Вам также может понравиться
- ElectricidadДокумент1 страницаElectricidadbartolome777ooОценок пока нет
- Inductancia Presentacion.1Документ10 страницInductancia Presentacion.1bartolome777ooОценок пока нет
- Wimax Semana 9Документ29 страницWimax Semana 9bartolome777ooОценок пока нет
- Electro Mecanic AДокумент3 страницыElectro Mecanic Abartolome777ooОценок пока нет
- Área de ElectricidadДокумент3 страницыÁrea de Electricidadbartolome777ooОценок пока нет
- Práctica 05 Modulador FMДокумент12 страницPráctica 05 Modulador FMbartolome777ooОценок пока нет
- Práctica 02 Osciladores RFДокумент7 страницPráctica 02 Osciladores RFbartolome777ooОценок пока нет
- Tarea1 ANT v2Документ1 страницаTarea1 ANT v2bartolome777ooОценок пока нет
- Preparatorio ManchesterДокумент11 страницPreparatorio ManchesterAdriana BalsecaОценок пока нет
- Programa Analítico de PDSДокумент3 страницыPrograma Analítico de PDSbartolome777ooОценок пока нет
- Práctica 04 Demodulador AMДокумент8 страницPráctica 04 Demodulador AMbartolome777ooОценок пока нет
- Práctica 03 Modulador AMДокумент10 страницPráctica 03 Modulador AMbartolome777ooОценок пока нет
- Práctica 03 Modulador AMДокумент10 страницPráctica 03 Modulador AMbartolome777ooОценок пока нет
- Práctica 04 Demodulador AMДокумент8 страницPráctica 04 Demodulador AMbartolome777ooОценок пока нет
- Campo Eléctrico: Disco de CargaДокумент10 страницCampo Eléctrico: Disco de Cargabartolome777ooОценок пока нет
- Práctica 05 Modulador FMДокумент12 страницPráctica 05 Modulador FMbartolome777ooОценок пока нет
- Práctica 02 Osciladores RFДокумент7 страницPráctica 02 Osciladores RFbartolome777ooОценок пока нет
- Introducción al laboratorio de comunicacionesДокумент8 страницIntroducción al laboratorio de comunicacionesbartolome777ooОценок пока нет
- Practica 2Документ2 страницыPractica 2bartolome777ooОценок пока нет
- Ley de AmpereДокумент2 страницыLey de Amperebartolome777ooОценок пока нет
- Práctica 02 Osciladores RFДокумент7 страницPráctica 02 Osciladores RFbartolome777ooОценок пока нет
- Práctica 02 Laboratorio de Electrónica IДокумент8 страницPráctica 02 Laboratorio de Electrónica Ibartolome777ooОценок пока нет
- Malla curricular de Ingeniería de Producción de la Escuela Politécnica NacionalДокумент1 страницаMalla curricular de Ingeniería de Producción de la Escuela Politécnica Nacionalbartolome777ooОценок пока нет
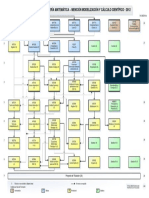
- Malla Curricular Ing Matematica Mencion Modelizacion PDFДокумент1 страницаMalla Curricular Ing Matematica Mencion Modelizacion PDFbartolome777ooОценок пока нет
- Malla Curricular Carrera FísicaДокумент1 страницаMalla Curricular Carrera FísicaEfrén SandovalОценок пока нет
- 1051 380 Malla Curricular-Telecomunicaciones-semipresencialДокумент1 страница1051 380 Malla Curricular-Telecomunicaciones-semipresencialbartolome777ooОценок пока нет
- FlashДокумент1 страницаFlashbartolome777ooОценок пока нет
- Mapa Conceptual Gráficos de ControlДокумент1 страницаMapa Conceptual Gráficos de ControlAlejandra Salazar100% (1)
- Control Presupuestario (FM/BCS)Документ338 страницControl Presupuestario (FM/BCS)Rafael Campo100% (2)
- Vocabulario TecnicoДокумент6 страницVocabulario TecnicosmallfireОценок пока нет
- Modulo Introduccion Al Sonido en Vivo PDFДокумент120 страницModulo Introduccion Al Sonido en Vivo PDFFabian Andres GonzalezОценок пока нет
- Tutorial Cadworx 2015Документ19 страницTutorial Cadworx 2015Marco Rg100% (3)
- Aplicaciones Informáticas4Документ79 страницAplicaciones Informáticas4Carmen Sanz ArillaОценок пока нет
- Examen Ccna 1 y 2Документ10 страницExamen Ccna 1 y 2Jose FrancoОценок пока нет
- Blockchain Smartcontracts y Arbitraje ODRДокумент45 страницBlockchain Smartcontracts y Arbitraje ODRDiego e Rodríguez MurciaОценок пока нет
- Trabajo Práctico TelemetríaДокумент7 страницTrabajo Práctico TelemetríaRodrii NicolasОценок пока нет
- Gfpi-F-019 - Guia - de - Aprendizaje 01Документ7 страницGfpi-F-019 - Guia - de - Aprendizaje 01Julieth MoraОценок пока нет
- P.O.N en Caso de Movimiento TeluricoДокумент2 страницыP.O.N en Caso de Movimiento TeluricoSandra Patricia Castro CarvajalОценок пока нет
- KEMO Planeacion Didactica U1 2019 2 B1Документ7 страницKEMO Planeacion Didactica U1 2019 2 B1qwewd 123sdОценок пока нет
- Relación de Buenos ContribuyentesДокумент3 страницыRelación de Buenos ContribuyenteskatherinОценок пока нет
- Oposiciones TemarioДокумент4 страницыOposiciones TemarioGema GRОценок пока нет
- EjerciciosTema1 2 ResueltosДокумент4 страницыEjerciciosTema1 2 ResueltosMayte MerchanОценок пока нет
- AP7 OA DispMovДокумент52 страницыAP7 OA DispMovhugo correaОценок пока нет
- Guia de 6 Informatica PDFДокумент6 страницGuia de 6 Informatica PDFSilvana PinillaОценок пока нет
- Actividad 1 POO2Документ6 страницActividad 1 POO2jhon carvajalОценок пока нет
- Código: GT-P01-F01 Versión: 03 Fecha: 28/04/2011: Ministerio de Minas y EnergíaДокумент3 страницыCódigo: GT-P01-F01 Versión: 03 Fecha: 28/04/2011: Ministerio de Minas y EnergíaAngel OrejuelaОценок пока нет
- Protocolo Sanitario Sectorial para Prevencion Del Covid 19 SIXA 20220221 184041 655Документ30 страницProtocolo Sanitario Sectorial para Prevencion Del Covid 19 SIXA 20220221 184041 655Shadira Villegas GonzalesОценок пока нет
- Articulo BootcampДокумент14 страницArticulo BootcampCésar Melgarejo DelgadoОценок пока нет
- Guía de Aprendizaje - Excel Intermedio - 13410564Документ6 страницGuía de Aprendizaje - Excel Intermedio - 13410564Daniel Eduardo Niño CamachoОценок пока нет
- GodetДокумент23 страницыGodetJotaPunch0% (1)
- Afme U1 Ea ErvuДокумент3 страницыAfme U1 Ea ErvuERIKA JAZMIN VARGUEZ UICAB100% (1)
- RptBingoBNC 20240126095345-1Документ1 страницаRptBingoBNC 20240126095345-1guidmar mendezОценок пока нет
- UntitledДокумент40 страницUntitledAlen CardozoОценок пока нет
- Configurar y administrar pruebas con iTest 1.3Документ8 страницConfigurar y administrar pruebas con iTest 1.3José Vicente Cueva TorresОценок пока нет
- 2 Tutorial Diagrama de MasasДокумент18 страниц2 Tutorial Diagrama de MasasAnonymous QUJMWrОценок пока нет
- RECOPILACIÓNДокумент19 страницRECOPILACIÓNDAYANA NICOLE COBOS ZU�IGAОценок пока нет
- Examenes de Topografia 1 DownloableДокумент22 страницыExamenes de Topografia 1 DownloableDidier Milenio Quichca AguirreОценок пока нет