Вам также может понравиться
- Me 354 Lab #4: Discussion of The Torsion TestДокумент13 страницMe 354 Lab #4: Discussion of The Torsion TestBhanuka SamarakoonОценок пока нет
- Filament Winding Shape OptimizationДокумент14 страницFilament Winding Shape OptimizationDanielОценок пока нет
- Performance of Three Turbulence ModДокумент12 страницPerformance of Three Turbulence Modkanbur.191Оценок пока нет
- TR3135 - Aircaft Structures AnalysisДокумент17 страницTR3135 - Aircaft Structures AnalysisVăn Sương SỳОценок пока нет
- Mechanics of Materials - Stress Risers in A Cantilever Flexure TestДокумент20 страницMechanics of Materials - Stress Risers in A Cantilever Flexure TestDavid Clark100% (1)
- Stiffness Design of Unbraced Steel Frames: h m n s E I I L P P = total story load Q ψ /h) / /LДокумент3 страницыStiffness Design of Unbraced Steel Frames: h m n s E I I L P P = total story load Q ψ /h) / /LalbertoxinaОценок пока нет
- 05 - Development of Ring Hoop Shear Test For The Mechanical Characterization of Tubular MaterialsДокумент7 страниц05 - Development of Ring Hoop Shear Test For The Mechanical Characterization of Tubular MaterialsAli KhalfallahОценок пока нет
- Problem Set 3Документ4 страницыProblem Set 3ReemALMousawiОценок пока нет
- Article: Stepped Hss T-And Cross - Connections Under Branch In-Plane and Out - Of-Plane BendingДокумент5 страницArticle: Stepped Hss T-And Cross - Connections Under Branch In-Plane and Out - Of-Plane Bendinggv Sathishkumar KumarОценок пока нет
- Mechanics of Materials Laboratory: Stress ConcentrationДокумент24 страницыMechanics of Materials Laboratory: Stress ConcentrationPaulo MeloОценок пока нет
- Fundamental Periods of Moment Frames Using Hand CalculationsДокумент13 страницFundamental Periods of Moment Frames Using Hand CalculationsHenry HoyosОценок пока нет
- Structural Analysis With Strain Gage Measurements: Experiment 1Документ7 страницStructural Analysis With Strain Gage Measurements: Experiment 1Yılmaz GürpınarОценок пока нет
- Sidesway Web Buckling of Steel Beams PDFДокумент12 страницSidesway Web Buckling of Steel Beams PDFabdulloh_99Оценок пока нет
- In IsДокумент17 страницIn IsHùng NguyễnОценок пока нет
- Lab 6 - Wide Flange BeamДокумент4 страницыLab 6 - Wide Flange BeamJanithОценок пока нет
- Ying 2011 A PDFДокумент6 страницYing 2011 A PDFAngel CerriteñoОценок пока нет
- Steel Beam Shear StressДокумент10 страницSteel Beam Shear StressChen Inn TanОценок пока нет
- 1 s2.0 014211239090338F MainДокумент11 страниц1 s2.0 014211239090338F Mainleidiane.costaОценок пока нет
- Practice 4Документ3 страницыPractice 4Hridey GuptaОценок пока нет
- A Fast Wheel-Rail Forces Calculation Computer CodeДокумент13 страницA Fast Wheel-Rail Forces Calculation Computer CodeMattia IaconoОценок пока нет
- SagДокумент6 страницSagLava KumarОценок пока нет
- Active Control With Delay of Vibration and Chaos in A Double-Well Du NG OscillatorДокумент9 страницActive Control With Delay of Vibration and Chaos in A Double-Well Du NG OscillatorCédric KueteОценок пока нет
- Module 8 - Pressure Drawdown TestsДокумент13 страницModule 8 - Pressure Drawdown TestsMuhammad Umair AliОценок пока нет
- Probabilistic assessment of structural safety for gravity damsДокумент6 страницProbabilistic assessment of structural safety for gravity damsRoss ZhouОценок пока нет
- Experimental study validates theoretical design of diagonal cross-bracingsДокумент5 страницExperimental study validates theoretical design of diagonal cross-bracingsJoseph Cristhian Lipa FloresОценок пока нет
- A Cell-Vertex Multigrid Method for the Navier-StokДокумент42 страницыA Cell-Vertex Multigrid Method for the Navier-StokludokellypОценок пока нет
- Isotropic Linear Elastic Stress ConcentrationДокумент19 страницIsotropic Linear Elastic Stress ConcentrationIoan-Lucian StanОценок пока нет
- NC PracticeProblemsДокумент9 страницNC PracticeProblemshamza AslamОценок пока нет
- Moment Influence CoefficientsДокумент23 страницыMoment Influence Coefficientsunix0123Оценок пока нет
- Massachusetts Institute of Technology Department of Mechanical Engineering Cambridge, MA 02139Документ19 страницMassachusetts Institute of Technology Department of Mechanical Engineering Cambridge, MA 02139Jaime GuamanОценок пока нет
- An Elementary Analysis For Predicting The Momentum-And Heat Transfer Characteristics of A Hydraulicaily Rough SurfaceДокумент6 страницAn Elementary Analysis For Predicting The Momentum-And Heat Transfer Characteristics of A Hydraulicaily Rough SurfaceDiego Regaladi MtzОценок пока нет
- TR3136 L01 Nhom2 Week1Документ12 страницTR3136 L01 Nhom2 Week1Văn Sương SỳОценок пока нет
- Calculation of Stresses and Slips in Flexible Armour Layers With Layers InteractionДокумент7 страницCalculation of Stresses and Slips in Flexible Armour Layers With Layers InteractioncidadedoconcretoeacoОценок пока нет
- Mechanics of Materials - Principal Stresses and StrainsДокумент14 страницMechanics of Materials - Principal Stresses and StrainsDavid Clark100% (5)
- Physics QBДокумент61 страницаPhysics QBPraveen KumarОценок пока нет
- System-Level Analysis of Chilled Water Systems Aboard Naval ShipsДокумент6 страницSystem-Level Analysis of Chilled Water Systems Aboard Naval ShipsAlin NanuОценок пока нет
- Derivation of Equations For Conductor and Sag Curves of An Overhead Line Based On A Given Catenary ConstantДокумент5 страницDerivation of Equations For Conductor and Sag Curves of An Overhead Line Based On A Given Catenary ConstantRendiОценок пока нет
- Aerodynamics Open Book Test - Mach Numbers, Nozzles, ShocksДокумент3 страницыAerodynamics Open Book Test - Mach Numbers, Nozzles, ShockskmssaileshОценок пока нет
- Study Set 2Документ7 страницStudy Set 2anteljohnОценок пока нет
- The Stimulation Treatment Pressure Record An Overlooked Formation Evaluation Tool SPE 2287 PAДокумент10 страницThe Stimulation Treatment Pressure Record An Overlooked Formation Evaluation Tool SPE 2287 PABolsec14Оценок пока нет
- SMiRT 25 Paper Dynamic Model - DubykДокумент10 страницSMiRT 25 Paper Dynamic Model - DubykTopNameОценок пока нет
- Vienna 2020Документ82 страницыVienna 2020feñamenОценок пока нет
- E d θ dx d θ dx: Strength Of Ships And Ocean Structures 75Документ17 страницE d θ dx d θ dx: Strength Of Ships And Ocean Structures 75Juan SilvaОценок пока нет
- Matecconf Easn2019 02018Документ8 страницMatecconf Easn2019 02018Bayu Wiyarta YasinОценок пока нет
- Torsion Test Table of ContentsДокумент24 страницыTorsion Test Table of ContentsHanis FarinaОценок пока нет
- Simplified Numerical Modeling of Flow Downstream of an Axial ImpellerДокумент4 страницыSimplified Numerical Modeling of Flow Downstream of an Axial ImpellerVincent RogОценок пока нет
- Cee 456 HW6Документ3 страницыCee 456 HW6moОценок пока нет
- IAS Mains Physics 2005Документ11 страницIAS Mains Physics 2005ajay70233Оценок пока нет
- Maximizing active stockpile capacity for twin bottom tunnel reclaim systemsДокумент3 страницыMaximizing active stockpile capacity for twin bottom tunnel reclaim systemsMOHAMED CHARJAOUIОценок пока нет
- Me Test-2Документ10 страницMe Test-2MAYANKОценок пока нет
- Ten-Deg Off-Axis Test For Shear Properties in Fiber CompositesДокумент8 страницTen-Deg Off-Axis Test For Shear Properties in Fiber CompositesLuis Miguel FerreiraОценок пока нет
- Mechanical Vibrations 4600 431 Example P PDFДокумент84 страницыMechanical Vibrations 4600 431 Example P PDFWilly SusantoОценок пока нет
- HW Questions MidtermДокумент5 страницHW Questions MidtermOnur YalçınkayaОценок пока нет
- 2Документ15 страниц2rakesh biswasОценок пока нет
- A Curved Finite Element For Thin ElasticДокумент38 страницA Curved Finite Element For Thin ElasticJosé Cléber Rodrigues da SilvaОценок пока нет
- DocumentdsdДокумент28 страницDocumentdsdannОценок пока нет
- Impulse_Voltage_Distribution_in_intershield_Disk_Winding_vs_Interleaved_Continuous_Disk_WindingДокумент7 страницImpulse_Voltage_Distribution_in_intershield_Disk_Winding_vs_Interleaved_Continuous_Disk_WindingVerdierОценок пока нет
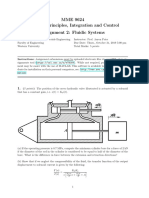
- MME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsДокумент2 страницыMME 9624 Actuator Principles, Integration and Control Assignment 2: Fluidic SystemsKamal PatelОценок пока нет
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОт EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionОценок пока нет
- Lecture 20a - Checking Calculation of The Cross Section of The Big Aspect Ratio WingДокумент8 страницLecture 20a - Checking Calculation of The Cross Section of The Big Aspect Ratio WingJony Oliver Lazo RamosОценок пока нет
- Lecture 06 - Strength Criteria of Structure Elements at Compression PDFДокумент7 страницLecture 06 - Strength Criteria of Structure Elements at Compression PDFJony Oliver Lazo RamosОценок пока нет
- Lecture 11a - Major Factors Influencing On DurabilityДокумент7 страницLecture 11a - Major Factors Influencing On DurabilityJony Oliver Lazo RamosОценок пока нет
- Lecture 10a - The Basic Laws of FatigueДокумент9 страницLecture 10a - The Basic Laws of FatigueJony Oliver Lazo RamosОценок пока нет
- Iast Lect04Документ13 страницIast Lect04Takis ApostolidesОценок пока нет
- Iast Lect06Документ13 страницIast Lect06abhiОценок пока нет
- Lecture 06 - Strength Criteria of Structure Elements at Compression PDFДокумент7 страницLecture 06 - Strength Criteria of Structure Elements at Compression PDFJony Oliver Lazo RamosОценок пока нет
- IAST Lect02 SlidesДокумент14 страницIAST Lect02 SlidesJony Oliver Lazo RamosОценок пока нет
- Change in DimensionsДокумент3 страницыChange in DimensionsJony Oliver Lazo RamosОценок пока нет
- Capitulo 1tension y DeformacionДокумент18 страницCapitulo 1tension y DeformacionJony Oliver Lazo RamosОценок пока нет
- Laboratory Work 8a-Calculation Ultimate Compressing and Ultimate Tension Force For A Finned PanelДокумент5 страницLaboratory Work 8a-Calculation Ultimate Compressing and Ultimate Tension Force For A Finned PanelRocio Del Pilar Bravo SalazarОценок пока нет
- Lecture 19Документ7 страницLecture 19Muhammed SulfeekОценок пока нет
- Experimental Estimation of Critical Stresses in StringerДокумент5 страницExperimental Estimation of Critical Stresses in StringerJony Oliver Lazo RamosОценок пока нет
- Ing. Juan PerezДокумент20 страницIng. Juan PerezJony Oliver Lazo RamosОценок пока нет
- MFG Rpocess & ClassificationДокумент6 страницMFG Rpocess & ClassificationvasanthanilОценок пока нет
- Mechanical Properties of MaterialsДокумент11 страницMechanical Properties of MaterialsThiru MoorthyОценок пока нет
- 4 Simple StressesДокумент25 страниц4 Simple StressesPRASAD326Оценок пока нет
- Lecture 6Документ8 страницLecture 6pmm05479Оценок пока нет
- Mohr's Stress Circle Graphical SolutionДокумент4 страницыMohr's Stress Circle Graphical SolutionJony Oliver Lazo RamosОценок пока нет
- M Aterial Subjected To Combine D Direct and Shear StressesДокумент4 страницыM Aterial Subjected To Combine D Direct and Shear Stressespmm05479Оценок пока нет
- Analysis of Stresses:: X y XyДокумент7 страницAnalysis of Stresses:: X y XyJony Oliver Lazo RamosОценок пока нет
- Analysis of Stersses: General State of Stress at A PointДокумент7 страницAnalysis of Stersses: General State of Stress at A PointJony Oliver Lazo RamosОценок пока нет
- Introduction and Review: PreambleДокумент6 страницIntroduction and Review: PreambleMechanical ZombieОценок пока нет
- Lecture 6Документ8 страницLecture 6pmm05479Оценок пока нет
- Analysis of Stresses:: X y XyДокумент7 страницAnalysis of Stresses:: X y XyJony Oliver Lazo RamosОценок пока нет
- Presses For Sheet Metal WorkingДокумент4 страницыPresses For Sheet Metal WorkingJony Oliver Lazo RamosОценок пока нет
- Principal Strain: Linear Strains: Extension - PositiveДокумент9 страницPrincipal Strain: Linear Strains: Extension - PositiveMechanical ZombieОценок пока нет
- M Aterial Subjected To Combine D Direct and Shear StressesДокумент4 страницыM Aterial Subjected To Combine D Direct and Shear Stressespmm05479Оценок пока нет
- Lecture 8Документ1 страницаLecture 8Sanjeeb MohapatraОценок пока нет
- ANALYSIS OF STRAINSДокумент8 страницANALYSIS OF STRAINSJony Oliver Lazo RamosОценок пока нет
- Group 2Документ3 страницыGroup 2sharmisthahalder21Оценок пока нет
- Ssees DissertationДокумент5 страницSsees DissertationBuyAcademicPapersCanada100% (1)
- PAG 03.1 - Determination of ResistivityДокумент3 страницыPAG 03.1 - Determination of ResistivityjmsonlОценок пока нет
- New Edition ThesisДокумент100 страницNew Edition Thesisniluka welagedaraОценок пока нет
- Draft Certificates Bg. Terang 306 - 7,557. 258mt Mt-2Документ5 страницDraft Certificates Bg. Terang 306 - 7,557. 258mt Mt-2BOBY RAHMAN PURBAОценок пока нет
- HPC - 2022-JIAF - Guide-1.1Документ60 страницHPC - 2022-JIAF - Guide-1.1Emmanuel LompoОценок пока нет
- Act 1 Scene 1 Script 1Документ3 страницыAct 1 Scene 1 Script 1api-551719156Оценок пока нет
- IFIC Bank Share Price FluctuationДокумент7 страницIFIC Bank Share Price FluctuationMakid HasanОценок пока нет
- Wonderland Staking and Minting Calculator (4,4)Документ8 страницWonderland Staking and Minting Calculator (4,4)Dina Maya0% (4)
- Analogs of Quantum Hall Effect Edge States in Photonic CrystalsДокумент23 страницыAnalogs of Quantum Hall Effect Edge States in Photonic CrystalsSangat BaikОценок пока нет
- Sereno's Dissenting Opinion Re TruthCommДокумент35 страницSereno's Dissenting Opinion Re TruthCommGerald MagnoОценок пока нет
- AEF3 File4 TestAДокумент5 страницAEF3 File4 TestAdaniel-XIIОценок пока нет
- International Human Resource Management - A Literature Review PDFДокумент7 страницInternational Human Resource Management - A Literature Review PDFTosin AdelowoОценок пока нет
- Shero Shayari by GhalibДокумент65 страницShero Shayari by GhalibEngr Muhammad Shafeeq NaqeebiОценок пока нет
- Geographic Location SystemsДокумент16 страницGeographic Location SystemsSyed Jabed Miadad AliОценок пока нет
- English Language (1122)Документ26 страницEnglish Language (1122)TD X Mzinda100% (1)
- Tait V MSAD 61 ComplaintДокумент36 страницTait V MSAD 61 ComplaintNEWS CENTER MaineОценок пока нет
- Anthony Browder - The Mysteries of MelaninДокумент4 страницыAnthony Browder - The Mysteries of MelaninHidden Truth82% (11)
- Figures of Speech AND 21 Literary GenresДокумент33 страницыFigures of Speech AND 21 Literary GenresMike AsuncionОценок пока нет
- Augustinian Learning Playlist: Ms. Juvelyn A. Abugan English Grade 9Документ3 страницыAugustinian Learning Playlist: Ms. Juvelyn A. Abugan English Grade 9Jemar Quezon Lifana100% (2)
- 2004 Swamee, Prabhata K. Rathie, Pushpa N. - Exact Solutions For Normal Depth ProblemДокумент9 страниц2004 Swamee, Prabhata K. Rathie, Pushpa N. - Exact Solutions For Normal Depth Problemjosue.angelo9459Оценок пока нет
- Georgethirdearlo 00 WilluoftДокумент396 страницGeorgethirdearlo 00 WilluoftEric ThierryОценок пока нет
- Jean Elizabeth HamptonДокумент3 страницыJean Elizabeth HamptonTamannaОценок пока нет
- Contact: 10 Archana Aboli, Lane 13, V G Kale Path, 850 Bhandarkar Road, Pune-411004Документ12 страницContact: 10 Archana Aboli, Lane 13, V G Kale Path, 850 Bhandarkar Road, Pune-411004immОценок пока нет
- Preparation Total Consecration PDFДокумент872 страницыPreparation Total Consecration PDFgbarcelonОценок пока нет
- Page - 1Документ18 страницPage - 1Julian Adam Pagal75% (4)
- DSP Question Paper April 2012Документ2 страницыDSP Question Paper April 2012Famida Begam100% (1)
- Jurisidiction of MeTC, MTC, MCTC, MuTCДокумент3 страницыJurisidiction of MeTC, MTC, MCTC, MuTCKENEDY FLORESОценок пока нет
- Syllabus Mac1105 M 530 - 8 PM 203080Документ6 страницSyllabus Mac1105 M 530 - 8 PM 203080api-261843361Оценок пока нет
- Anger Child of Fear: How Vulnerability Leads to AngerДокумент2 страницыAnger Child of Fear: How Vulnerability Leads to AngerYeferson PalacioОценок пока нет