6 страницCERES News Digest - Week 11, Vol.4, March 31-April 4Center for Eurasian, Russian and East European StudiesОценок пока нет
- Basic Details: Government Eprocurement SystemДокумент4 страницыBasic Details: Government Eprocurement SystemNhai VijayawadaОценок пока нет
- BSDC CCOE DRAWING FOR 2x6 KL R-1Документ1 страницаBSDC CCOE DRAWING FOR 2x6 KL R-1best viedosОценок пока нет
- East St. Louis, Illinois - Wikipedia, The Free EncyclopediaДокумент9 страницEast St. Louis, Illinois - Wikipedia, The Free Encyclopediadavid rockОценок пока нет
- "Laughter Is Part of The Human Survival Kit. : David NathanДокумент4 страницы"Laughter Is Part of The Human Survival Kit. : David NathanTrang NhungОценок пока нет
- Q3 Week 1 Homeroom Guidance JGRДокумент9 страницQ3 Week 1 Homeroom Guidance JGRJasmin Goot Rayos50% (4)
- Newton Gauss MethodДокумент37 страницNewton Gauss MethodLucas WeaverОценок пока нет
- Mittal Corp LTD 22ND November 2022Документ4 страницыMittal Corp LTD 22ND November 2022Etrans 9Оценок пока нет
- Scheduled Events in MySQL Load CSV Fileto MysqltabДокумент11 страницScheduled Events in MySQL Load CSV Fileto Mysqltabboil35Оценок пока нет
- As 3789.2-1991 Textiles For Health Care Facilities and Institutions Theatre Linen and Pre-PacksДокумент9 страницAs 3789.2-1991 Textiles For Health Care Facilities and Institutions Theatre Linen and Pre-PacksSAI Global - APACОценок пока нет
- Philippine First Insurance V HartiganДокумент3 страницыPhilippine First Insurance V HartiganAlexander Genesis DungcaОценок пока нет
- Hospital Management System DatabaseДокумент18 страницHospital Management System DatabasesamdhathriОценок пока нет
- EE FlowchartДокумент1 страницаEE Flowchartgoogley71Оценок пока нет
- TreeSize Professional - Folder Contents of - CДокумент1 страницаTreeSize Professional - Folder Contents of - CHenrique GilОценок пока нет
- Suggested Answers Spring 2015 Examinations 1 of 8: Strategic Management Accounting - Semester-6Документ8 страницSuggested Answers Spring 2015 Examinations 1 of 8: Strategic Management Accounting - Semester-6Abdul BasitОценок пока нет
- Payment Systems Worldwide: Appendix Country-by-Country AnswersДокумент306 страницPayment Systems Worldwide: Appendix Country-by-Country Answersravinewatia27Оценок пока нет
- Curriculum Vitae H R VijayДокумент8 страницCurriculum Vitae H R VijayvijaygowdabdvtОценок пока нет
- Course Syllabus: Ecommerce & Internet MarketingДокумент23 страницыCourse Syllabus: Ecommerce & Internet MarketingMady RamosОценок пока нет
- Cost Volume Profit AnalysisДокумент7 страницCost Volume Profit AnalysisMatinChris KisomboОценок пока нет
- How To Make Affidavit at Pune Collector OfficeДокумент1 страницаHow To Make Affidavit at Pune Collector Officejayram1961Оценок пока нет
- Note 2958296 Pre-Implementation Steps: Create Table TypeДокумент3 страницыNote 2958296 Pre-Implementation Steps: Create Table Typevishnu900890Оценок пока нет
- Computer Graphics Mini ProjectДокумент25 страницComputer Graphics Mini ProjectGautam Singh78% (81)
- LaMOT Rupture DiscsДокумент20 страницLaMOT Rupture Discshlrich99Оценок пока нет
- Wilcox - Umn - 0130E - 12886 - Competency RevisedДокумент160 страницWilcox - Umn - 0130E - 12886 - Competency RevisedShasteen Bautista SantosОценок пока нет
- 1100D Fuel System Installation Guide PDFДокумент18 страниц1100D Fuel System Installation Guide PDFjAVIER GARCIA MORIANAОценок пока нет
- Audit Process - Performing Substantive TestДокумент49 страницAudit Process - Performing Substantive TestBooks and Stuffs100% (1)
- O-CNN: Octree-Based Convolutional Neural Networks For 3D Shape AnalysisДокумент11 страницO-CNN: Octree-Based Convolutional Neural Networks For 3D Shape AnalysisJose Angel Duarte MartinezОценок пока нет
- Kolodin Agreement For Discipline by ConsentДокумент21 страницаKolodin Agreement For Discipline by ConsentJordan ConradsonОценок пока нет
- A88438-23 Critical Procedure 11-01 - Pipeline Cut Outs - A5X9W9Документ7 страницA88438-23 Critical Procedure 11-01 - Pipeline Cut Outs - A5X9W9mahmoudОценок пока нет
- Ibt - Module 2 International Trade - Theories Are: Classical and Are From The PerspectiveДокумент9 страницIbt - Module 2 International Trade - Theories Are: Classical and Are From The PerspectiveLyca NegrosОценок пока нет