Вам также может понравиться
- Dynamic Modelling and Control of Counter-Flow Heat Exchanger For Heating and Cooling SystemsДокумент6 страницDynamic Modelling and Control of Counter-Flow Heat Exchanger For Heating and Cooling SystemsstevenОценок пока нет
- Two Phase Flow and Heat TransferДокумент15 страницTwo Phase Flow and Heat TransferRaghu Rambug100% (1)
- Crossflow Paper Final Draft M WalliДокумент64 страницыCrossflow Paper Final Draft M Walliapi-392769552Оценок пока нет
- Study On Heat Transfer Calculation Method of Ground Heat Exchangers Based On Heat Pump Unit Operation CharacteristicsДокумент9 страницStudy On Heat Transfer Calculation Method of Ground Heat Exchangers Based On Heat Pump Unit Operation CharacteristicsARPITA SINGHОценок пока нет
- A Didactic Test Rig To Analyze The Shell and Tube Heat Exchange and Stability of Control SystemДокумент10 страницA Didactic Test Rig To Analyze The Shell and Tube Heat Exchange and Stability of Control Systemnicacio_89507470Оценок пока нет
- Run Around Coil PDFДокумент8 страницRun Around Coil PDFSufian SarwarОценок пока нет
- Eteiac1411 (Heat Exchanger)Документ6 страницEteiac1411 (Heat Exchanger)Evans IraborОценок пока нет
- Model-Based Analysis and Simulation of Regenerative Heat WheelДокумент13 страницModel-Based Analysis and Simulation of Regenerative Heat Wheeladarsh_mrОценок пока нет
- Observer-Based Monitoring of Heat ExchangersДокумент10 страницObserver-Based Monitoring of Heat ExchangersMiguel LópezОценок пока нет
- Observer-Based Monitoring of Heat Exchangers:, ,, Rafael-Maxim M Endez-Oca Na, Gerardo-Vicente Guerrero-Ram IrezДокумент10 страницObserver-Based Monitoring of Heat Exchangers:, ,, Rafael-Maxim M Endez-Oca Na, Gerardo-Vicente Guerrero-Ram Irezapi-19660864Оценок пока нет
- Analysis of The Dynamic Characteristics of A Single-Pressure Combined-Cycle Power PlantДокумент10 страницAnalysis of The Dynamic Characteristics of A Single-Pressure Combined-Cycle Power PlantIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalОценок пока нет
- Heat Recovery Steam GeneratorДокумент21 страницаHeat Recovery Steam GeneratorAbdullah AhmedОценок пока нет
- Thermal Analysis of Multi-Row Cross-Flow Heat ExchangersДокумент6 страницThermal Analysis of Multi-Row Cross-Flow Heat ExchangersnaveenОценок пока нет
- Dynamic Simulation of Double Pipe Heat Exchanger Using MATLAB SimulinkДокумент8 страницDynamic Simulation of Double Pipe Heat Exchanger Using MATLAB SimulinkacepwcxОценок пока нет
- An Engineering Model of Coils and Heat Exchangers For HVAC System Simulation and OptimizationДокумент6 страницAn Engineering Model of Coils and Heat Exchangers For HVAC System Simulation and Optimizationsilentsoldier781344Оценок пока нет
- International Journal of Heat and Mass Transfer: Jun Yu, Lin Su, Kang Li, Mingkang Liu, Hua ZhangДокумент13 страницInternational Journal of Heat and Mass Transfer: Jun Yu, Lin Su, Kang Li, Mingkang Liu, Hua ZhangJhon AguirreОценок пока нет
- Heat Transfer Final PaperДокумент14 страницHeat Transfer Final PaperGilbert RacinesОценок пока нет
- 1 s2.0 S0017931005003005 MainДокумент9 страниц1 s2.0 S0017931005003005 MainMuhammad AwaisОценок пока нет
- Chilled Water Plant Optimization Based On Part-Load Cooling Tower PerformanceДокумент22 страницыChilled Water Plant Optimization Based On Part-Load Cooling Tower PerformanceCarlos TorresОценок пока нет
- Optimization of Water-Cooled Chiller System With Load-Based Speed ControlДокумент20 страницOptimization of Water-Cooled Chiller System With Load-Based Speed ControlShalehAhmadОценок пока нет
- Zvonimir Jankovi C, Jaime Sieres, Fernando Cerdeira, Branimir Pavkovi CДокумент10 страницZvonimir Jankovi C, Jaime Sieres, Fernando Cerdeira, Branimir Pavkovi CFrancisco OppsОценок пока нет
- HVAC System Optimization For Energy Management by Evolutionary ProgrammingДокумент12 страницHVAC System Optimization For Energy Management by Evolutionary ProgrammingEsmining MitarumОценок пока нет
- Kim2007 OilmineralДокумент8 страницKim2007 OilmineralFatima Ezzahra LaftouhiОценок пока нет
- Heat Exchanger PDFДокумент9 страницHeat Exchanger PDFsunita45Оценок пока нет
- PhysResInt 10 341016Документ10 страницPhysResInt 10 341016kannanmech87Оценок пока нет
- Entropy 15 00474 PDFДокумент16 страницEntropy 15 00474 PDFBrando HernandezОценок пока нет
- Entropy: A New Simple Method For Estimating Exergy Destruction in Heat ExchangersДокумент16 страницEntropy: A New Simple Method For Estimating Exergy Destruction in Heat ExchangersBrando HernandezОценок пока нет
- Entropy 15 00474 PDFДокумент16 страницEntropy 15 00474 PDFShaikh BilalОценок пока нет
- (Doi 10.1002/3527601996.ch13) Wittig, Sigmar Vöhringer, Otmar Kim, Soksik - High Intensity Combustors - Steady Isobaric Combustion (DFG SF High-Int. Combust. O-BK) - Numerical Modelling of CombuДокумент17 страниц(Doi 10.1002/3527601996.ch13) Wittig, Sigmar Vöhringer, Otmar Kim, Soksik - High Intensity Combustors - Steady Isobaric Combustion (DFG SF High-Int. Combust. O-BK) - Numerical Modelling of CombuawarialocksОценок пока нет
- Dynamicsimulation of A Building Central Chilling System and Evaluation of EMCS On-Line Control StrategiesДокумент20 страницDynamicsimulation of A Building Central Chilling System and Evaluation of EMCS On-Line Control StrategiesEva ViskadourakiОценок пока нет
- Heat Exchanger Group 17Документ22 страницыHeat Exchanger Group 17ja ma0% (1)
- Analysis of Heat Transfer, Friction Factor and Exergy Loss in Plate Heat Exchanger Using FluentДокумент8 страницAnalysis of Heat Transfer, Friction Factor and Exergy Loss in Plate Heat Exchanger Using FluentFadi YasinОценок пока нет
- Performance Analysis of Shell and Tube Heat ExchangersДокумент5 страницPerformance Analysis of Shell and Tube Heat ExchangersMichał KisielewskiОценок пока нет
- Double-Pipe Heat Exchanger DesignДокумент23 страницыDouble-Pipe Heat Exchanger DesignDaniel James Watkins100% (3)
- Setting of A Heat Pipe in ANSYS FluentДокумент41 страницаSetting of A Heat Pipe in ANSYS FluentHaider AliОценок пока нет
- Analysis of Counter Flow Heat ExchangerДокумент5 страницAnalysis of Counter Flow Heat ExchangerSantiKhamtreeОценок пока нет
- Heat Exchanger HandoutДокумент11 страницHeat Exchanger Handoutchegg userОценок пока нет
- Experimental Investigation of A Thermosyphon Based Heat Exchanger Used in Energy Efficient Air Handling UnitsДокумент8 страницExperimental Investigation of A Thermosyphon Based Heat Exchanger Used in Energy Efficient Air Handling Unitsmjs9170Оценок пока нет
- A Simplified Model For The Prediction of The Thermal Performance For Cross Flow Air Cooled Heat Exchangers With A New Air Side Thermal CorrelationДокумент32 страницыA Simplified Model For The Prediction of The Thermal Performance For Cross Flow Air Cooled Heat Exchangers With A New Air Side Thermal CorrelationGuillaumeОценок пока нет
- Thermo ElectricДокумент11 страницThermo ElectricpuchongkОценок пока нет
- Accepted Manuscript: Applied Thermal EngineeringДокумент24 страницыAccepted Manuscript: Applied Thermal EngineeringAnkit LonareОценок пока нет
- Performance Analyses of Counter-Flow Closed Wet Cooling Towers Based On A Simplified Calculation MethodДокумент15 страницPerformance Analyses of Counter-Flow Closed Wet Cooling Towers Based On A Simplified Calculation MethodAmir AbbaszadehОценок пока нет
- Mayi Et Al.Документ16 страницMayi Et Al.Lekane nelsonОценок пока нет
- Numerical Modeling of Heat Transfer in The Fixed-MДокумент7 страницNumerical Modeling of Heat Transfer in The Fixed-MManuela ArenasОценок пока нет
- Transient Simulation of Vapor LiqДокумент5 страницTransient Simulation of Vapor LiqsantoshkumarvenuОценок пока нет
- Energy Audit of Industrial Processes - Chap 1-2Документ52 страницыEnergy Audit of Industrial Processes - Chap 1-2simomedmed2000Оценок пока нет
- Heat Exchanger Fundamentals: Heat Exchange Concepts & Heat ExchangersДокумент3 страницыHeat Exchanger Fundamentals: Heat Exchange Concepts & Heat ExchangersGustavОценок пока нет
- Experiment #10 Part A Parallel and Counter Flow Heat ExchangersДокумент7 страницExperiment #10 Part A Parallel and Counter Flow Heat Exchangersibrahim sundayОценок пока нет
- Heat Exchangers ExplainedДокумент11 страницHeat Exchangers ExplainedGhassan ZummitОценок пока нет
- Cooling Water-Outlet TemperatureДокумент5 страницCooling Water-Outlet TemperatureChem.EnggОценок пока нет
- Entropy 19 00394 With CoverДокумент9 страницEntropy 19 00394 With Coverarun rajaramОценок пока нет
- Chapter 3 - Heat IntegrationДокумент25 страницChapter 3 - Heat IntegrationAmeerRashidОценок пока нет
- Emre 2012 MSTH Sum GL CmugerinДокумент15 страницEmre 2012 MSTH Sum GL CmugerincesmugОценок пока нет
- CHE245 Lab Report SOLTEQ Concentric TubeДокумент46 страницCHE245 Lab Report SOLTEQ Concentric TubeVuyiseka maqukwanaОценок пока нет
- Che245 Lab Report Solteq Concentric Tube Heat Exchanger UnitДокумент10 страницChe245 Lab Report Solteq Concentric Tube Heat Exchanger UnitSyafiq Sabran HasnanОценок пока нет
- Combined Cooling, Heating, and Power Systems: Modeling, Optimization, and OperationОт EverandCombined Cooling, Heating, and Power Systems: Modeling, Optimization, and OperationОценок пока нет
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersОт EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersРейтинг: 4 из 5 звезд4/5 (13)
- Classwork Comparison ChartДокумент3 страницыClasswork Comparison ChartDaisyОценок пока нет
- Review On Exergetic Analysis Renewable ResourcesДокумент1 страницаReview On Exergetic Analysis Renewable ResourcesDaisyОценок пока нет
- A Key Review On Exergetic Analysis and Assessment of Renewable Energy Resources For A Sustainable FutureДокумент69 страницA Key Review On Exergetic Analysis and Assessment of Renewable Energy Resources For A Sustainable Futuremonsterh5Оценок пока нет
- Frequency Adverbs Fun Activities Games 612Документ2 страницыFrequency Adverbs Fun Activities Games 612Daisy100% (1)
- AnecdotaДокумент1 страницаAnecdotaDaisyОценок пока нет
- The Influence of Wind On The Performance of Forced Draught Air-Cooled Heat ExchangersДокумент19 страницThe Influence of Wind On The Performance of Forced Draught Air-Cooled Heat ExchangersArdian P NoviatmokoОценок пока нет
- Heat TransferДокумент131 страницаHeat Transferjohn babe jeszareth Capili100% (2)
- Final Exam MA and MBДокумент6 страницFinal Exam MA and MBعبدالله حامد الرفاعيОценок пока нет
- A Review of Heat Transfer Enhancement Using Twisted Tape With and Without PerforationДокумент9 страницA Review of Heat Transfer Enhancement Using Twisted Tape With and Without PerforationIJIERT-International Journal of Innovations in Engineering Research and TechnologyОценок пока нет
- Depressuring A Practical GuideДокумент30 страницDepressuring A Practical GuidePhuoc VoОценок пока нет
- Fluid Bed Drying FundamentalsДокумент83 страницыFluid Bed Drying FundamentalsPassmore Dube100% (1)
- Me Syllabus PDFДокумент26 страницMe Syllabus PDFAaryansh PandeyОценок пока нет
- 1999 - Blasco - Flash Drying of Fish Meals With Superheated Stem Isothermal ProcessДокумент17 страниц1999 - Blasco - Flash Drying of Fish Meals With Superheated Stem Isothermal ProcessGuilherme Venturi RonchiОценок пока нет
- Bell, K. J.Документ6 страницBell, K. J.Biju KuzhiveliОценок пока нет
- Analysis of Heat Transfer Phenomena From Different Fin Geometries Using CFD Simulation in ANSYS®Документ8 страницAnalysis of Heat Transfer Phenomena From Different Fin Geometries Using CFD Simulation in ANSYS®AMBUJ GUPTA 17BCM0060Оценок пока нет
- Appendix 8 (Edited Again)Документ12 страницAppendix 8 (Edited Again)Muhammad AdrianОценок пока нет
- Forced ConvectionДокумент5 страницForced ConvectionRahul NairОценок пока нет
- Limitations On Gas Turbine Performance Imposed by Large Turbine Cooling FlowsДокумент8 страницLimitations On Gas Turbine Performance Imposed by Large Turbine Cooling FlowsSickPinguОценок пока нет
- Practise Questions 2019Документ8 страницPractise Questions 2019Sehar IshtiaqОценок пока нет
- Devolatilization Characteristics of Large Particles of Tyre Rubber Under Combustion Conditions PDFДокумент11 страницDevolatilization Characteristics of Large Particles of Tyre Rubber Under Combustion Conditions PDFclaralisieОценок пока нет
- Heat Exchangers Types & Applications, LMTD Derivation & ProblemsДокумент16 страницHeat Exchangers Types & Applications, LMTD Derivation & Problemsananth2012Оценок пока нет
- Chapter 12 - Heat ExchangersДокумент53 страницыChapter 12 - Heat ExchangershaqjmiОценок пока нет
- 1 s2.0 S0038092X1930355X Main PDFДокумент9 страниц1 s2.0 S0038092X1930355X Main PDFkrunalgangawane85Оценок пока нет
- Home Assignment - 3: Chapter-3Документ3 страницыHome Assignment - 3: Chapter-3AkhilОценок пока нет
- 9A23501 Heat Transfer in BioprocessesДокумент4 страницы9A23501 Heat Transfer in BioprocessessivabharathamurthyОценок пока нет
- HMT - Docx SSVДокумент2 страницыHMT - Docx SSVcyberlogxОценок пока нет
- Case Studies in Thermal Engineering: Rubens E.N. Castro, Rita M.B. Alves, Claudio A.O. NascimentoДокумент14 страницCase Studies in Thermal Engineering: Rubens E.N. Castro, Rita M.B. Alves, Claudio A.O. NascimentoIstiqamah HarnamaОценок пока нет
- Basics Interview Questions With AnswersДокумент42 страницыBasics Interview Questions With AnswersBasovi Wahyu AdytamaОценок пока нет
- Heat Transfer Analysis of Electrical Wire, Furnace Wall and Composite Oven WindowДокумент11 страницHeat Transfer Analysis of Electrical Wire, Furnace Wall and Composite Oven WindowVijaykumar NagathanОценок пока нет
- HTC Explained Star CCMДокумент25 страницHTC Explained Star CCMramsinntОценок пока нет
- Energy Audit: Unit - 2Документ61 страницаEnergy Audit: Unit - 2Nikhil TiruvaipatiОценок пока нет
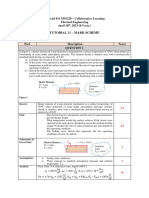
- Tutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)Документ6 страницTutorial 11 - MS3220 Rekayasa Termal (Mark Scheme)i need documentsОценок пока нет
- Heat Transfer in Olga 2000Документ11 страницHeat Transfer in Olga 2000Akin MuhammadОценок пока нет
- 05 - Effect of Wall Orientation On The Optimum Insulation Thickness by Using A Dynamic Method PDFДокумент7 страниц05 - Effect of Wall Orientation On The Optimum Insulation Thickness by Using A Dynamic Method PDFOMAR ArgoupОценок пока нет
- (B0566) P. Hodgeson - Quenching and Carburising-Maney Materials Science (1993) PDFДокумент319 страниц(B0566) P. Hodgeson - Quenching and Carburising-Maney Materials Science (1993) PDFZerina ČustovićОценок пока нет