Вам также может понравиться
- Grade 10 Book (Maths Quest 10+10A)Документ920 страницGrade 10 Book (Maths Quest 10+10A)sales zf86% (7)
- Linear Algebra With Applications 9th Edition Leon Solutions ManualДокумент32 страницыLinear Algebra With Applications 9th Edition Leon Solutions ManualLafoot BabuОценок пока нет
- M208 HandbookДокумент112 страницM208 HandbookAwf Awf100% (3)
- Matrix Algebra Exercises and Solutions PDFДокумент292 страницыMatrix Algebra Exercises and Solutions PDFVictor Manuel Martinez MoyanoОценок пока нет
- Assignment 1 (2021) - 1Документ8 страницAssignment 1 (2021) - 1sunshine heavenОценок пока нет
- Linear Algebra With Applications Solution ManuelДокумент194 страницыLinear Algebra With Applications Solution Manuelvoldemort260367% (3)
- Linear Control Systems A Textbook For Engineering StudentsДокумент695 страницLinear Control Systems A Textbook For Engineering Studentsعزت عادل عزت محمد100% (2)
- Application of Math Principles To Engineering Problems 11th Edition 7-18-18 PDFДокумент431 страницаApplication of Math Principles To Engineering Problems 11th Edition 7-18-18 PDFWanjiru randolphОценок пока нет
- Hutchison's Elementary and Intermediate Algebra PDFДокумент1 191 страницаHutchison's Elementary and Intermediate Algebra PDFKarumon Utsumi100% (1)
- Percentiles For Grouped Data and Percentile RankДокумент52 страницыPercentiles For Grouped Data and Percentile RankMyrna Miraflor0% (1)
- Matrix of Curriculum Standards (Competencies), With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodДокумент5 страницMatrix of Curriculum Standards (Competencies), With Corresponding Recommended Flexible Learning Delivery Mode and Materials Per Grading PeriodLaivey Ligan Luig Lemeric100% (4)
- Linear Algebra With Applications 8th Edition Leon Solutions ManualДокумент25 страницLinear Algebra With Applications 8th Edition Leon Solutions ManualMorganLoganposxg98% (58)
- Linear Algebra With Applications 8th Edition Leon Solutions ManualДокумент35 страницLinear Algebra With Applications 8th Edition Leon Solutions Manualwoollyprytheeuctw100% (23)
- Solution Manual For Linear Algebra With Applications 9Th Edition Leon 0321962214 9780321962218 Full Chapter PDFДокумент36 страницSolution Manual For Linear Algebra With Applications 9Th Edition Leon 0321962214 9780321962218 Full Chapter PDFjohn.burrington722100% (17)
- MATH-314 Linear Algebra Course OutlinesДокумент4 страницыMATH-314 Linear Algebra Course OutlinesRukaiya AkramОценок пока нет
- Application of Math Principles To Engineering PDFДокумент333 страницыApplication of Math Principles To Engineering PDFEseosa Musa50% (2)
- Matrix Algebra For EngineersДокумент190 страницMatrix Algebra For EngineersYathurshanОценок пока нет
- Numerical Methods For Engineers - Numerical-methods-For-EngineersДокумент217 страницNumerical Methods For Engineers - Numerical-methods-For-Engineerslinfv sjdnfos djfms kjdiОценок пока нет
- Numerical Methods For EngineersДокумент217 страницNumerical Methods For EngineersCIVIL ENGINEERINGОценок пока нет
- Maxtrix Algebra For EngineersДокумент187 страницMaxtrix Algebra For Engineersanon_999497818Оценок пока нет
- Matrix Algebra For EngineersДокумент187 страницMatrix Algebra For Engineersكريم العزاوي100% (1)
- Acing The New Sat Math PDF BookДокумент446 страницAcing The New Sat Math PDF BookAhmed MshrifОценок пока нет
- Matrix Algebra For EngineersДокумент187 страницMatrix Algebra For EngineersAgus LeonardiОценок пока нет
- Matrix Algebra For EngineersДокумент187 страницMatrix Algebra For EngineersMohamed Anis BoumazaОценок пока нет
- Matrix Algebra For EngineersДокумент187 страницMatrix Algebra For EngineersRaj KumarОценок пока нет
- TestДокумент187 страницTestPG ChongОценок пока нет
- Engr 104: Computer Aided Engineering Course SyllabusДокумент4 страницыEngr 104: Computer Aided Engineering Course Syllabusalthawadi2000Оценок пока нет
- MA6251Mathematics - II Notes 2013 RegulationДокумент105 страницMA6251Mathematics - II Notes 2013 RegulationlucasОценок пока нет
- NVH SyllabusДокумент433 страницыNVH Syllabusvhn1988Оценок пока нет
- CHE555 Lesson Plan PDFДокумент6 страницCHE555 Lesson Plan PDFAisyah SarjuniОценок пока нет
- Matrix Algebra For EngineersДокумент142 страницыMatrix Algebra For EngineersppapyydsОценок пока нет
- Matrix Algebra For Engineers: Jeffrey R. ChasnovДокумент143 страницыMatrix Algebra For Engineers: Jeffrey R. ChasnovWaqar Ali SoomroОценок пока нет
- CS1Документ21 страницаCS1zubairashrafОценок пока нет
- Notes MathsДокумент156 страницNotes MathsNitendra KumarОценок пока нет
- SyllabusДокумент2 страницыSyllabusSrikanthОценок пока нет
- Introduction To Numerical Methods and MaДокумент180 страницIntroduction To Numerical Methods and MaRoberto PassadoreОценок пока нет
- Matrix Algebra For EngineersДокумент108 страницMatrix Algebra For EngineersBashar75100% (2)
- Matrix Algebra For Engineers PDFДокумент108 страницMatrix Algebra For Engineers PDFRosella LunaОценок пока нет
- Chapter 2Документ20 страницChapter 2amanuelfitsum589Оценок пока нет
- 103106118Документ343 страницы103106118YasirОценок пока нет
- Question List Fall 2022 (Final)Документ3 страницыQuestion List Fall 2022 (Final)Shahmeer AhmedОценок пока нет
- Numerical & Statistical Anylysis For Cheme's Part1Документ72 страницыNumerical & Statistical Anylysis For Cheme's Part1Fug azОценок пока нет
- 15MA102 Advanced Calculus & Complex AnalysisДокумент3 страницы15MA102 Advanced Calculus & Complex Analysisgurusheker2005Оценок пока нет
- DiffeqДокумент126 страницDiffeqRaghavendra GondabalОценок пока нет
- With Ink ME 581 (1&2) COMPUTER AIDED ANALYSIS AND MODELLING LecturesДокумент54 страницыWith Ink ME 581 (1&2) COMPUTER AIDED ANALYSIS AND MODELLING LecturesCaleb QuaynorОценок пока нет
- MQ9 BookДокумент768 страницMQ9 BookPaulgerОценок пока нет
- Mat 339 Syllabus Fall 2021Документ2 страницыMat 339 Syllabus Fall 2021julioОценок пока нет
- Matlab ManualДокумент65 страницMatlab Manualsm8216415Оценок пока нет
- Numerical Methods For EngineersДокумент236 страницNumerical Methods For Engineersamin bentaherОценок пока нет
- 10 MathsQuest AC 5.1 5.2Документ672 страницы10 MathsQuest AC 5.1 5.2Stu100% (1)
- MATH-314 Linear AlgebraДокумент3 страницыMATH-314 Linear Algebra22011556-035Оценок пока нет
- New Syllabus Mathematics: 8 EditionДокумент154 страницыNew Syllabus Mathematics: 8 EditionGayathiri DeviОценок пока нет
- HTTPS:/WWW Vidyalankar Org/gate/assets/docs/notes/maths PDFДокумент354 страницыHTTPS:/WWW Vidyalankar Org/gate/assets/docs/notes/maths PDFIndra N PatelОценок пока нет
- MAT115 Differential-And-Difference-Equations ETH 1 AC34Документ2 страницыMAT115 Differential-And-Difference-Equations ETH 1 AC34Karan DesaiОценок пока нет
- New Maths Frameworking: Matches The Revised KS3 FrameworkДокумент232 страницыNew Maths Frameworking: Matches The Revised KS3 FrameworkMerihane Naguib100% (2)
- EL220 Signals and Systems: Experiment # 01Документ16 страницEL220 Signals and Systems: Experiment # 01Choudhary Abdul AqeelОценок пока нет
- Kramer +GAUSДокумент36 страницKramer +GAUSbesjana.memaОценок пока нет
- Numerical Methods Lecture 1 PDFДокумент61 страницаNumerical Methods Lecture 1 PDFMike DinhОценок пока нет
- Basic FunctionsДокумент80 страницBasic FunctionsVerayoot1357Оценок пока нет
- MODE Manual Final (06.10.2023)Документ68 страницMODE Manual Final (06.10.2023)hariharankc.23eceОценок пока нет
- School of Engineering and Computer Science Department of Electrical & Electronic EngineeringДокумент7 страницSchool of Engineering and Computer Science Department of Electrical & Electronic EngineeringMD. Akif RahmanОценок пока нет
- 9.5.1-MA5.1-11MG Part 3 Scales and Scale DrawingДокумент27 страниц9.5.1-MA5.1-11MG Part 3 Scales and Scale DrawingDarrenPurtillWrightОценок пока нет
- Annotated BibliographyДокумент8 страницAnnotated BibliographyArbilei de GuzmanОценок пока нет
- SVD ReportДокумент6 страницSVD ReportSagar AhirОценок пока нет
- q6 DSA - Q10Документ6 страницq6 DSA - Q10Sumanth_YedotiОценок пока нет
- Sheet Metal Forming - 2Документ3 страницыSheet Metal Forming - 2HasanBadjrieОценок пока нет
- Quant Checklist 343 by Aashish Arora For Bank Exams 2023Документ91 страницаQuant Checklist 343 by Aashish Arora For Bank Exams 2023kumaripallavi725Оценок пока нет
- Graph TheoryДокумент10 страницGraph TheoryGunjanОценок пока нет
- Example SolutionsДокумент54 страницыExample Solutionsanup312Оценок пока нет
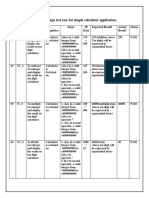
- Experiment No .3-Design Test Case For Simple Calculator ApplicationДокумент2 страницыExperiment No .3-Design Test Case For Simple Calculator ApplicationAbrar NadafОценок пока нет
- Worksheet 1.1 CirclesДокумент2 страницыWorksheet 1.1 CirclesJeypi CeronОценок пока нет
- ManScie (Chap 2)Документ4 страницыManScie (Chap 2)Donna Marie BaluyutОценок пока нет
- Mathematics ReviewerДокумент316 страницMathematics ReviewerHerwin Capiñanes100% (2)
- 441 Lecture 9Документ24 страницы441 Lecture 9Lay Meng HortОценок пока нет
- Business Mathematics ModuleДокумент79 страницBusiness Mathematics ModuleGianina De Leon100% (1)
- 2020june ppr2 Marking SchemeДокумент34 страницы2020june ppr2 Marking SchemeTanakaОценок пока нет
- C Programming Interview Questions and AnswersДокумент58 страницC Programming Interview Questions and AnswersnishaОценок пока нет
- A Ranking Method of Single Valued Neutrosophic Numbers and Its Applications To Multi-Attribute Decision Making ProblemsДокумент14 страницA Ranking Method of Single Valued Neutrosophic Numbers and Its Applications To Multi-Attribute Decision Making ProblemsMia AmaliaОценок пока нет
- Stat - 992Документ16 страницStat - 992Siam ShawОценок пока нет
- Clustering 2Документ80 страницClustering 2shruti katareОценок пока нет
- Solution of The Assignment ProblemДокумент5 страницSolution of The Assignment ProblemMohamed ModerОценок пока нет
- 18BCE10291 - Outliers AssignmentДокумент10 страниц18BCE10291 - Outliers AssignmentvikramОценок пока нет
- Assign 1 12 Feb 19 PDFДокумент2 страницыAssign 1 12 Feb 19 PDFayush SinghОценок пока нет
- Unit - Conic SectionsДокумент34 страницыUnit - Conic Sectionskaloy33100% (1)
- 2C NOTES Polynomial Graphs PDFДокумент7 страниц2C NOTES Polynomial Graphs PDFKauai PauleОценок пока нет
- Math9 LAS Q4 W4Документ6 страницMath9 LAS Q4 W4Jay PeeОценок пока нет
- Coding Mafia Scores: Day 4 PDFДокумент32 страницыCoding Mafia Scores: Day 4 PDFHariniОценок пока нет
- Floating Point RepresentationДокумент18 страницFloating Point RepresentationVishnu BhanderiОценок пока нет
- Pathway Areas: School of Computer Science and EngineeringДокумент31 страницаPathway Areas: School of Computer Science and EngineeringnighatОценок пока нет