Вам также может понравиться
- Dess 1 Cours - Modelisation - Des - Liaisons - eДокумент7 страницDess 1 Cours - Modelisation - Des - Liaisons - eelvis etienneОценок пока нет
- Devoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFДокумент4 страницыDevoir de Synthèse N°2 2012 2013 (Abdallah Raouafi) PDFSimo StitОценок пока нет
- Exercice ReducteurДокумент8 страницExercice ReducteurGyОценок пока нет
- Dessin D'ensДокумент27 страницDessin D'ensIsrae El AmriОценок пока нет
- Liaison EncastrementДокумент18 страницLiaison Encastrementkhocine100% (1)
- Cours Modelisation Des Liaisons eДокумент8 страницCours Modelisation Des Liaisons entayoub100% (1)
- IsostatismeДокумент36 страницIsostatismedidinedОценок пока нет
- Cours MicrДокумент30 страницCours MicrDOUNIAОценок пока нет
- Cours Modelisation Des LiaisonsДокумент4 страницыCours Modelisation Des LiaisonsAristide DOSSOUОценок пока нет
- Cota 2023Документ12 страницCota 2023hamrouniОценок пока нет
- Corrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonДокумент8 страницCorrigé Des Exercices Module Technologie Exercices: Surface Ou L'organe de LiaisonpinamarkОценок пока нет
- TD Avant RattrapageДокумент6 страницTD Avant RattrapageBakary Biro100% (1)
- DevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Документ6 страницDevoirDeSyntheseN3 1AS 2008 Etau D'usinage Mixeur 2Rabia ZaiedОценок пока нет
- Les Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLДокумент14 страницLes Liaisons Non Permanentes (ASSEMBLAGES) CH 04 1er Année GPLTom BriderОценок пока нет
- CsveДокумент25 страницCsveDhaouadi AymenОценок пока нет
- Saber DC N1 1S3 2021 2022'Документ4 страницыSaber DC N1 1S3 2021 2022'Adam BensaidОценок пока нет
- Exercices de Dessin Technique Exercices of Engineering DrawingДокумент32 страницыExercices de Dessin Technique Exercices of Engineering DrawingABDELHAKIMОценок пока нет
- C R Reducteur 1Документ16 страницC R Reducteur 1Amal AmalОценок пока нет
- Examen A05 SolutionДокумент7 страницExamen A05 SolutionAbdallah SbaghdiОценок пока нет
- 1 TD Liaisons EncastrementДокумент9 страниц1 TD Liaisons EncastrementWael metouiОценок пока нет
- Cours Modelisation Des Liaisons eДокумент7 страницCours Modelisation Des Liaisons eMed Aymen Bensalem100% (1)
- Cours Liaisons Schema CinematiqueДокумент20 страницCours Liaisons Schema CinematiquekimОценок пока нет
- TP Serre JointДокумент4 страницыTP Serre Jointbakhchouch100% (1)
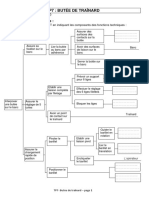
- 07 Butee TrainardДокумент5 страниц07 Butee TrainardHkiri MohamedОценок пока нет
- Guidage en Translation PDFДокумент10 страницGuidage en Translation PDFAzerty DelegfrОценок пока нет
- 2 Éme Cours de Dessin Industriel 3 CMДокумент14 страниц2 Éme Cours de Dessin Industriel 3 CMMohamed IsLemОценок пока нет
- Pro 2017Документ14 страницPro 2017Crazy ytОценок пока нет
- Les Tolérances GéométriquesДокумент11 страницLes Tolérances GéométriquesakouОценок пока нет
- Touret A MeulerДокумент15 страницTouret A MeulerrahmaboufalghaОценок пока нет
- Exercices de ReperageДокумент5 страницExercices de ReperagekhocineОценок пока нет
- Cours Cotation Fonctionnelle PRДокумент4 страницыCours Cotation Fonctionnelle PRRachid TopОценок пока нет
- Manuel de Reference 4st Version1Документ222 страницыManuel de Reference 4st Version1Zied MakkiОценок пока нет
- TCP-05-Rep-Projection-Orthogonale P 44Документ1 страницаTCP-05-Rep-Projection-Orthogonale P 44Jujo BugaОценок пока нет
- AjutstemtДокумент2 страницыAjutstemtDomo PulseОценок пока нет
- 1-Le Schéma Cinématique Des MécanismesДокумент8 страниц1-Le Schéma Cinématique Des MécanismesSegaAlainCoulibalyОценок пока нет
- CATIA V5 DocumentДокумент6 страницCATIA V5 DocumentChokri AtefОценок пока нет
- TP10 Meca3D Scie SauteuseДокумент3 страницыTP10 Meca3D Scie SauteuseC'est Yana100% (1)
- Clavette Goupille Emm Conique ReduitДокумент6 страницClavette Goupille Emm Conique ReduitMoez BenjaberОценок пока нет
- Rondelles BellevilleДокумент5 страницRondelles BellevilleMahrez ZaafouriОценок пока нет
- EXERCICE10Документ8 страницEXERCICE10akouОценок пока нет
- TP1-Etau de PlombierДокумент14 страницTP1-Etau de PlombierLucas PagesОценок пока нет
- Désignation Plaquette Et Porte Plaquette ProfДокумент5 страницDésignation Plaquette Et Porte Plaquette Profsaif Saadi100% (2)
- Technologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveДокумент2 страницыTechnologie: Devoir de Contrôle N°1 Section Sciences Techniques ÉpreuveBouabdellaoui saif ennasrОценок пока нет
- 2-Devoir de Controle N1-2AS-2021.31Документ4 страницы2-Devoir de Controle N1-2AS-2021.31Youssef Aouadi100% (1)
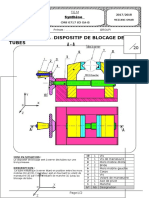
- Devoir de Controle N3-1AS-2014-Blocage Des TubesДокумент3 страницыDevoir de Controle N3-1AS-2014-Blocage Des TubesomatrОценок пока нет
- Les Liaisons Mécaniques: I. Définition III. Degrés de LibertéДокумент2 страницыLes Liaisons Mécaniques: I. Définition III. Degrés de Libertéjawaher100% (2)
- Série de Révision Bac N1 Etude Technologique Part 1Документ20 страницSérie de Révision Bac N1 Etude Technologique Part 1Hamami AymenОценок пока нет
- TP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFДокумент6 страницTP Boite de Vitesses D'un Tour Parallèle 2014 (DR) PDFKarim Kilani100% (2)
- 21 - Le Schéma Cinématique MinimaleДокумент22 страницы21 - Le Schéma Cinématique MinimaleManal El Matmour M'hairОценок пока нет
- Cours Tolérances GEOMETRIQUES 3T-2016-2017Документ6 страницCours Tolérances GEOMETRIQUES 3T-2016-2017yacine yasineОценок пока нет
- Exercices ENSAMДокумент14 страницExercices ENSAMAnass AzamiОценок пока нет
- Devoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFДокумент7 страницDevoir de Synthèse N°1 - Technologie - 2ème Sciences Exp (2018-2019) MR KMIMECH Adel PDFadnenОценок пока нет
- 6 - Bride de SerrageДокумент3 страницы6 - Bride de SerrageElmouden MustaphaОценок пока нет
- CC1 Im1 Ie1 17 18Документ1 страницаCC1 Im1 Ie1 17 18Hamza RimiОценок пока нет
- TD-Poulie Embrayage Centrifuge PFDДокумент5 страницTD-Poulie Embrayage Centrifuge PFDbhsbhs19Оценок пока нет
- TD3 RoulementsДокумент1 страницаTD3 RoulementsSylla BoyzОценок пока нет
- FreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesОт EverandFreeCAD | étape par étape: Apprenez à créer des objets 3D, des assemblages et des dessins techniquesОценок пока нет
- SchematisationДокумент10 страницSchematisationAbdelKarim dergoulОценок пока нет
- Fonction Transmettre Schematisation Et LiaisonsДокумент10 страницFonction Transmettre Schematisation Et LiaisonsHamami AymenОценок пока нет
- Mecanique Appliquee - Resistance Des Materiaux Mecanique Des Fluides ThermodynamiqueДокумент255 страницMecanique Appliquee - Resistance Des Materiaux Mecanique Des Fluides Thermodynamiquedadahagen83% (6)
- Cours 4 S Technologique TunisieДокумент312 страницCours 4 S Technologique Tunisiemechergui92% (12)
- 228358P01Документ137 страниц228358P01MATOUMBA PAULIN0% (1)
- VA N°9 Axe Stratégique Formation Des Formateurs Et Innovation Pédagogique MPДокумент2 страницыVA N°9 Axe Stratégique Formation Des Formateurs Et Innovation Pédagogique MPaurelbayuxОценок пока нет
- Activités 3 S Technologique TunisieДокумент288 страницActivités 3 S Technologique Tunisiemechergui100% (11)
- Formation de Formateurs Avec CGVДокумент11 страницFormation de Formateurs Avec CGVHanane TounsiОценок пока нет
- Cours 4 S Technologique TunisieДокумент312 страницCours 4 S Technologique Tunisiemechergui92% (12)
- Cours Génie Mécanique 3ème AnnéeДокумент272 страницыCours Génie Mécanique 3ème Annéentayoub100% (1)
- Activités 4 S Technologique TunisieДокумент312 страницActivités 4 S Technologique Tunisiemechergui100% (9)
- Transmission de MouvementДокумент111 страницTransmission de Mouvementboujbal100% (2)
- Livre de Cours 2scДокумент159 страницLivre de Cours 2scmohaiii100% (1)
- Livre D Activite 2scДокумент176 страницLivre D Activite 2scmohaiiiОценок пока нет
- Feuilletage 539Документ15 страницFeuilletage 539Hanane TounsiОценок пока нет
- Formation de FormateursДокумент3 страницыFormation de FormateursHanane Tounsi100% (1)
- Formation de Formateurs Avec CGVДокумент11 страницFormation de Formateurs Avec CGVHanane TounsiОценок пока нет
- Cefor Guide Du Formateur Animation de Formation 2013Документ29 страницCefor Guide Du Formateur Animation de Formation 2013Hanane TounsiОценок пока нет
- DI Guide Pratique Scenario PedagogiqueДокумент20 страницDI Guide Pratique Scenario PedagogiqueAhmedZouhairОценок пока нет
- DI Guide Pratique Scenario PedagogiqueДокумент20 страницDI Guide Pratique Scenario PedagogiqueAhmedZouhairОценок пока нет
- Formation de Formateurs Avec CGVДокумент11 страницFormation de Formateurs Avec CGVHanane TounsiОценок пока нет
- Guide Pour La Formation Des Formateurs: Sous-Direction de La Santé de La ReproductionДокумент13 страницGuide Pour La Formation Des Formateurs: Sous-Direction de La Santé de La ReproductionHanane TounsiОценок пока нет
- Proposition D'une Démarche Pour Le Développement Et La Livraison D'un Curriculum de Formation IntégréДокумент6 страницProposition D'une Démarche Pour Le Développement Et La Livraison D'un Curriculum de Formation IntégréHanane TounsiОценок пока нет
- Formation de Formateurs FR 2010Документ44 страницыFormation de Formateurs FR 2010Hanane TounsiОценок пока нет
- Pier RegaudetДокумент254 страницыPier RegaudetHanane TounsiОценок пока нет
- Formation de FormateursДокумент53 страницыFormation de FormateursHanane TounsiОценок пока нет
- Outils Pour Formateur ARC Toolkit - FRДокумент87 страницOutils Pour Formateur ARC Toolkit - FRAdélie Miguel Sierra100% (1)
- Cef 2013-n8-9 035-040 FreДокумент6 страницCef 2013-n8-9 035-040 FreHanane TounsiОценок пока нет
- Fiches Outils FormateursДокумент37 страницFiches Outils FormateursLaetitia Fantozzi100% (2)
- Pier RegaudetДокумент254 страницыPier RegaudetHanane TounsiОценок пока нет
- Proposition D'une Démarche Pour Le Développement Et La Livraison D'un Curriculum de Formation IntégréДокумент6 страницProposition D'une Démarche Pour Le Développement Et La Livraison D'un Curriculum de Formation IntégréHanane TounsiОценок пока нет
- Proposition D'une Démarche Pour Le Développement Et La Livraison D'un Curriculum de Formation IntégréДокумент6 страницProposition D'une Démarche Pour Le Développement Et La Livraison D'un Curriculum de Formation IntégréHanane TounsiОценок пока нет
- SN016 AДокумент8 страницSN016 Asaidgénie01Оценок пока нет
- Etude Concrète Sur Les Moteurs Surunitaire-2Документ4 страницыEtude Concrète Sur Les Moteurs Surunitaire-2Armando JacksonОценок пока нет
- Proline Promag 10 - Mise en Service Condensée - FRДокумент44 страницыProline Promag 10 - Mise en Service Condensée - FRSOURAОценок пока нет
- BAEP 1 - Flexion ComposeeДокумент11 страницBAEP 1 - Flexion ComposeebensofienОценок пока нет
- Corrige L 2016Документ2 страницыCorrige L 2016Khady DiongueОценок пока нет
- DS Grafcet Logique Combinatoire CORRECTIONДокумент7 страницDS Grafcet Logique Combinatoire CORRECTIONchaouch.najeh100% (2)
- M24 Analyse circuit pneum أ©lectropneumatiq-GE-EMIДокумент169 страницM24 Analyse circuit pneum أ©lectropneumatiq-GE-EMIhavoc2012Оценок пока нет
- Catalogue Wiha PDFДокумент381 страницаCatalogue Wiha PDFredaОценок пока нет
- Régression LinéaireДокумент86 страницRégression Linéaireandrytahiry100% (1)
- 1994TH Youssef e NS18471Документ272 страницы1994TH Youssef e NS18471Youness CharihОценок пока нет
- Mov RectilineoДокумент11 страницMov RectilineoALEXANDERОценок пока нет
- Apprendre L' Electronique en Partant de Zéro - Niveau 1 - Leçons 01 À 28Документ297 страницApprendre L' Electronique en Partant de Zéro - Niveau 1 - Leçons 01 À 28fantikomed100% (2)
- Hydraulique Janvier2018Документ131 страницаHydraulique Janvier2018Lengani Kader EvariceОценок пока нет
- Analyse Thermographique Batsale Al PDFДокумент35 страницAnalyse Thermographique Batsale Al PDFAhmed AbenОценок пока нет
- Cours de Chimie OrganiqueДокумент114 страницCours de Chimie Organiqueosefresistance100% (1)
- Traitement Statistique Du SignalДокумент87 страницTraitement Statistique Du SignalAmaniDarwishОценок пока нет
- Ressource VerinsДокумент2 страницыRessource Verinsdxsszsz50% (2)
- A02 Actions Mecaniques Et Forces PDFДокумент3 страницыA02 Actions Mecaniques Et Forces PDFKarimm Karim100% (1)
- Transfo HTДокумент60 страницTransfo HTAbderrahmane BinОценок пока нет
- Physique EB8 Fev1Документ2 страницыPhysique EB8 Fev1Fatima Mahdi100% (3)
- Vérifications ELU Et ELS (Poteau)Документ13 страницVérifications ELU Et ELS (Poteau)Guillaume HounakeОценок пока нет
- Assemblages Par Boulons NormauxДокумент19 страницAssemblages Par Boulons NormauxmohamedagendaОценок пока нет
- Ad Acp3Документ5 страницAd Acp3SioudaОценок пока нет
- Programme de Formation RSA - BAДокумент3 страницыProgramme de Formation RSA - BAAbdel Monaim MaghraouiОценок пока нет
- Cours Murs EcransДокумент50 страницCours Murs EcransmohamedouffaОценок пока нет
- 10 6 TP Dosage de La BétadineДокумент3 страницы10 6 TP Dosage de La BétadinemranonimosОценок пока нет
- Révision Thermo Et EquilibreДокумент4 страницыRévision Thermo Et Equilibrefbch123Оценок пока нет
- Theorie de BetzДокумент2 страницыTheorie de Betzmohammed jadiriОценок пока нет
- Communication MoléculaireДокумент10 страницCommunication MoléculairemnoubirОценок пока нет