Вам также может понравиться
- Phison ManualДокумент32 страницыPhison Manualmaxo1100% (1)
- William Stallings Computer Organization and Architecture 8 EditionДокумент62 страницыWilliam Stallings Computer Organization and Architecture 8 EditionMD. MAHIR ABRAR KHANОценок пока нет
- Arsitektur Komputer (Sistem Bus)Документ51 страницаArsitektur Komputer (Sistem Bus)Dianne HarrisОценок пока нет
- Computer Architecture and OrganizationДокумент61 страницаComputer Architecture and OrganizationPoornima EgОценок пока нет
- Part 04: Designing For Performance: Prof. Aaradhana DeshmukhДокумент55 страницPart 04: Designing For Performance: Prof. Aaradhana Deshmukhmadhursen99Оценок пока нет
- Ch3 PDFДокумент62 страницыCh3 PDFtesfu zewduОценок пока нет
- William Stallings Computer Organization and Architecture 7 EditionДокумент55 страницWilliam Stallings Computer Organization and Architecture 7 EditionAthreyaОценок пока нет
- 03 - Top Level View of Computer Function and InterconnectionДокумент50 страниц03 - Top Level View of Computer Function and Interconnectiondommy omosaОценок пока нет
- William Stallings Computer Organization and Architecture 6 Edition System BusesДокумент54 страницыWilliam Stallings Computer Organization and Architecture 6 Edition System BusesNiloy RahmanОценок пока нет
- William Stallings Computer Organization and Architecture 6 Edition System BusesДокумент58 страницWilliam Stallings Computer Organization and Architecture 6 Edition System BusesDr-Raghad Al-FahamОценок пока нет
- William Stallings Computer Organization and Architecture 6 Edition System BusesДокумент54 страницыWilliam Stallings Computer Organization and Architecture 6 Edition System BusesAhmed Hassan MohammedОценок пока нет
- A Top-Level View of Computer Function and InterconnectionДокумент56 страницA Top-Level View of Computer Function and InterconnectionVERY YOGA MARULI TUA SIHOMBING TBAОценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition System BusesДокумент55 страницWilliam Stallings Computer Organization and Architecture 7 Edition System BusespuyОценок пока нет
- William Stallings Computer Organization and Architecture 7 EditionДокумент55 страницWilliam Stallings Computer Organization and Architecture 7 EditionMuhammad WildanОценок пока нет
- William Stallings Computer Architecture 8 Edition: Top Level View of Computer Function and InterconnectionДокумент55 страницWilliam Stallings Computer Architecture 8 Edition: Top Level View of Computer Function and Interconnectionmeriem bahaОценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition System BusesДокумент55 страницWilliam Stallings Computer Organization and Architecture 7 Edition System BusesLeandro MansillaОценок пока нет
- BusesДокумент55 страницBusesWajahat HussainОценок пока нет
- 03 - Top Level View of Computer Function and InterconnectionДокумент55 страниц03 - Top Level View of Computer Function and Interconnectionjanray1988Оценок пока нет
- William Stallings Computer Organization and Architecture 7 EditionДокумент47 страницWilliam Stallings Computer Organization and Architecture 7 EditionMeena ShahОценок пока нет
- El ProcesadorДокумент58 страницEl ProcesadorCarlos Jesus Koo LabrinОценок пока нет
- 03 - Top Level View of Computer Function and InterconnectionДокумент44 страницы03 - Top Level View of Computer Function and InterconnectionMAHNOOR ATIFОценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition System BusesДокумент39 страницWilliam Stallings Computer Organization and Architecture 7 Edition System BusesMurtaza JamaliОценок пока нет
- William Stallings Computer Organization and Architecture 6 Edition System BusesДокумент55 страницWilliam Stallings Computer Organization and Architecture 6 Edition System BusesHassan MansoorОценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition System BusesДокумент47 страницWilliam Stallings Computer Organization and Architecture 7 Edition System BusesAjmal KhanОценок пока нет
- LectureSeries3 - BusesДокумент19 страницLectureSeries3 - BusesLamar ArnoldОценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition System BusesДокумент40 страницWilliam Stallings Computer Organization and Architecture 7 Edition System BusesUsman khanОценок пока нет
- ECEG-3202 Computer Architecture and Organization: Top Level View of Computer Function and InterconnectionДокумент36 страницECEG-3202 Computer Architecture and Organization: Top Level View of Computer Function and Interconnectionδιρορα δρОценок пока нет
- ECEG-3202 Computer Architecture and Organization: Top Level View of Computer Function and InterconnectionДокумент36 страницECEG-3202 Computer Architecture and Organization: Top Level View of Computer Function and InterconnectionESTIFANOS NegaОценок пока нет
- 03N - Top Level View of Computer Function and InterconnectionДокумент38 страниц03N - Top Level View of Computer Function and InterconnectionDoc TelОценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition System BusesДокумент50 страницWilliam Stallings Computer Organization and Architecture 7 Edition System BusesRubeshan ShanОценок пока нет
- 03 - Top Level View of Computer Function and InterconnectionДокумент32 страницы03 - Top Level View of Computer Function and InterconnectionflowrentsiaОценок пока нет
- Introduction To ComputerДокумент47 страницIntroduction To ComputerPradhyumn ShetTilveОценок пока нет
- A Top-Level View of Computer Function and InterconnectionДокумент61 страницаA Top-Level View of Computer Function and InterconnectionBisma NusaОценок пока нет
- William Stallings Computer Organization and Architecture 8 EditionДокумент52 страницыWilliam Stallings Computer Organization and Architecture 8 EditionabbasОценок пока нет
- 03 - Top Level View of Computer Function and InterconnectionДокумент64 страницы03 - Top Level View of Computer Function and Interconnectionbree789Оценок пока нет
- Top Level View of Computer Function and InterconnectionДокумент62 страницыTop Level View of Computer Function and InterconnectionAhsan JameelОценок пока нет
- William Stallings Computer Organization and Architecture 6 Edition System BusesДокумент34 страницыWilliam Stallings Computer Organization and Architecture 6 Edition System BusesShakeel AwanОценок пока нет
- Buses and InterconnectionДокумент32 страницыBuses and Interconnectionather_88100% (1)
- Sytem BusДокумент24 страницыSytem BusRam RamОценок пока нет
- Computer Architecture and Organization (Eeng 3192)Документ34 страницыComputer Architecture and Organization (Eeng 3192)Esuyawkal AdugnaОценок пока нет
- Coa 03 Function InterconnectionДокумент61 страницаCoa 03 Function Interconnectionmuhammad farooqОценок пока нет
- Lesson 3 - Top Level View of Computer Function and InterconnectionДокумент74 страницыLesson 3 - Top Level View of Computer Function and InterconnectionParadise TheKingОценок пока нет
- 03 - Top Level View of Computer Function and InterconnectionДокумент74 страницы03 - Top Level View of Computer Function and InterconnectionDagmawiОценок пока нет
- 07 Input OutputДокумент63 страницы07 Input Outputdeepak joshiОценок пока нет
- William Stallings Computer Organization and Architecture 8 Edition Input/OutputДокумент63 страницыWilliam Stallings Computer Organization and Architecture 8 Edition Input/Outputtesos ganulОценок пока нет
- William Stallings Computer Organization and Architecture 7 Edition Input/OutputДокумент63 страницыWilliam Stallings Computer Organization and Architecture 7 Edition Input/OutputAndi Didik Wira PutraОценок пока нет
- Ca Module 1Документ28 страницCa Module 1Devan KaladharanОценок пока нет
- William Stallings Computer Organization and Architecture 8 Edition Input/OutputДокумент65 страницWilliam Stallings Computer Organization and Architecture 8 Edition Input/OutputUmar IftikharОценок пока нет
- 07 Input OutputДокумент63 страницы07 Input OutputJuNaid QaimkhaniОценок пока нет
- CH 03 p2 BusStructureДокумент37 страницCH 03 p2 BusStructureAnanda Haykel IskandarОценок пока нет
- Week 3 18032022 040218pmДокумент47 страницWeek 3 18032022 040218pmmisbah AbidОценок пока нет
- 07 - Input OutputДокумент62 страницы07 - Input OutputAbdukadir AbdullahОценок пока нет
- William Stallings Computer Organization and Architecture 8 EditionДокумент55 страницWilliam Stallings Computer Organization and Architecture 8 EditionflowrentsiaОценок пока нет
- William Stallings Computer Organization and Architecture 6 Edition System BusesДокумент29 страницWilliam Stallings Computer Organization and Architecture 6 Edition System BusesPritam SirpotdarОценок пока нет
- Lecture-03, Adv. Computer Architecture, CS-522Документ62 страницыLecture-03, Adv. Computer Architecture, CS-522torabgullОценок пока нет
- William Stallings Computer Organization and Architecture 6 Edition Input/OutputДокумент56 страницWilliam Stallings Computer Organization and Architecture 6 Edition Input/OutputroseОценок пока нет
- Computer Organization and ArchitectureДокумент52 страницыComputer Organization and ArchitectureMohammad Hussain AfridiОценок пока нет
- Preliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960От EverandPreliminary Specifications: Programmed Data Processor Model Three (PDP-3) October, 1960Оценок пока нет
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesОт EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesОценок пока нет
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.От EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Оценок пока нет
- BECKHOFF New Automation Technology PLCДокумент2 страницыBECKHOFF New Automation Technology PLCDaniela Maldonado VeraОценок пока нет
- Product Support Guide: D197/D198/D199/D200/D201/D202Документ46 страницProduct Support Guide: D197/D198/D199/D200/D201/D202Jose Abraham Grovas VelezОценок пока нет
- Lesson B Generations of ComputerДокумент30 страницLesson B Generations of ComputerSitsiritsit AlibangbangОценок пока нет
- Product Selection Guide: LCD, Memory and StorageДокумент28 страницProduct Selection Guide: LCD, Memory and StorageSerkan AktaşОценок пока нет
- Steren Usb Serial DriverДокумент3 страницыSteren Usb Serial DriverMauro Portugal LagardaОценок пока нет
- RS984 - BEX-T1 Spec SHTДокумент2 страницыRS984 - BEX-T1 Spec SHTAqui FrkОценок пока нет
- Memory SystemДокумент70 страницMemory SystemritikОценок пока нет
- Scheme of Work ICTL Form 1Документ7 страницScheme of Work ICTL Form 1ma'ein100% (3)
- 7606Документ464 страницы7606NiteshОценок пока нет
- Manual Srp-330 User English Rev 1 06Документ24 страницыManual Srp-330 User English Rev 1 06Sshan_Ng_2088Оценок пока нет
- Siemens S7 PLC and VLT 5000 ProfibusДокумент6 страницSiemens S7 PLC and VLT 5000 ProfibusPassenger MedeamОценок пока нет
- Machine Language For The Commodore Revised and Expanded Edition PDFДокумент396 страницMachine Language For The Commodore Revised and Expanded Edition PDFDusun PanembongОценок пока нет
- System Diagram RushMoreДокумент4 страницыSystem Diagram RushMoreJorge Luis Ruiz GutierrezОценок пока нет
- Prevent Overheating: Configurable TDPДокумент4 страницыPrevent Overheating: Configurable TDPMadhuraОценок пока нет
- Kyocera TASKalfa 3501i BrochureДокумент8 страницKyocera TASKalfa 3501i Brochuretaunweer2Оценок пока нет
- EE6008 MBSDДокумент34 страницыEE6008 MBSDHans John D'cruzОценок пока нет
- Maintenance and Service Guide: HP Compaq nc8000 Business Notebook HP Compaq nw8000 Mobile WorkstationДокумент189 страницMaintenance and Service Guide: HP Compaq nc8000 Business Notebook HP Compaq nw8000 Mobile WorkstationGlen GadowskiОценок пока нет
- NtbtlogДокумент18 страницNtbtlogemersonbspo00Оценок пока нет
- Convert ASCII Characters To Keyboard Scan CodesДокумент3 страницыConvert ASCII Characters To Keyboard Scan Codesejmelchiors100% (1)
- Xerox Workcentre 5765 / 5775 / 5790 Multifunction Printer: Raise Your Productivity, Reduce Costs, Stay SecureДокумент8 страницXerox Workcentre 5765 / 5775 / 5790 Multifunction Printer: Raise Your Productivity, Reduce Costs, Stay SecurememoarfaaОценок пока нет
- Sections 3.2 and 3.3 Dynamic Scheduling - Tomasulo's AlgorithmДокумент53 страницыSections 3.2 and 3.3 Dynamic Scheduling - Tomasulo's AlgorithmvpsampathОценок пока нет
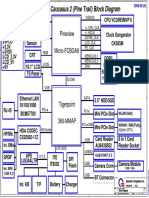
- Lenovo IdeaPad S10 - QUANTA FL2 - REV 1ASec PDFДокумент36 страницLenovo IdeaPad S10 - QUANTA FL2 - REV 1ASec PDFu3a96e na1susОценок пока нет
- Computer Arcitecture: Lecture Data Path by Engr. Saleem Afzal Dhillu Class: BS-CS The University of GujratДокумент36 страницComputer Arcitecture: Lecture Data Path by Engr. Saleem Afzal Dhillu Class: BS-CS The University of GujratRabia ChaudharyОценок пока нет
- Input & Output DevicesДокумент16 страницInput & Output Devicesapi-3815468100% (2)
- Practical 8 Call and SubroutineДокумент5 страницPractical 8 Call and SubroutineHet Patel50% (2)
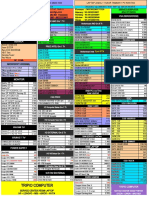
- 3 PC Rakitan, Printer Tinta 14 Maret 2023Документ2 страницы3 PC Rakitan, Printer Tinta 14 Maret 2023IT RSKBJATWINОценок пока нет
- Manual Driver USB To RS232Документ1 страницаManual Driver USB To RS232Mochamad FarizОценок пока нет
- IT1353 Embedded SystemДокумент6 страницIT1353 Embedded SystemReeshma ApОценок пока нет
- HP / Compaq Laptop Batteries & ChargersДокумент12 страницHP / Compaq Laptop Batteries & ChargersyourdiscountstoreОценок пока нет