Вам также может понравиться
- Preschool Printable Writing PatternsДокумент11 страницPreschool Printable Writing PatternsFayyaz Nadeem0% (1)
- Alphabet Worksheets From A To ZДокумент28 страницAlphabet Worksheets From A To ZFadi Al Shhayed100% (1)
- 309-Understanding Basic PneumaticsДокумент160 страниц309-Understanding Basic PneumaticsatagucaОценок пока нет
- Fluid LabДокумент19 страницFluid LabFu HongОценок пока нет
- Motion of Particles in FluidДокумент26 страницMotion of Particles in FluidSubakti HungОценок пока нет
- EMG 2505 - Measurement and Instrumentation PDFДокумент159 страницEMG 2505 - Measurement and Instrumentation PDFVasda VinciОценок пока нет
- Automatic Solar Tracker SystemДокумент8 страницAutomatic Solar Tracker SystemAbhay TiwariОценок пока нет
- Staircase Climbing TrollyДокумент47 страницStaircase Climbing TrollySathish Royalraja75% (4)
- Intelligent Solar Tracker System Implemented On 8051 MicrocontrollerДокумент5 страницIntelligent Solar Tracker System Implemented On 8051 MicrocontrollerseventhsensegroupОценок пока нет
- Chapter No. Description Page No.: 1.1 Block Diagram 3Документ69 страницChapter No. Description Page No.: 1.1 Block Diagram 3Deekshith Ram50% (2)
- Labvolt Todas Las Practicas Cwa8001Документ70 страницLabvolt Todas Las Practicas Cwa8001Yorgos J. Ramirez PОценок пока нет
- EE658A Assignment 6Документ14 страницEE658A Assignment 6sai kОценок пока нет
- Real-Time Monitoring Security System Integrated With Raspberry Pi and E-Mail Communication LinkДокумент12 страницReal-Time Monitoring Security System Integrated With Raspberry Pi and E-Mail Communication LinkIJRASETPublicationsОценок пока нет
- Applications of 8051 MicrocontrollersДокумент23 страницыApplications of 8051 MicrocontrollersUsama Spiffy100% (1)
- Universiti Teknologi Mara Final Examination: Confidential EM/JAN 2012/MEM561/KJP516/470Документ4 страницыUniversiti Teknologi Mara Final Examination: Confidential EM/JAN 2012/MEM561/KJP516/470Nasri JamaludinОценок пока нет
- Chapter 3 - Choppers - PDFДокумент75 страницChapter 3 - Choppers - PDFZahidullah100% (1)
- Earthquake Geotechnical Engineering PDFДокумент339 страницEarthquake Geotechnical Engineering PDFChin Thau WuiОценок пока нет
- Porosity Reduction and Mechanical Properties Improvement in Die Cast Engine Blocks (Pub Year) Materials Science and Engineering AДокумент7 страницPorosity Reduction and Mechanical Properties Improvement in Die Cast Engine Blocks (Pub Year) Materials Science and Engineering AgiokniessОценок пока нет
- Chapter 2 - FIR Filters - Digital Filter DesignДокумент100 страницChapter 2 - FIR Filters - Digital Filter DesignSanjay BalwaniОценок пока нет
- Window Function ComparisonsДокумент7 страницWindow Function ComparisonsHaripriya RadhakrishnanОценок пока нет
- Universiti Teknologi Mara Final Examination: Confidential EM/JAN 2013/MEM560Документ5 страницUniversiti Teknologi Mara Final Examination: Confidential EM/JAN 2013/MEM560Shah GrungeОценок пока нет
- Techno-Environmental Feature-Based Sun Tracking Model Fabrication & Optimal Analyses by Precise Position AlgorithmДокумент9 страницTechno-Environmental Feature-Based Sun Tracking Model Fabrication & Optimal Analyses by Precise Position AlgorithmInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Monitoring and Control of Solar Power System Using Reliance SCADAДокумент4 страницыMonitoring and Control of Solar Power System Using Reliance SCADAEditor IJTSRDОценок пока нет
- Problem Filter Design 1Документ22 страницыProblem Filter Design 1ShivMeenaОценок пока нет
- Universiti Teknologi Mara Final Examination: Confidential EM/JUN2012/MEM560Документ5 страницUniversiti Teknologi Mara Final Examination: Confidential EM/JUN2012/MEM560Muhammad FirdawsОценок пока нет
- Universiti Teknologi Mara Final Examination: Confidential EM/JAN 2012/MEM560Документ5 страницUniversiti Teknologi Mara Final Examination: Confidential EM/JAN 2012/MEM560Muhammad FirdawsОценок пока нет
- FIR Using Window MethodДокумент24 страницыFIR Using Window MethodModyKing99Оценок пока нет
- Integrated Mobile Surveillance and Wireless Sensor SystemДокумент10 страницIntegrated Mobile Surveillance and Wireless Sensor SystemARVIND100% (1)
- Control of A Four Level Elevator System Using A Programmable Logic Controller Experiment No 4 PDFДокумент16 страницControl of A Four Level Elevator System Using A Programmable Logic Controller Experiment No 4 PDFFayyaz NadeemОценок пока нет
- Fundamental Understanding of The Physics of A Small-Scale Vertical Axis Wind Turbine With Dynamic Blade Pitching: An Experimental and Computational ApproachДокумент21 страницаFundamental Understanding of The Physics of A Small-Scale Vertical Axis Wind Turbine With Dynamic Blade Pitching: An Experimental and Computational Approachmtl0612Оценок пока нет
- Robotics and AutomationДокумент4 страницыRobotics and AutomationTemitayo Olutimi EjidokunОценок пока нет
- Solar Powered Mobile Operated Smart Multifunction Agriculture RobotДокумент4 страницыSolar Powered Mobile Operated Smart Multifunction Agriculture RobotVIVA-TECH IJRIОценок пока нет
- How Does A PID Controller Work - Structure & Tuning MethodsДокумент12 страницHow Does A PID Controller Work - Structure & Tuning Methodsmurugan1984Оценок пока нет
- Bank Token Display SystemДокумент22 страницыBank Token Display Systemsandy_18_sn5879Оценок пока нет
- C++ Revision Tour Long QuestionsДокумент17 страницC++ Revision Tour Long Questionsmehak2106Оценок пока нет
- Lab 9 TransistorДокумент8 страницLab 9 TransistorChing Wai YongОценок пока нет
- Steady State ErrorsДокумент13 страницSteady State ErrorsChetan KotwalОценок пока нет
- LED Flasher Circuit ExplanationДокумент5 страницLED Flasher Circuit ExplanationBharathОценок пока нет
- Scilab ProgramsДокумент47 страницScilab ProgramsNatraj Anita Prabhurao HulsureОценок пока нет
- Staircase Climbing Trolley PDFДокумент7 страницStaircase Climbing Trolley PDFSelvakumarОценок пока нет
- Adaptive Lighting For AutomobileДокумент18 страницAdaptive Lighting For Automobilekavitha mОценок пока нет
- Addressing The Causes That Hinder Effective English Language Teaching in Saudi Universities: A Case StudyДокумент36 страницAddressing The Causes That Hinder Effective English Language Teaching in Saudi Universities: A Case StudyChoudhary Zahid JavidОценок пока нет
- Malaysian Studies Exam Tips Tri 1 1011Документ45 страницMalaysian Studies Exam Tips Tri 1 1011Karthik100% (1)
- LTspice Lecture326Документ37 страницLTspice Lecture326adadnnnnn100% (1)
- Assignment 2Документ5 страницAssignment 2aiao90Оценок пока нет
- Design & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemДокумент5 страницDesign & Implementation of Mamdani Fuzzy Inference System On An Automatic Train Braking SystemijsretОценок пока нет
- Function of Law ReportДокумент3 страницыFunction of Law ReportzurainaОценок пока нет
- 16 Unit15Документ45 страниц16 Unit15ZULUОценок пока нет
- Power Electronics 05 60XXДокумент58 страницPower Electronics 05 60XXwhiteelephant93Оценок пока нет
- PLC Based Automatic Car Washing System-18849Документ6 страницPLC Based Automatic Car Washing System-18849Jok ZamОценок пока нет
- P, PI and PID Controllers - A Comparative StudyДокумент6 страницP, PI and PID Controllers - A Comparative StudySushil NamoijamОценок пока нет
- Smart Irrigation System Using IoT Report 2016 PDFДокумент45 страницSmart Irrigation System Using IoT Report 2016 PDFpavan puppalaОценок пока нет
- Lab Sheet: Faculty of Engineering & TechnologyДокумент12 страницLab Sheet: Faculty of Engineering & TechnologyMun Kit ChokОценок пока нет
- SRM Valliammai Engineering College (An Autonomous Institution)Документ12 страницSRM Valliammai Engineering College (An Autonomous Institution)vijayalakshmiОценок пока нет
- Dee3071 Electronic Computer Aided Design (Ecad) - SДокумент6 страницDee3071 Electronic Computer Aided Design (Ecad) - Skshika meganathanОценок пока нет
- Mechanical Engineering Department, GCET JAMMUДокумент31 страницаMechanical Engineering Department, GCET JAMMUquant followerОценок пока нет
- 4b Digital System - Logic Gates & Boolean ExpressionДокумент52 страницы4b Digital System - Logic Gates & Boolean ExpressionAhmad IzzuddinОценок пока нет
- (Experiment 3) BJT - Common Emiter Amplifier PDFДокумент9 страниц(Experiment 3) BJT - Common Emiter Amplifier PDFArik JuniarОценок пока нет
- EE6504 Electrical Machines-II PDFДокумент233 страницыEE6504 Electrical Machines-II PDFkumar m100% (1)
- Design of Fully Differential Operational Amplifier With High Gain, Large Bandwidth and Large Dynamic RangeДокумент93 страницыDesign of Fully Differential Operational Amplifier With High Gain, Large Bandwidth and Large Dynamic RangeAhmed EdrisОценок пока нет
- Mechanical Work Shop Lab ReportДокумент9 страницMechanical Work Shop Lab ReportOG HackОценок пока нет
- Solar Power PlantДокумент65 страницSolar Power PlantHil GloriosoОценок пока нет
- Senior Design Final Report PDFДокумент70 страницSenior Design Final Report PDFSachОценок пока нет
- MECH-151 TEXT BOOK TEVTA - 3 DesktopДокумент244 страницыMECH-151 TEXT BOOK TEVTA - 3 DesktopWasif Ali Sindhu100% (1)
- The Use of Non Linear Metal Oxide Resistors in Transformer PDFДокумент3 страницыThe Use of Non Linear Metal Oxide Resistors in Transformer PDFtalaporriОценок пока нет
- Chapter 6Документ38 страницChapter 6Deivasigamani SubramaniyanОценок пока нет
- Microcontroller Based Automatic Solar Power Tracking SystemДокумент6 страницMicrocontroller Based Automatic Solar Power Tracking SystemIAEME Publication50% (2)
- Differential Transformation Method for Mechanical Engineering ProblemsОт EverandDifferential Transformation Method for Mechanical Engineering ProblemsОценок пока нет
- 180Документ25 страниц180Fayyaz NadeemОценок пока нет
- Investment Account Opening Agreement: For Al Rajhi Capital Products and ServicesДокумент17 страницInvestment Account Opening Agreement: For Al Rajhi Capital Products and ServicesFayyaz NadeemОценок пока нет
- 1Документ16 страниц1Fayyaz Nadeem100% (1)
- Memorizing Quran Level 1 1Документ1 страницаMemorizing Quran Level 1 1Fayyaz NadeemОценок пока нет
- Department of Mechanical Engineering Technology: Design Methodology Results and AnalysisДокумент1 страницаDepartment of Mechanical Engineering Technology: Design Methodology Results and AnalysisFayyaz NadeemОценок пока нет
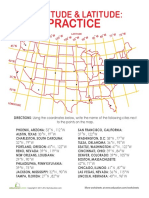
- Longitude & Latitude:: PracticeДокумент1 страницаLongitude & Latitude:: PracticeFayyaz NadeemОценок пока нет
- Module 5-Shaper (Handouts)Документ9 страницModule 5-Shaper (Handouts)Fayyaz NadeemОценок пока нет
- Module 6-Lathe Machine (Topics) PDFДокумент1 страницаModule 6-Lathe Machine (Topics) PDFFayyaz NadeemОценок пока нет
- Full Plaza Rate FINALДокумент1 страницаFull Plaza Rate FINALFayyaz NadeemОценок пока нет
- Module 3-Drill Presses (Topics) PDFДокумент1 страницаModule 3-Drill Presses (Topics) PDFFayyaz NadeemОценок пока нет
- Module 7-Grinding Machines (Topics) PDFДокумент1 страницаModule 7-Grinding Machines (Topics) PDFFayyaz NadeemОценок пока нет
- Pre Print Horizontal1Документ1 страницаPre Print Horizontal1Fayyaz NadeemОценок пока нет
- Down Down: Road RoadДокумент1 страницаDown Down: Road RoadFayyaz NadeemОценок пока нет
- Module 6-Lathe Machine (Topics)Документ1 страницаModule 6-Lathe Machine (Topics)Fayyaz NadeemОценок пока нет
- Module 3-Drill Presses (Topics)Документ1 страницаModule 3-Drill Presses (Topics)Fayyaz NadeemОценок пока нет
- Module 7-Grinding Machines (Topics)Документ1 страницаModule 7-Grinding Machines (Topics)Fayyaz NadeemОценок пока нет
- Timeline: By: Maryam Jabeen Grade: 6Документ1 страницаTimeline: By: Maryam Jabeen Grade: 6Fayyaz NadeemОценок пока нет
- Sawing Machines: Course Outline Topics Section Unit TopicДокумент1 страницаSawing Machines: Course Outline Topics Section Unit TopicFayyaz NadeemОценок пока нет
- Pre Print Curves1Документ1 страницаPre Print Curves1Fayyaz NadeemОценок пока нет
- Creating A Website With Publisher 2013 PDFДокумент33 страницыCreating A Website With Publisher 2013 PDFAyan RoyОценок пока нет
- Module 2-Milling Machines (Topics)Документ1 страницаModule 2-Milling Machines (Topics)Fayyaz NadeemОценок пока нет
- Pre Print Diagonal3Документ1 страницаPre Print Diagonal3Fayyaz NadeemОценок пока нет
- Pre Print Curves3Документ1 страницаPre Print Curves3Fayyaz NadeemОценок пока нет
- Pre Print Curves2Документ1 страницаPre Print Curves2Fayyaz NadeemОценок пока нет
- Wire Catalog ReadДокумент66 страницWire Catalog ReadIndra PurnamaОценок пока нет
- Alphabet Free WorksheetsДокумент28 страницAlphabet Free WorksheetsFayyaz NadeemОценок пока нет
- 2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFДокумент7 страниц2017 Simulation of Three-Phase Transformerless Online UPS Using MATLAB-SIMULINK-IJAERDV04I0569640 PDFTài Nguyễn Minh NhậtОценок пока нет
- Amen Electrical Technology-SwitchesДокумент6 страницAmen Electrical Technology-Switcheslegasu zemene100% (1)
- High-Pass and Low-Pass FiltersДокумент5 страницHigh-Pass and Low-Pass FiltersnayrochfrОценок пока нет
- Sample Chapter ch17 PDFДокумент37 страницSample Chapter ch17 PDFMaitraОценок пока нет
- Dino Kraspedon - My Contact With Flying SaucersДокумент46 страницDino Kraspedon - My Contact With Flying Saucersgolliwoghc0% (1)
- Electric FieldsДокумент23 страницыElectric FieldsRoanne Mae MañalacОценок пока нет
- Simple Harmonic Motion and Pendulums: SP211: Physics I Fall 2018 NameДокумент6 страницSimple Harmonic Motion and Pendulums: SP211: Physics I Fall 2018 NamekaypamaОценок пока нет
- Omron G3MC 202P DC5 DatasheetДокумент6 страницOmron G3MC 202P DC5 DatasheetArief MuhammadОценок пока нет
- 3 Basinc Ve Akiskan StatigiДокумент7 страниц3 Basinc Ve Akiskan Statigiizzet9696Оценок пока нет
- SCR Switching Characteristics OR Dynamic CharacteristicsДокумент22 страницыSCR Switching Characteristics OR Dynamic CharacteristicsVeeravasantharao BattulaОценок пока нет
- Physics Question PaperДокумент45 страницPhysics Question PaperErwin ElloОценок пока нет
- Problems Involving Mechanical Energy and FrictionДокумент3 страницыProblems Involving Mechanical Energy and FrictionwelcometotheswampОценок пока нет
- Comparison of Three Phase PV System in PSCAD and PowerFactoryДокумент8 страницComparison of Three Phase PV System in PSCAD and PowerFactorymlkz_01Оценок пока нет
- Man and Mystery Vol 16 - Phenomenon (Rev06)Документ157 страницMan and Mystery Vol 16 - Phenomenon (Rev06)Pablo Jr AgsaludОценок пока нет
- Presentation On CURRENT SOURCE INVERTERДокумент16 страницPresentation On CURRENT SOURCE INVERTERAakanksha DhidhiОценок пока нет
- BiratchowkДокумент2 страницыBiratchowkdarshanОценок пока нет
- Friction Lesson PlanДокумент6 страницFriction Lesson PlanmichelleОценок пока нет
- First Periodic Test in Science 8 I. Multiple Choice: Department of EducationДокумент3 страницыFirst Periodic Test in Science 8 I. Multiple Choice: Department of EducationRaymond Bugagao100% (1)
- Electromagnetics Antennas and Propagation - ProblemsДокумент85 страницElectromagnetics Antennas and Propagation - ProblemsAnum AhmedОценок пока нет
- Using A GMR Effect Sensor To Measure The Current in A Wire by Means of Its Magnetic FieldДокумент6 страницUsing A GMR Effect Sensor To Measure The Current in A Wire by Means of Its Magnetic FieldManeesha WijesingheОценок пока нет
- Bill Nye: Static ElectricityДокумент14 страницBill Nye: Static ElectricityVICTOR AXEL GARRICO HERNANDEZОценок пока нет
- EEE 3 Course SyllabusДокумент3 страницыEEE 3 Course SyllabusRonaldyn DabuОценок пока нет
- Loop Antenna: Antenna Engineering CHO, Yong HeuiДокумент12 страницLoop Antenna: Antenna Engineering CHO, Yong Heuisanem chandanaОценок пока нет
- NetSure701 Rectifier Shelf SpecificationsДокумент41 страницаNetSure701 Rectifier Shelf Specificationsronychaves100% (1)
- 3-Asynchronous ServomotorsДокумент30 страниц3-Asynchronous ServomotorschochoroyОценок пока нет