Вам также может понравиться
- Engineering Service Revenues World Summary: Market Values & Financials by CountryОт EverandEngineering Service Revenues World Summary: Market Values & Financials by CountryОценок пока нет
- Future: Want Program Programmer That Programmer Unit's of inДокумент9 страницFuture: Want Program Programmer That Programmer Unit's of indinotronОценок пока нет
- AT90S8535 Programmer: Suitable For In-System UseДокумент3 страницыAT90S8535 Programmer: Suitable For In-System UseTariq ZuhlufОценок пока нет
- LTC4006EGN-6, 8.4V2A Li-Ion Battery Charger PDFДокумент1 страницаLTC4006EGN-6, 8.4V2A Li-Ion Battery Charger PDFAndyОценок пока нет
- Invertor LCD OZ9601SДокумент1 страницаInvertor LCD OZ9601SRenatoMaia100% (1)
- Panasonic g50 SchematicsДокумент11 страницPanasonic g50 SchematicsEdgar Jose Aranguibel MorilloОценок пока нет
- Vin Vout: TP13 TP13 TP12 TP12 TP14 TP14 TP15 TP15Документ1 страницаVin Vout: TP13 TP13 TP12 TP12 TP14 TP14 TP15 TP15Varun Kumar ChillaОценок пока нет
- Servo-Motor-238 TascamДокумент1 страницаServo-Motor-238 TascamOKUDA SotaroОценок пока нет
- DVD Noblex Dvd-1350: 3828 Control Borad SechmaticДокумент15 страницDVD Noblex Dvd-1350: 3828 Control Borad SechmaticMariano Ohienart100% (1)
- Op IFДокумент12 страницOp IFdesignОценок пока нет
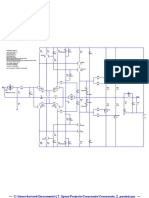
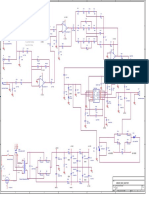
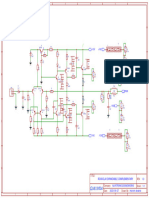
- Crescendo PDFДокумент1 страницаCrescendo PDFindra_idroОценок пока нет
- STEVAL-SPIN3202: STSPIN32F0A Advanced 3-Phase BLDC Driver With Embedded STM32 MCU Single Shunt Evaluation BoardДокумент7 страницSTEVAL-SPIN3202: STSPIN32F0A Advanced 3-Phase BLDC Driver With Embedded STM32 MCU Single Shunt Evaluation Boardedst_tadОценок пока нет
- Mackie Profx16 Usb Codec SchematicДокумент1 страницаMackie Profx16 Usb Codec SchematicRULY BRAMSОценок пока нет
- Mackie ProFX16 USB Codec SchematicДокумент1 страницаMackie ProFX16 USB Codec SchematicJames MontalvoОценок пока нет
- 4 Hilux: ChargingДокумент1 страница4 Hilux: ChargingautocomtrucksОценок пока нет
- Zed BULL SchematicДокумент1 страницаZed BULL SchematicAugustoferreira Ferreira100% (3)
- Mod Apex B500: - C:/Users/GX14000/Desktop/APEX B500 STD TEF - AscДокумент1 страницаMod Apex B500: - C:/Users/GX14000/Desktop/APEX B500 STD TEF - AscLek SarbiniОценок пока нет
- Modelos AntigosДокумент9 страницModelos AntigosGabriel de LimaОценок пока нет
- NCP1203D (203D6) - Ba9741f Ipboard TPV Pwpc1942aua11p (715G1492-1)Документ2 страницыNCP1203D (203D6) - Ba9741f Ipboard TPV Pwpc1942aua11p (715G1492-1)Maria Perez100% (1)
- 100V-240V Woshine Machine Motor Driver-DiagrameДокумент1 страница100V-240V Woshine Machine Motor Driver-DiagrameWasantha MunasinghaОценок пока нет
- Paso A PasaДокумент1 страницаPaso A PasaAlejandro Teruggi100% (1)
- Universitaet Wuppertal, Fb-Esheetmatr - Nr.Namescalesizerevcad-Technikencade (Prof - Dr.-Ing Moelle)Документ1 страницаUniversitaet Wuppertal, Fb-Esheetmatr - Nr.Namescalesizerevcad-Technikencade (Prof - Dr.-Ing Moelle)abdo Zinneddine100% (1)
- PDF Created With Fineprint Pdffactory Trial Version: ZoudangДокумент1 страницаPDF Created With Fineprint Pdffactory Trial Version: ZoudangIgor MОценок пока нет
- PX-680 D06 SchematicДокумент1 страницаPX-680 D06 SchematicReycomlab S.AОценок пока нет
- Untitled2 PDFДокумент1 страницаUntitled2 PDFRenzoRiveroОценок пока нет
- 501 SCHДокумент3 страницы501 SCHLeandro DiasОценок пока нет
- Fuzz Factory 11 Knob Clone Manual V1Документ4 страницыFuzz Factory 11 Knob Clone Manual V1gilgoosОценок пока нет
- SCH - E15 & E25 - Input - A (p1) Iss4 (Phase Inverted + Bar Version) (Schematic Design)Документ1 страницаSCH - E15 & E25 - Input - A (p1) Iss4 (Phase Inverted + Bar Version) (Schematic Design)free_manualОценок пока нет
- Service Manual: Wireless AmplifierДокумент60 страницService Manual: Wireless AmplifiergermieОценок пока нет
- NKS PK5000 PK1000Документ15 страницNKS PK5000 PK1000Flavio de sousa oliveiraОценок пока нет
- NKS PK-5000 PK-1000Документ15 страницNKS PK-5000 PK-1000FRANK NIELE DE OLIVEIRAОценок пока нет
- NKS PK5000 PK1000Документ15 страницNKS PK5000 PK1000Adilson RochaОценок пока нет
- Company Name:Guangzhou Mingo Feijun Electronic Co., LTD Model No: PK 1000Документ15 страницCompany Name:Guangzhou Mingo Feijun Electronic Co., LTD Model No: PK 1000OdimarОценок пока нет
- Psdr2 GuideДокумент1 страницаPsdr2 GuidemarcusОценок пока нет
- NKS PK5000 PK1000Документ15 страницNKS PK5000 PK1000Flavio de sousa oliveiraОценок пока нет
- NKS PK-5000 PK-1000Документ15 страницNKS PK-5000 PK-1000Wagner LucianoОценок пока нет
- NKS PK-5000 PK-1000Документ15 страницNKS PK-5000 PK-1000ala sousa LimaОценок пока нет
- Fonte PL3 EsquematicoДокумент1 страницаFonte PL3 EsquematicoJunior FilhoОценок пока нет
- DS7240V2 Control PanelДокумент6 страницDS7240V2 Control PanelForward MyanmarОценок пока нет
- Micro ScheДокумент1 страницаMicro Schetradingview9339Оценок пока нет
- Installation Instructions For BVT-250 and BVR-250: Introduction To The Series 250Документ3 страницыInstallation Instructions For BVT-250 and BVR-250: Introduction To The Series 250pawa100% (1)
- SIM808 LoNet Design SchematicДокумент1 страницаSIM808 LoNet Design SchematicMcDominiОценок пока нет
- SB2040 SchematicДокумент1 страницаSB2040 Schematiccacalot93100% (1)
- MT1389E DVD Demo BoardДокумент4 страницыMT1389E DVD Demo BoardEnya Andrea Ribba Hernandez100% (1)
- H DVD5031 NДокумент16 страницH DVD5031 NSerp1972Оценок пока нет
- Picprog CircuitДокумент1 страницаPicprog Circuitmiguel709100% (1)
- Bluepill ReforgedДокумент1 страницаBluepill ReforgedDaniel BaronОценок пока нет
- Build-In Leds Usb Type C To Usb 2.0 Usb To Serial (VCP) Lse Oscilator Microcontroller CoreДокумент1 страницаBuild-In Leds Usb Type C To Usb 2.0 Usb To Serial (VCP) Lse Oscilator Microcontroller CorelekobhОценок пока нет
- Low Cost Hitachi VAS 350 SCHДокумент1 страницаLow Cost Hitachi VAS 350 SCHendank baniОценок пока нет
- TOPP PRO TPM6250 Diagrama-72144Документ5 страницTOPP PRO TPM6250 Diagrama-72144garciaromero.miguelantonioОценок пока нет
- Neo400 SCHДокумент1 страницаNeo400 SCHEduardo FingerОценок пока нет
- SA868 OpenДокумент2 страницыSA868 Openmuhammadsubarkah3Оценок пока нет
- RTL9210-VB-CG Demo V203 PDFДокумент5 страницRTL9210-VB-CG Demo V203 PDFCenusa MihaiОценок пока нет
- Con3 Con1 GND - B GND - A U1 LM386 1 2 3: VCC VCCДокумент1 страницаCon3 Con1 GND - B GND - A U1 LM386 1 2 3: VCC VCCMartijn van ToorОценок пока нет
- +VB +VCC: Microlab Technology IncДокумент1 страница+VB +VCC: Microlab Technology IncIgor MОценок пока нет
- Micro SynthesizerДокумент2 страницыMicro Synthesizerdid concombreОценок пока нет
- +VDC +VDC: Quasi NPN Rockola ExpandableДокумент1 страница+VDC +VDC: Quasi NPN Rockola ExpandableDeepak AnandОценок пока нет
- Schematic Rockola Expandable 2022-11-18Документ1 страницаSchematic Rockola Expandable 2022-11-18luckyОценок пока нет
- ChiuДокумент125 страницChiuUjwal JaiswalОценок пока нет
- Promotion Demotion Transfer and Its Impact On Employee Morale in DoordarshanДокумент48 страницPromotion Demotion Transfer and Its Impact On Employee Morale in DoordarshanUjwal JaiswalОценок пока нет
- HR PolicyДокумент60 страницHR PolicyUjwal JaiswalОценок пока нет
- Labour Well FaerДокумент43 страницыLabour Well FaerUjwal JaiswalОценок пока нет
- Somi NaziДокумент121 страницаSomi NaziUjwal JaiswalОценок пока нет
- Motivatinal LevelДокумент59 страницMotivatinal LevelUjwal JaiswalОценок пока нет
- Cohen CGRДокумент4 страницыCohen CGRDurva YerunkarОценок пока нет
- Combine DocumentationДокумент4 страницыCombine DocumentationUjwal JaiswalОценок пока нет
- Certificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheДокумент3 страницыCertificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheUjwal JaiswalОценок пока нет
- ChiuДокумент125 страницChiuUjwal JaiswalОценок пока нет
- ChiuДокумент125 страницChiuUjwal JaiswalОценок пока нет
- Use of Plastic Waste in Construction of Flexible Pavement 8Документ50 страницUse of Plastic Waste in Construction of Flexible Pavement 8Ujwal Jaiswal100% (1)
- Combine DocumentationДокумент4 страницыCombine DocumentationUjwal JaiswalОценок пока нет
- Certificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheДокумент3 страницыCertificate: SYSTEM" Submitted by Miss Priyanka R Shende in Partial Fulfillment of TheUjwal JaiswalОценок пока нет
- Amul ReportДокумент48 страницAmul ReportUjwal JaiswalОценок пока нет
- Include - Stdio.h-Wps OfficeДокумент6 страницInclude - Stdio.h-Wps OfficeUjwal JaiswalОценок пока нет
- Practical No. 12 DMSДокумент4 страницыPractical No. 12 DMSUjwal JaiswalОценок пока нет
- To Study The Customers Satisfaction Towards The Ponds Products at Gondia CityДокумент47 страницTo Study The Customers Satisfaction Towards The Ponds Products at Gondia CityUjwal JaiswalОценок пока нет
- Code On Social Security, 2020Документ11 страницCode On Social Security, 2020Abdul Hudaif100% (1)
- Practical No.11Документ3 страницыPractical No.11Ujwal JaiswalОценок пока нет
- Emami Final 1Документ1 страницаEmami Final 1Ujwal JaiswalОценок пока нет
- A Study On Financial Performance Analysis of The Sundaram Finanace LTDДокумент69 страницA Study On Financial Performance Analysis of The Sundaram Finanace LTDUjwal JaiswalОценок пока нет
- A Study On Financial Performance Analysis of The Sundaram Finanace LTDДокумент69 страницA Study On Financial Performance Analysis of The Sundaram Finanace LTDUjwal JaiswalОценок пока нет
- Algorithm WPS OfficeДокумент1 страницаAlgorithm WPS OfficeUjwal JaiswalОценок пока нет
- Amul ReportДокумент48 страницAmul ReportUjwal JaiswalОценок пока нет
- Solar Grass Cutter 7Документ52 страницыSolar Grass Cutter 7Ujwal Jaiswal100% (1)
- Sugarcane Baggase PROJECT 7Документ54 страницыSugarcane Baggase PROJECT 7Ujwal Jaiswal100% (4)
- To Study The Customers Satisfaction Towards The Amway Products at Gondia CityДокумент43 страницыTo Study The Customers Satisfaction Towards The Amway Products at Gondia CityUjwal JaiswalОценок пока нет
- Concept of Zero Waste 8Документ47 страницConcept of Zero Waste 8Ujwal Jaiswal100% (1)
- Advanced Construction Technique 7Документ51 страницаAdvanced Construction Technique 7Ujwal Jaiswal67% (3)
- Acromag How To Select 4-20 MA IsolatorДокумент9 страницAcromag How To Select 4-20 MA IsolatorRicky PutraОценок пока нет
- Diagnostic Codes Sinotruk HOWO Engines PDFДокумент4 страницыDiagnostic Codes Sinotruk HOWO Engines PDFRandy Staemly Marcella Pacifico100% (4)
- Manual SH Arc-m3-Hub v0400 enДокумент20 страницManual SH Arc-m3-Hub v0400 enhomaОценок пока нет
- DC Power Supply PDFДокумент17 страницDC Power Supply PDFSadia Sultana LikhanОценок пока нет
- Harman Kardon Audio Video 1996-97 en CatalogДокумент16 страницHarman Kardon Audio Video 1996-97 en CatalogenergiculОценок пока нет
- Manual Shop HGM520Документ36 страницManual Shop HGM520Cuan HappyОценок пока нет
- BX1S Chassis Operation ManualДокумент59 страницBX1S Chassis Operation Manualfrancisco mendezОценок пока нет
- Manual - IR Nirvana Troubleshooting GuideДокумент63 страницыManual - IR Nirvana Troubleshooting GuideKurserg92% (51)
- Model Number StructureДокумент12 страницModel Number StructurealexanderОценок пока нет
- SWT300Документ8 страницSWT300yasirОценок пока нет
- Introduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFДокумент8 страницIntroduction To Practical Exercises Using MODICOM 2 ... - LJ Create PDFAnonymous FKMfvCbОценок пока нет
- ZedBoard HW UG v2 2Документ38 страницZedBoard HW UG v2 2satishОценок пока нет
- Ismart Intelligent Relays (V3) : Model Selection GuideДокумент4 страницыIsmart Intelligent Relays (V3) : Model Selection Guidegogu vasileОценок пока нет
- MT6071/8071/8101iE Series: Installation InstructionДокумент2 страницыMT6071/8071/8101iE Series: Installation InstructionsaadОценок пока нет
- Technical Data Sheet NMB24-3Документ3 страницыTechnical Data Sheet NMB24-3Lucas fortunatoОценок пока нет
- Omron Servo MotorДокумент123 страницыOmron Servo MotorAbdul MajeethОценок пока нет
- Aim For Cash ManualДокумент74 страницыAim For Cash ManualyiutkmvjkqОценок пока нет
- Power System Design For High-Power Electric Smelting and Melting FurnacesДокумент16 страницPower System Design For High-Power Electric Smelting and Melting FurnacestatacpsОценок пока нет
- Terrasat IBUC 2e Ku Specification PDFДокумент2 страницыTerrasat IBUC 2e Ku Specification PDFsreipfОценок пока нет
- SR868C8 PDFДокумент43 страницыSR868C8 PDFUltisolarОценок пока нет
- Penko FLEX SeriesДокумент9 страницPenko FLEX SeriesMario vd HeuvelОценок пока нет
- Prodig-5: Explorador Universal de TVДокумент0 страницProdig-5: Explorador Universal de TVStarLink1Оценок пока нет
- Manual t1Документ69 страницManual t1Franco GarciaОценок пока нет
- Se2623l 202397eДокумент11 страницSe2623l 202397eCarlosОценок пока нет
- SP33 M - Oa EdgeДокумент6 страницSP33 M - Oa Edgedavidmontesgarci92Оценок пока нет
- Quiz EDC UNIT 1Документ4 страницыQuiz EDC UNIT 1kalpanadevi0% (1)
- JBL Xtreme 3 GG - Service Manual V1.5Документ60 страницJBL Xtreme 3 GG - Service Manual V1.5delaias.leite100% (2)
- Twido - Programmable Controller - TWDLCAA24DRFДокумент12 страницTwido - Programmable Controller - TWDLCAA24DRFStanley PolancoОценок пока нет
- GB Enerstat V1-0 ManualДокумент87 страницGB Enerstat V1-0 ManualEhsan Rohani0% (1)
- 4046 Optra K 1220 Service ManualДокумент157 страниц4046 Optra K 1220 Service ManualKinder BlackОценок пока нет