Вам также может понравиться
- Integrated Nematode Management: State-of-the-Art and Visions for the FutureОт EverandIntegrated Nematode Management: State-of-the-Art and Visions for the FutureОценок пока нет
- Using Deep Learning For Image-Based Plant Disease Detection: Sharada P. Mohanty, David P. Hughes and Marcel SalathéДокумент10 страницUsing Deep Learning For Image-Based Plant Disease Detection: Sharada P. Mohanty, David P. Hughes and Marcel SalathéShradha VermaОценок пока нет
- Agriculture 12 00742 v3Документ17 страницAgriculture 12 00742 v3Sofi KetemaОценок пока нет
- 9 VII July 2021Документ10 страниц9 VII July 2021Bharath ChicchiОценок пока нет
- An Identification and Detection Process For Wheat Using MLДокумент11 страницAn Identification and Detection Process For Wheat Using MLTefeОценок пока нет
- FieldPlant A Dataset of Field Plant Images For PlaДокумент12 страницFieldPlant A Dataset of Field Plant Images For PlaTendai MatomaОценок пока нет
- Deep Learning For Plant Disease Detection Deep LearningДокумент10 страницDeep Learning For Plant Disease Detection Deep Learningburner123654burnerОценок пока нет
- Phase 2Документ27 страницPhase 2pavitra balundagi80% (5)
- Plant Disease in SugarncaneДокумент20 страницPlant Disease in SugarncaneMalik HashmatОценок пока нет
- A Multi-Plant Disease Diagnosis Method Using Convolutional Neural NetworkДокумент13 страницA Multi-Plant Disease Diagnosis Method Using Convolutional Neural NetworkTefeОценок пока нет
- Agriengineering 03 00032 v2Документ16 страницAgriengineering 03 00032 v2EthvasОценок пока нет
- Plant Leaf Diseases Identification in Deep LearningДокумент13 страницPlant Leaf Diseases Identification in Deep LearningcseijОценок пока нет
- Plant Disease Detection Using AI Based VGG 16 ModelДокумент10 страницPlant Disease Detection Using AI Based VGG 16 ModelPraveen J LОценок пока нет
- Detection of Rice Plant Diease-Journal of Mobile MultimediaДокумент14 страницDetection of Rice Plant Diease-Journal of Mobile MultimediaRaghava ChandranОценок пока нет
- Agronomy 12 02395 v2Документ19 страницAgronomy 12 02395 v2Coffee pasteОценок пока нет
- Comparative Analysis of Transfer Learning LeafNet and Modified LeafNet Models For Accurate Rice Leaf Diseases ClassificationДокумент14 страницComparative Analysis of Transfer Learning LeafNet and Modified LeafNet Models For Accurate Rice Leaf Diseases ClassificationBrain ExОценок пока нет
- Image-Based Tomato Disease Identification Using Convolutional Neural NetworkДокумент7 страницImage-Based Tomato Disease Identification Using Convolutional Neural NetworkSimegnew AsemieОценок пока нет
- Image Recognition of Citrus Diseases Based On Deep Learning: Ech T Press ScienceДокумент10 страницImage Recognition of Citrus Diseases Based On Deep Learning: Ech T Press ScienceAndrés Alfonso Huanca NamucheОценок пока нет
- BP-1-RealTime Plant Health Detection-Deep CNNДокумент26 страницBP-1-RealTime Plant Health Detection-Deep CNNvenkadjegaОценок пока нет
- Anitha - Saranya - 2022 - Cassava Leaf Disease Identification and Detection Using Deep Learning ApproachДокумент7 страницAnitha - Saranya - 2022 - Cassava Leaf Disease Identification and Detection Using Deep Learning Approachbigliang98Оценок пока нет
- Crop Disease Detection Using Machine LearningДокумент24 страницыCrop Disease Detection Using Machine LearningNuramin Fitri Bin AminuddinОценок пока нет
- Base PaperДокумент12 страницBase PapersameenamzОценок пока нет
- Automatic Grape Leaf Diseases Identification Via Unitedmodel Based On Multiple Convolutional Neural NetworksДокумент9 страницAutomatic Grape Leaf Diseases Identification Via Unitedmodel Based On Multiple Convolutional Neural Networksvishalmate10Оценок пока нет
- Research Paper On App-Based Solution To Identify & Solve Disease in PlantsДокумент7 страницResearch Paper On App-Based Solution To Identify & Solve Disease in PlantsIJRASETPublicationsОценок пока нет
- Arti Ficial Intelligence in Agriculture: Ananda S. Paymode Vandana B. MalodeДокумент11 страницArti Ficial Intelligence in Agriculture: Ananda S. Paymode Vandana B. MalodeTefeОценок пока нет
- Using Transfer Learning For Image-Based Cassava Disease DetectionДокумент10 страницUsing Transfer Learning For Image-Based Cassava Disease DetectionEverton Ferreira dos SantosОценок пока нет
- Major AbstarctДокумент2 страницыMajor Abstarctmani MONEYОценок пока нет
- Alguliyev Et Al - 2021 - Plant Disease Detection Based On A Deep ModelДокумент14 страницAlguliyev Et Al - 2021 - Plant Disease Detection Based On A Deep Modelbigliang98Оценок пока нет
- CNN-process-1 (Trivedi2020)Документ10 страницCNN-process-1 (Trivedi2020)Eng Tatt YaapОценок пока нет
- Corn Leaf Disease Classification and Detection Using Deep Convolutional Neural NetworkДокумент26 страницCorn Leaf Disease Classification and Detection Using Deep Convolutional Neural NetworkSaba TahseenОценок пока нет
- 1 s2.0 S2214317320300196 MainДокумент25 страниц1 s2.0 S2214317320300196 MainMotiur RahamanОценок пока нет
- LeafДокумент47 страницLeafHema TОценок пока нет
- 1 s2.0 S2589721721000416 MainДокумент11 страниц1 s2.0 S2589721721000416 MaineuroluarОценок пока нет
- Plant Disease Detection Using CNN TechniquesДокумент5 страницPlant Disease Detection Using CNN TechniquesIJRASETPublicationsОценок пока нет
- Junde Chen Et Al - 2021 - Identification of Rice Plant Diseases Using Lightweight Attention NetworksДокумент13 страницJunde Chen Et Al - 2021 - Identification of Rice Plant Diseases Using Lightweight Attention Networksbigliang98Оценок пока нет
- Plant Leaf Disease Detection Using Deep LearningДокумент6 страницPlant Leaf Disease Detection Using Deep Learningec engineeringОценок пока нет
- Plant Leaf Disease Detection Using Machine LearningДокумент5 страницPlant Leaf Disease Detection Using Machine LearningVishwa Kiccha SudeepОценок пока нет
- Wheat Diseases Classification and Localization Using Convolutional Neural Networks and GradCAM VisualizationДокумент5 страницWheat Diseases Classification and Localization Using Convolutional Neural Networks and GradCAM VisualizationTefeОценок пока нет
- Classification of Mango Leaf Disease by MCNNДокумент14 страницClassification of Mango Leaf Disease by MCNNIJRASETPublicationsОценок пока нет
- Deep Learning in Plant DiseasesДокумент18 страницDeep Learning in Plant DiseasesAtif MahmoodОценок пока нет
- Corn Leaf Disease Detection (The Crop Master)Документ7 страницCorn Leaf Disease Detection (The Crop Master)International Journal of Innovative Science and Research TechnologyОценок пока нет
- Sensors: A Survey of Deep Convolutional Neural Networks Applied For Prediction of Plant Leaf DiseasesДокумент34 страницыSensors: A Survey of Deep Convolutional Neural Networks Applied For Prediction of Plant Leaf DiseasesratnapatilОценок пока нет
- CNN Based Leaf Disease Identification and PDFДокумент5 страницCNN Based Leaf Disease Identification and PDFKrishna KrishОценок пока нет
- IJRPR14146Документ6 страницIJRPR14146Gumar YuОценок пока нет
- Plant Disease Recognition Using Deep Learning TechniquesДокумент16 страницPlant Disease Recognition Using Deep Learning TechniquesSivadi BalakrishnaОценок пока нет
- A Review Paper On Plant Disease Detection and Recognition by Using Deep LearningДокумент7 страницA Review Paper On Plant Disease Detection and Recognition by Using Deep LearningIJRASETPublicationsОценок пока нет
- v1 CoveredДокумент17 страницv1 CoveredTefeОценок пока нет
- Crop Disease Detection SystemДокумент57 страницCrop Disease Detection SystemUsha Lokesh0% (1)
- Plant Disease Diagnosis and Image Classification Using Deep LearningДокумент16 страницPlant Disease Diagnosis and Image Classification Using Deep LearningSanjay KumarОценок пока нет
- Plant Disease Detection Using Deep LearningДокумент7 страницPlant Disease Detection Using Deep LearningIJRASETPublicationsОценок пока нет
- Maize Crop Disease Detection Using CNN: OntextДокумент3 страницыMaize Crop Disease Detection Using CNN: Ontextsunilkumarkn26Оценок пока нет
- An Agricultural IoT System To Accurately Reconize Crop DiseasesДокумент13 страницAn Agricultural IoT System To Accurately Reconize Crop DiseasesAbirОценок пока нет
- Automated Identification of Northern Leaf Blight-Infected Maize Plantsfrom Field Imagery Using Deep LearningДокумент7 страницAutomated Identification of Northern Leaf Blight-Infected Maize Plantsfrom Field Imagery Using Deep Learningzoric99Оценок пока нет
- Identification of Cucumber Leaf Diseases Using DeeДокумент13 страницIdentification of Cucumber Leaf Diseases Using DeearpanmalewarОценок пока нет
- Pathogens 11 01248Документ13 страницPathogens 11 01248Ngọc Minh Anh NguyễnОценок пока нет
- Early Disease Classification of Mango Leaves Using Feed-Forward Neural NetworkДокумент14 страницEarly Disease Classification of Mango Leaves Using Feed-Forward Neural NetworkJuan PalaciosОценок пока нет
- Plant Disease Detection Using CNNДокумент12 страницPlant Disease Detection Using CNNhkkjh100% (1)
- Crop Disease Identification Using Deep Learning TechniquesДокумент7 страницCrop Disease Identification Using Deep Learning TechniquesInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Frai 05 733345Документ11 страницFrai 05 733345equalizertechmasterОценок пока нет
- Lu Et Al - 2021 - Review On Convolutional Neural Network (CNN) Applied To Plant Leaf DiseaseДокумент18 страницLu Et Al - 2021 - Review On Convolutional Neural Network (CNN) Applied To Plant Leaf Diseasebigliang98Оценок пока нет
- Austsignpostmathsnsw sb9 5.1-3 00Документ24 страницыAustsignpostmathsnsw sb9 5.1-3 00Minus Venus0% (3)
- Betriebsanleitung SM-RI-X - Q-75 Rev2Документ65 страницBetriebsanleitung SM-RI-X - Q-75 Rev2ABDULSALAMОценок пока нет
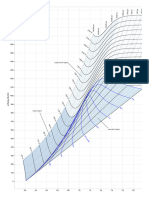
- Mollier Enthalpy Entropy Chart For Steam - US UnitsДокумент1 страницаMollier Enthalpy Entropy Chart For Steam - US Unitslin tongОценок пока нет
- Opatch AutoДокумент2 страницыOpatch Autoshuvo_ami24Оценок пока нет
- Reaktor 5 Core Manual EnglishДокумент210 страницReaktor 5 Core Manual EnglishmonistoОценок пока нет
- ML Observability Build Vs Buy Download Guide 1689038317Документ31 страницаML Observability Build Vs Buy Download Guide 1689038317rastrol7Оценок пока нет
- Reverse Engineering Cheat SheetДокумент1 страницаReverse Engineering Cheat Sheetalfredhitchcock_007100% (2)
- 1982 International Rectifier Hexfet Databook PDFДокумент472 страницы1982 International Rectifier Hexfet Databook PDFetmatsudaОценок пока нет
- Numerical ModelДокумент61 страницаNumerical ModelAlbert AguileraОценок пока нет
- Circuit Protective Devices: Learner Work BookДокумент41 страницаCircuit Protective Devices: Learner Work BookChanel Maglinao80% (5)
- Analiza Procesa Ocenjivanja Na Časovima Matematike - BaucalДокумент22 страницыAnaliza Procesa Ocenjivanja Na Časovima Matematike - BaucalНевенка ЈовановићОценок пока нет
- EXCEL - How To Write Perfect VLOOKUP and INDEX and MATCH FormulasДокумент29 страницEXCEL - How To Write Perfect VLOOKUP and INDEX and MATCH Formulasgerrydimayuga100% (1)
- Data Download CMM366A-4G V1.0 enДокумент16 страницData Download CMM366A-4G V1.0 enSuramanОценок пока нет
- Origin and Structure of The EarthДокумент8 страницOrigin and Structure of The EarthRobin Suarez ViladoОценок пока нет
- Physics Sample Question PaperДокумент9 страницPhysics Sample Question PaperVarsha SharmaОценок пока нет
- NumaticsFRLFlexiblokR072010 EsДокумент40 страницNumaticsFRLFlexiblokR072010 EsGabriel San Martin RifoОценок пока нет
- Rr410209 High Voltage EngineeringДокумент7 страницRr410209 High Voltage EngineeringSrinivasa Rao GОценок пока нет
- Nolte KitchenДокумент44 страницыNolte KitchenGanesh SОценок пока нет
- Calculation Eurocode 2Документ4 страницыCalculation Eurocode 2rammirisОценок пока нет
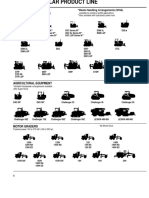
- Caterpillar Product Line 13Документ7 страницCaterpillar Product Line 13GenneraalОценок пока нет
- Beginners Tutorial: Issue Status/Number - 1.0 Issue Date - 10 November, 2002Документ17 страницBeginners Tutorial: Issue Status/Number - 1.0 Issue Date - 10 November, 2002nathulalusaОценок пока нет
- 6545 Us35000Документ4 страницы6545 Us35000Rafael BarrosОценок пока нет
- Form in MusicДокумент8 страницForm in MusicAndri KurniawanОценок пока нет
- Experimental Techniques For Low Temperature Measurements PDFДокумент2 страницыExperimental Techniques For Low Temperature Measurements PDFVanessaОценок пока нет
- Study of Padmanabhapuram Palace TrivandrumДокумент14 страницStudy of Padmanabhapuram Palace Trivandrumcrustybubbles100% (2)
- Valence Bond Theory VBTДокумент32 страницыValence Bond Theory VBTAsif AhnafОценок пока нет
- Coding Assignment 18-WPS OfficeДокумент9 страницCoding Assignment 18-WPS Officetamj tamjОценок пока нет
- Case StudyДокумент10 страницCase StudyVintage ArtОценок пока нет
- Mathematical Analysisand Optimizationfor EconomistsДокумент4 страницыMathematical Analysisand Optimizationfor EconomistsGuillermo GómezОценок пока нет
- WhiteLED1 8Документ12 страницWhiteLED1 8Smyle KatariaОценок пока нет