Вам также может понравиться
- Practica 3 Rectificador Tipo Puente Trifasico Onda CompletaДокумент20 страницPractica 3 Rectificador Tipo Puente Trifasico Onda CompletaWalther EstevezОценок пока нет
- Taller Localización de Mi Plan de NegocioДокумент2 страницыTaller Localización de Mi Plan de NegocioWalther EstevezОценок пока нет
- Normas de Proteccion (Nema-Ip)Документ23 страницыNormas de Proteccion (Nema-Ip)Walther Estevez100% (1)
- OPTOACOPLADORESДокумент2 страницыOPTOACOPLADORESWalther EstevezОценок пока нет
- TERMOCUPLASДокумент18 страницTERMOCUPLASWalther EstevezОценок пока нет
- Diagrama de Flujo para El Sistema de LlenadoДокумент1 страницаDiagrama de Flujo para El Sistema de LlenadoWalther EstevezОценок пока нет
- Sensor de ImagenДокумент2 страницыSensor de ImagenWalther EstevezОценок пока нет
- Proyecto de AulaДокумент4 страницыProyecto de AulaWalther EstevezОценок пока нет
- Encoder SДокумент2 страницыEncoder SWalther EstevezОценок пока нет
- Desarrollo de La ActividadДокумент2 страницыDesarrollo de La ActividadWalther Estevez100% (1)
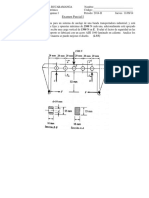
- Primer Parcial Diseño Mecánico I 2014 IIДокумент4 страницыPrimer Parcial Diseño Mecánico I 2014 IIWalther EstevezОценок пока нет
- Funciones TrascendentalesДокумент6 страницFunciones TrascendentalesWalther EstevezОценок пока нет
- Rotura de Cigüeñal Motor WaukeshaДокумент6 страницRotura de Cigüeñal Motor WaukeshaWalther EstevezОценок пока нет
- Practica No. 1 Robotica (Robot Irb120)Документ9 страницPractica No. 1 Robotica (Robot Irb120)Walther EstevezОценок пока нет
- Act 4. Cazares Cruz Gustavo.Документ16 страницAct 4. Cazares Cruz Gustavo.Gus Tavo KazaresОценок пока нет
- H.S O2 MedicinalДокумент4 страницыH.S O2 MedicinalCrismar PuertaОценок пока нет
- Flu orДокумент44 страницыFlu orwomaninchainsОценок пока нет
- Tesis Maltodextrina TunasДокумент69 страницTesis Maltodextrina TunasNicolas Candia100% (1)
- Quimica - Unidad Integracion - 2023 - CriminalisticaДокумент6 страницQuimica - Unidad Integracion - 2023 - CriminalisticaAnalia ErbesОценок пока нет
- Grupo 5Документ8 страницGrupo 5Jasmine CGОценок пока нет
- Equilibrio Sólido-LíquidoДокумент17 страницEquilibrio Sólido-LíquidoJuan Cristobal HdzОценок пока нет
- Informe de SedimentaciónДокумент48 страницInforme de SedimentaciónBruno ValverdeОценок пока нет
- Puente Ramirez 1874496 PIA Potencia FluidaДокумент8 страницPuente Ramirez 1874496 PIA Potencia FluidaAlex RamirezОценок пока нет
- INSTALACION DE GASesДокумент12 страницINSTALACION DE GASesespartano100% (1)
- Propiedades Fisicas Del LubricanteДокумент11 страницPropiedades Fisicas Del LubricanteMiguel Steve CenaОценок пока нет
- Propiedades de La MateriaДокумент12 страницPropiedades de La MateriaValeria Pérez100% (1)
- Medicion de Caudales Por Metodos GraficosДокумент21 страницаMedicion de Caudales Por Metodos GraficosJhon JesúsОценок пока нет
- ConclusionesДокумент2 страницыConclusionesYuli Eveling Cabello Chacon100% (2)
- E Motta UIS - Importancia de La Medición de Densidad en SMD HC LíquidosДокумент55 страницE Motta UIS - Importancia de La Medición de Densidad en SMD HC LíquidosAlberto DiazОценок пока нет
- Contenidos A Trabajar Durante El Ciclo Lectivo 2022Документ4 страницыContenidos A Trabajar Durante El Ciclo Lectivo 2022Diame SánchezОценок пока нет
- Aplicaciones de Las Ecuaciones Diferenciales Ordinarias deДокумент15 страницAplicaciones de Las Ecuaciones Diferenciales Ordinarias deDavid A GualpaОценок пока нет
- Memoria DescriptivaДокумент8 страницMemoria DescriptivaedsirgalОценок пока нет
- T SuperficialДокумент4 страницыT SuperficialCamilo JcОценок пока нет
- Fines Quimica - Materias Pendientes - Trabajo Práctico #1 - La Materia-1Документ5 страницFines Quimica - Materias Pendientes - Trabajo Práctico #1 - La Materia-1Juano el matadorОценок пока нет
- Punto de FluizezДокумент27 страницPunto de FluizezMelissa MartinezОценок пока нет
- 2 Destilacion SimpleДокумент5 страниц2 Destilacion SimpleDaniel Will Morales Guerrero100% (1)
- EnsayoДокумент3 страницыEnsayoOscar VazquezОценок пока нет
- Ensayo de Viscosidad Cinemática en El PavimentoДокумент3 страницыEnsayo de Viscosidad Cinemática en El PavimentoAdrian Alexander Vivas Gonzalez100% (1)
- Agitacion TeoriaДокумент2 страницыAgitacion TeoriaAlejandra SalasОценок пока нет
- Trabajo de Propiedades Coligativas.Документ11 страницTrabajo de Propiedades Coligativas.DanielОценок пока нет
- Lab Cambio de Fase.Документ6 страницLab Cambio de Fase.Ricardo Castillo De LeónОценок пока нет
- 03 Fuerzas Sobre Superficies Sumergidas 26 - AgostoДокумент13 страниц03 Fuerzas Sobre Superficies Sumergidas 26 - AgostoDaniel HomsОценок пока нет
- (Spanish (Auto-Generated) ) Maravilla Modernas Ingeniería Hidráulica 1 de 6 (DownSub - Com)Документ9 страниц(Spanish (Auto-Generated) ) Maravilla Modernas Ingeniería Hidráulica 1 de 6 (DownSub - Com)Joseph Luis PossoОценок пока нет
- Informe de Modelado. FINДокумент27 страницInforme de Modelado. FINJaner Urango AnayaОценок пока нет