Вам также может понравиться
- Spring Design HandbookДокумент199 страницSpring Design Handbooklakshmanakumarr97% (31)
- Textile CalculationsДокумент15 страницTextile Calculationsamar9247100% (2)
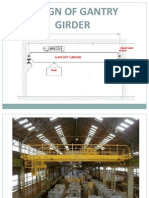
- Design of Gantry GirderДокумент28 страницDesign of Gantry Girders_bharathkumar75% (12)
- Turning Moment Diagram & FlywheelДокумент88 страницTurning Moment Diagram & FlywheelAvinash Jayashankar100% (5)
- Motorsport Engine & Vehicle Technology 2, Assignment 1Документ6 страницMotorsport Engine & Vehicle Technology 2, Assignment 1Al LockeОценок пока нет
- Panama Canal Regulations PDFДокумент114 страницPanama Canal Regulations PDFtony100% (1)
- Design of MonorailДокумент9 страницDesign of MonorailAnonymous Q8XIGqHyCОценок пока нет
- Fitting Fundamentals: For SewersДокумент21 страницаFitting Fundamentals: For SewersLM_S_S60% (5)
- Power Press Design, BrakesДокумент9 страницPower Press Design, Brakeszeynell70100% (2)
- Brake CalculationsДокумент2 страницыBrake CalculationsHardik GogiaОценок пока нет
- Screw Flight Development CalculationДокумент15 страницScrew Flight Development CalculationEmperor8983% (6)
- Farm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsОт EverandFarm Machinery - Tractors - A Collection of Articles on the Operation, Mechanics and Maintenance of TractorsОценок пока нет
- Upgradation and Relocation of Karakorum Highway For Basha Diamer Dam ProjectДокумент14 страницUpgradation and Relocation of Karakorum Highway For Basha Diamer Dam ProjectkuttakhaoОценок пока нет
- Design Verification CalculationsДокумент15 страницDesign Verification CalculationsKarthik KrОценок пока нет
- Cargo Securing Guidelines enДокумент208 страницCargo Securing Guidelines enAndrejs Meļņikovs100% (2)
- Conveyor Design-1Документ2 страницыConveyor Design-1PRASHANTHОценок пока нет
- Design and Analysis of Rocker ArmДокумент23 страницыDesign and Analysis of Rocker ArmAvt Shubhash25% (4)
- Exxonmobil Minimum Safety CriteriaДокумент40 страницExxonmobil Minimum Safety Criteriakhaled116071% (7)
- Phase 2.1Документ13 страницPhase 2.1Neil Allison Najorda CabilbilОценок пока нет
- Design of Through Type Plate GirderДокумент9 страницDesign of Through Type Plate GirderAnju Kl0% (1)
- Design Verification of Winch For Offshore Cranes PDFДокумент4 страницыDesign Verification of Winch For Offshore Cranes PDFtonyОценок пока нет
- Towing Winch Emergency Release Systems-Cu Aplicare Din 2020Документ4 страницыTowing Winch Emergency Release Systems-Cu Aplicare Din 2020tonyОценок пока нет
- Ni 617 July 2014 PDFДокумент46 страницNi 617 July 2014 PDFTi AnnelОценок пока нет
- Slab Bridge Eg Han - 2 - 150321122706Документ10 страницSlab Bridge Eg Han - 2 - 150321122706Ebisa AdamuОценок пока нет
- Mooring Do It Safely - 2013-08-09 PDFДокумент45 страницMooring Do It Safely - 2013-08-09 PDFjuricic2100% (1)
- Winch AnalysisДокумент21 страницаWinch Analysisvarshasdm19870% (1)
- SOM Chap - 3 (Torsion) Question BankДокумент22 страницыSOM Chap - 3 (Torsion) Question Banksmg26thmayОценок пока нет
- Deck Machineries: Windlass & Winches Onboard Offshore and AshoreДокумент30 страницDeck Machineries: Windlass & Winches Onboard Offshore and AshoreAlexEcnom100% (3)
- UE Guide Directive Machine 2006-42-CEДокумент406 страницUE Guide Directive Machine 2006-42-CEvoltaredОценок пока нет
- Abs-Equipment Condition Monitoring PDFДокумент101 страницаAbs-Equipment Condition Monitoring PDFShubhodeep SarkarОценок пока нет
- Same Virtus: Alarm ListДокумент23 страницыSame Virtus: Alarm ListLacatusu Mircea100% (1)
- Solution Manual For Introductory Statistics 9th Edition by Mann Chapters 1 13 PDFДокумент10 страницSolution Manual For Introductory Statistics 9th Edition by Mann Chapters 1 13 PDFa40095824643% (14)
- The Basics of The Calculations of Conveyor Belt Design ParametersДокумент5 страницThe Basics of The Calculations of Conveyor Belt Design ParametersHITESH GAHLOTОценок пока нет
- Lecture 26Документ22 страницыLecture 26phankhoa83100% (1)
- Fms200806 Timing Belts Calc Methods 202 enДокумент28 страницFms200806 Timing Belts Calc Methods 202 enbrviraniОценок пока нет
- Machine Elements: Ho Chi Minh City University of TechnologyДокумент47 страницMachine Elements: Ho Chi Minh City University of TechnologyMike RossОценок пока нет
- Steering Subsystem CalculationsДокумент12 страницSteering Subsystem CalculationsAbinandan PОценок пока нет
- Mathcad - GeneralДокумент17 страницMathcad - Generalapi-232034744Оценок пока нет
- Central Tool Room and Training Center Bhubaneswar: ROLL NO.-149Документ17 страницCentral Tool Room and Training Center Bhubaneswar: ROLL NO.-149Suryanshu Sundar ChopdarОценок пока нет
- Muthu Cad 2Документ8 страницMuthu Cad 2Sagarias AlbusОценок пока нет
- 202-Fms Timing Belts Calc Methods enДокумент28 страниц202-Fms Timing Belts Calc Methods enYesenia AquilinaОценок пока нет
- A Textbook of Machine Design: CV AV DV BVДокумент3 страницыA Textbook of Machine Design: CV AV DV BVWilly ChandraОценок пока нет
- 1.1 Specifications of Maruti Swift Engine: Click Here To See The Old (Before Incorporating Changes) KnolДокумент24 страницы1.1 Specifications of Maruti Swift Engine: Click Here To See The Old (Before Incorporating Changes) KnolPrashant ShahОценок пока нет
- Topic BeltsДокумент20 страницTopic BeltsAstri Ngent100% (1)
- 354-Add An Premium-KeraxДокумент99 страниц354-Add An Premium-KeraxIonОценок пока нет
- 354-ADDitionals AN PREMIUM-KERAXДокумент99 страниц354-ADDitionals AN PREMIUM-KERAXWi DuddaaОценок пока нет
- Machine Design CEPДокумент8 страницMachine Design CEPRizwan AkramОценок пока нет
- Controllable Pitch Propeller System Using The Shaft Line EnergyДокумент7 страницControllable Pitch Propeller System Using The Shaft Line EnergyPirosca VasileОценок пока нет
- Perhitungan Tension, Type Dan Size BeltДокумент12 страницPerhitungan Tension, Type Dan Size BeltHarry EP SitumorangОценок пока нет
- G.H. Raisoni College of EngineeringДокумент34 страницыG.H. Raisoni College of Engineeringnikhil_0401Оценок пока нет
- Note de Calcul Convoyeur MarocДокумент10 страницNote de Calcul Convoyeur MarocAkram FerchichiОценок пока нет
- Module 6 Assignment 1 1 2Документ4 страницыModule 6 Assignment 1 1 2sanjeev.rajoriaОценок пока нет
- History of Cranes: Ancient Greek Cranes Ancient Roman Cranes Medieval Cranes Origins Harbor CranesДокумент63 страницыHistory of Cranes: Ancient Greek Cranes Ancient Roman Cranes Medieval Cranes Origins Harbor CranesraulsaskОценок пока нет
- 2nd Chapter Notes Mechanical Engineering DiplomaДокумент7 страниц2nd Chapter Notes Mechanical Engineering DiplomaUsmanОценок пока нет
- Design of The Cross Flow Runner: ConstantsДокумент8 страницDesign of The Cross Flow Runner: ConstantshydraleyОценок пока нет
- Turning Moment Diagram & FlywheelДокумент88 страницTurning Moment Diagram & FlywheelAshishAgarwal100% (1)
- Calculation Salim 1Документ9 страницCalculation Salim 1Abdullahi AwwalОценок пока нет
- Ijirae:: Tower Crne Mast Anchorage Tie DesignДокумент8 страницIjirae:: Tower Crne Mast Anchorage Tie DesignIJIRAE- International Journal of Innovative Research in Advanced EngineeringОценок пока нет
- Vehicle TehcnologyДокумент7 страницVehicle TehcnologyKbey HasanОценок пока нет
- Garg, Aamod. 'Gantry Girders in India'Документ5 страницGarg, Aamod. 'Gantry Girders in India'Aamod GargОценок пока нет
- Guided By: DR P.V. Washimkar Presented By:-: Roshan Sao (Group Niraj Shah Saurabh Yadav Omkumar KushwahaДокумент19 страницGuided By: DR P.V. Washimkar Presented By:-: Roshan Sao (Group Niraj Shah Saurabh Yadav Omkumar KushwahaRoshanОценок пока нет
- Shaft DesignДокумент5 страницShaft Designtsega melkeОценок пока нет
- Lifting Hook DesignДокумент7 страницLifting Hook DesignAji V0% (1)
- Calculations For Springs and DampersДокумент3 страницыCalculations For Springs and DampersDheeraj SirimallaОценок пока нет
- Application of Rack and Pinion Mechanism For Power Generation Through Vehicular LoadДокумент19 страницApplication of Rack and Pinion Mechanism For Power Generation Through Vehicular LoadRoshanОценок пока нет
- Measuring The Performance Characteristics of A MotДокумент6 страницMeasuring The Performance Characteristics of A Motdani chОценок пока нет
- Supervised Learning Based Algorithm For Optimal Design of IM To Improve EfficiencyДокумент6 страницSupervised Learning Based Algorithm For Optimal Design of IM To Improve EfficiencyAli Arslan SafdarОценок пока нет
- Design of FlywheelДокумент15 страницDesign of FlywheelGujar SnehaОценок пока нет
- General and Practical Vibration Analysis On Toyota TundraДокумент13 страницGeneral and Practical Vibration Analysis On Toyota TundraAngelito MacaraigОценок пока нет
- Life Saving-Inland-2009-Rrr PDFДокумент12 страницLife Saving-Inland-2009-Rrr PDFtonyОценок пока нет
- SNДокумент113 страницSNtonyОценок пока нет
- TugДокумент2 страницыTugtonyОценок пока нет
- Section 8 Windlass Design and Testing: 8.1 GeneralДокумент3 страницыSection 8 Windlass Design and Testing: 8.1 GeneralANTON NEAGUОценок пока нет
- Section 8 Windlass Design and Testing: 8.1 GeneralДокумент3 страницыSection 8 Windlass Design and Testing: 8.1 GeneralANTON NEAGUОценок пока нет
- A2 Shipboard Fittings and Supporting Hull Structures Associated With Towing and Mooring On Conventional Vessels A2Документ6 страницA2 Shipboard Fittings and Supporting Hull Structures Associated With Towing and Mooring On Conventional Vessels A2tonyОценок пока нет
- Proiectare Cuplajelor PermanenteДокумент160 страницProiectare Cuplajelor PermanentetonyОценок пока нет
- Guide Application Directive 2006-42-Ec-2nd Edit 6-2010 enДокумент6 страницGuide Application Directive 2006-42-Ec-2nd Edit 6-2010 entonyОценок пока нет
- Importance of Surface Finish in The Design of Stainless SteelДокумент2 страницыImportance of Surface Finish in The Design of Stainless SteelPostolache ValentinОценок пока нет
- Cargo Securing Manual CsmtesДокумент31 страницаCargo Securing Manual Csmtesreka1950Оценок пока нет
- SPM Rules E-July14Документ98 страницSPM Rules E-July14Julio Fernando Asitimbay ChávezОценок пока нет
- SVR Part 6 Jan 19 PDFДокумент268 страницSVR Part 6 Jan 19 PDFsreeОценок пока нет
- 692D Guidelines Marine DesignersДокумент9 страниц692D Guidelines Marine Designerspapaki2Оценок пока нет
- Single Point Moorings 2018 KДокумент60 страницSingle Point Moorings 2018 KtonyОценок пока нет
- 692D Guidelines Marine DesignersДокумент9 страниц692D Guidelines Marine Designerspapaki2Оценок пока нет
- Electropalan-Verificarea Motorului ElectricДокумент28 страницElectropalan-Verificarea Motorului ElectrictonyОценок пока нет
- Fundamentals of Pulley and WinchesДокумент62 страницыFundamentals of Pulley and WinchesvikasgahlyanОценок пока нет
- Mooring and Unmooring: PPE To Be UsedДокумент7 страницMooring and Unmooring: PPE To Be UsedtonyОценок пока нет
- CSS Lab ManualДокумент32 страницыCSS Lab ManualQaif AmzОценок пока нет
- Oculus SDK OverviewДокумент47 страницOculus SDK OverviewparaqueimaОценок пока нет
- SV Concepts PLK PDFДокумент276 страницSV Concepts PLK PDFPoojashree LRОценок пока нет
- Gen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Документ13 страницGen-Math11 - Q1 - Mod10 - Solving-Real-Life-Problems-Involving-Rational (EJBOY)Angeline TumananОценок пока нет
- 1.summative-Test Math7Документ1 страница1.summative-Test Math7Jaylor GaridoОценок пока нет
- Anue 3500 Qrs - 0Документ2 страницыAnue 3500 Qrs - 0ullascsОценок пока нет
- S Energy SN 72 Cell Series Solar Panel Datasheet V 01Документ2 страницыS Energy SN 72 Cell Series Solar Panel Datasheet V 01infercomОценок пока нет
- Water Levels Forecast in Thailand: A Case Study of Chao Phraya RiverДокумент6 страницWater Levels Forecast in Thailand: A Case Study of Chao Phraya RiverErna UtamiОценок пока нет
- Geomorphic Evidences of Recent Tectonic Activity in The Forearc, Southern PeruДокумент11 страницGeomorphic Evidences of Recent Tectonic Activity in The Forearc, Southern PeruVayolait BardОценок пока нет
- TE-419891-001 - 862-U-2301 - BIOCIDE DOSING PACKAGE - Rev.BДокумент12 страницTE-419891-001 - 862-U-2301 - BIOCIDE DOSING PACKAGE - Rev.Brizwan.zamanОценок пока нет
- Science BДокумент2 страницыScience BIyer JuniorОценок пока нет
- OK Flux 231 (F7AZ-EL12) PDFДокумент2 страницыOK Flux 231 (F7AZ-EL12) PDFborovniskiОценок пока нет
- Question IARДокумент4 страницыQuestion IARAryan jay vermaОценок пока нет
- K20 Engine Control Module X3 (Lt4) Document ID# 4739106Документ3 страницыK20 Engine Control Module X3 (Lt4) Document ID# 4739106Data TécnicaОценок пока нет
- Edan M3B Vital Signs Monitor User ManualДокумент92 страницыEdan M3B Vital Signs Monitor User ManualJosé marino Franco AlzateОценок пока нет
- Lab 3.1 - Configuring and Verifying Standard ACLsДокумент9 страницLab 3.1 - Configuring and Verifying Standard ACLsRas Abel BekeleОценок пока нет
- Irfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120AДокумент12 страницIrfb3306Pbf Irfs3306Pbf Irfsl3306Pbf: V 60V R Typ. 3.3M: Max. 4.2M I 160A C I 120ADirson Volmir WilligОценок пока нет
- EC 201 Network TheoryДокумент2 страницыEC 201 Network TheoryJoseph JohnОценок пока нет
- Wavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Документ64 страницыWavetek Portable RF Power Meter Model 1034A (1499-14166) Operating and Maintenance Manual, 1966.Bob Laughlin, KWØRLОценок пока нет
- Projector Spec 8040Документ1 страницаProjector Spec 8040Radient MushfikОценок пока нет
- Biomechanic of Foot PDFДокумент8 страницBiomechanic of Foot PDFMichealowen BabygoalОценок пока нет
- Aluminum: DR 900 Analytical ProcedureДокумент4 страницыAluminum: DR 900 Analytical Procedurewulalan wulanОценок пока нет
- PPF CalculatorДокумент2 страницыPPF CalculatorshashanamouliОценок пока нет
- List of GHS Hazard Statement & PictogramsДокумент33 страницыList of GHS Hazard Statement & PictogramsKhairul BarsriОценок пока нет
- Angular AccuracyДокумент4 страницыAngular AccuracySwatilekha ChowdhuryОценок пока нет
- An4879 Introduction To Usb Hardware and PCB Guidelines Using Stm32 Mcus StmicroelectronicsДокумент26 страницAn4879 Introduction To Usb Hardware and PCB Guidelines Using Stm32 Mcus StmicroelectronicsBulentОценок пока нет
- Factors That Affect College Students' Attitudes Toward MathematicsДокумент17 страницFactors That Affect College Students' Attitudes Toward MathematicsAnthony BernardinoОценок пока нет