Вам также может понравиться
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- Engine 3.5L (Recuperado)Документ609 страницEngine 3.5L (Recuperado)Misael Alejandro100% (4)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Harley Davidson Sportster (2010) PartsДокумент62 страницыHarley Davidson Sportster (2010) PartsjetdedeОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Capping Machines Technical GuideДокумент12 страницCapping Machines Technical Guidekaniappan sakthivelОценок пока нет
- B2B Project On PraxairДокумент25 страницB2B Project On Praxairindsumo100% (1)
- CMPM ReviewerДокумент8 страницCMPM ReviewerRochel ClareteОценок пока нет
- VOLVO SD45D SINGLE-DRUM ROLLER Service Repair Manual PDFДокумент15 страницVOLVO SD45D SINGLE-DRUM ROLLER Service Repair Manual PDFfjjsjekdmme100% (1)
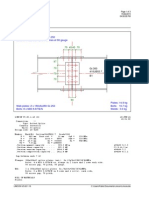
- Limcon SpliceДокумент3 страницыLimcon SpliceconorkellysligoОценок пока нет
- Sealant and Adhesives PDFДокумент95 страницSealant and Adhesives PDFjuwan decastro100% (1)
- Manual de Armado de Motor Volvo D6AДокумент32 страницыManual de Armado de Motor Volvo D6Amarcos astete100% (3)
- Manual Informacion Tecnica-Operacion y Servicio Te 804Документ38 страницManual Informacion Tecnica-Operacion y Servicio Te 804Miguel Angel Pavon CarbonellОценок пока нет
- Scada in Power Distribution Systems SeminarДокумент2 страницыScada in Power Distribution Systems Seminarsumitsinha89100% (1)
- Bunker Calculation Excel SheetДокумент1 страницаBunker Calculation Excel Sheetsumitsinha89Оценок пока нет
- ABB ADVAC Circuit Breaker Manual PDFДокумент51 страницаABB ADVAC Circuit Breaker Manual PDFsumitsinha89Оценок пока нет
- 2007 Technical HandbookДокумент148 страниц2007 Technical HandbookeriklangeveldОценок пока нет
- Exit Exm-ChemcoДокумент3 страницыExit Exm-Chemcosumitsinha89Оценок пока нет
- Hydraulic Symbology 102 - Understanding Basic Fluid Power SchematicsДокумент3 страницыHydraulic Symbology 102 - Understanding Basic Fluid Power Schematicssumitsinha89Оценок пока нет
- Crankcase Insp AeДокумент4 страницыCrankcase Insp Aesumitsinha89Оценок пока нет
- What Is Ovality of Auxiliary Engine Crank Pin?Документ62 страницыWhat Is Ovality of Auxiliary Engine Crank Pin?sumitsinha89Оценок пока нет
- Hydraulic Symbology 201 - Industrial Directional Valves PDFДокумент5 страницHydraulic Symbology 201 - Industrial Directional Valves PDFsumitsinha89Оценок пока нет
- MEO Class 2 QuestionДокумент2 страницыMEO Class 2 Questionsumitsinha8950% (2)
- Common Interview Questions: 1. "Tell Me A Little About Yourself... "Документ2 страницыCommon Interview Questions: 1. "Tell Me A Little About Yourself... "sumitsinha89Оценок пока нет
- Answer:-Repeat QuestionДокумент13 страницAnswer:-Repeat Questionsumitsinha89Оценок пока нет
- Opposed Piston Engine - 1 - Mechanical Seminar TopicsДокумент4 страницыOpposed Piston Engine - 1 - Mechanical Seminar Topicssumitsinha89Оценок пока нет
- Msds Navigo MCL Ultra ExtaДокумент9 страницMsds Navigo MCL Ultra Extasumitsinha89Оценок пока нет
- Answer:-Repeat QuestionДокумент13 страницAnswer:-Repeat Questionsumitsinha89Оценок пока нет
- Annex V Discharge Requirements For Website 3 PDFДокумент1 страницаAnnex V Discharge Requirements For Website 3 PDFMehmet AliОценок пока нет
- Manufacturing ProcessesДокумент10 страницManufacturing ProcessesRohit RadhakrishnanОценок пока нет
- Robotics Write UpДокумент19 страницRobotics Write UpLarriie MayОценок пока нет
- Flexible Manufacturing SystemsДокумент23 страницыFlexible Manufacturing SystemsAnghel Florin CatalinОценок пока нет
- Utility Systems: Course IntroductionДокумент4 страницыUtility Systems: Course IntroductionTimotius Candra KusumaОценок пока нет
- Hoyer - The History of Alternative Fuels in Transportation - The Case of Electric and Hybrid CarsДокумент9 страницHoyer - The History of Alternative Fuels in Transportation - The Case of Electric and Hybrid CarsIvan DiegoОценок пока нет
- Quick Reference: General Use Standard Size Range (Inches) Maximum Normal (FEET) Seating (FACE) Unseating (BACK)Документ21 страницаQuick Reference: General Use Standard Size Range (Inches) Maximum Normal (FEET) Seating (FACE) Unseating (BACK)graceОценок пока нет
- Project Schedule & Budget For 305018 - AДокумент12 страницProject Schedule & Budget For 305018 - AAbu Mahir MОценок пока нет
- Warehouse Cockpit Mockupsv1Документ3 страницыWarehouse Cockpit Mockupsv1Mohamed ZhranОценок пока нет
- Service Manual TrucksДокумент32 страницыService Manual TrucksΖαχος ΤσελιοςОценок пока нет
- Pressure Switch 611 GE8003Документ1 страницаPressure Switch 611 GE8003ergloc100% (1)
- Balmerol Liprex Ep SeriesДокумент2 страницыBalmerol Liprex Ep SeriesManish MaharjanОценок пока нет
- Mass Heritage of New Belgrade - PublishedДокумент7 страницMass Heritage of New Belgrade - PublishedJelica JovanovicОценок пока нет
- CPV PCM PaperДокумент9 страницCPV PCM PaperJEYASHREE CHRISTLEYОценок пока нет
- Cofferdams Forces Analysis and Design CriteriaДокумент4 страницыCofferdams Forces Analysis and Design CriteriaMarkОценок пока нет
- Walkability Index by Global Walkability Index MethodДокумент7 страницWalkability Index by Global Walkability Index MethodAnonymous kw8Yrp0R5rОценок пока нет
- Cable Extencion Marca TurckДокумент2 страницыCable Extencion Marca Turckdevol999Оценок пока нет
- 30RB060 390Документ124 страницы30RB060 390abuMalakОценок пока нет
- Balwada-July - DPRДокумент12 страницBalwada-July - DPRAKASH ROBINSONОценок пока нет
- Experimental Study On Self Compacting ConcreteДокумент9 страницExperimental Study On Self Compacting ConcreteBALAJI K S 14BCE010(KCT ALUMNI)Оценок пока нет
- Through-Tubing Gravel Packs Performed by Electric Wireline-Case HistoryДокумент11 страницThrough-Tubing Gravel Packs Performed by Electric Wireline-Case HistoryApukiОценок пока нет