Вам также может понравиться
- Thomas Malthus Ensayo Sobre El PrincipioДокумент9 страницThomas Malthus Ensayo Sobre El PrincipioJoseCarlosCastroRodriguezОценок пока нет
- Actividad de Aprendizaje 5 Evidencia 3 La Planeación Estratégica y La Gestión LogísticaДокумент21 страницаActividad de Aprendizaje 5 Evidencia 3 La Planeación Estratégica y La Gestión LogísticaJoseCarlosCastroRodriguezОценок пока нет
- Actividad de Aprendizaje 5 Evidencia 7 Agenda de Trabajo Solución de ConflictosДокумент13 страницActividad de Aprendizaje 5 Evidencia 7 Agenda de Trabajo Solución de ConflictosJoseCarlosCastroRodriguezОценок пока нет
- Actividad de Aprendizaje 7 Evidencia 2 Perfil de Clientes y ProveedoresДокумент11 страницActividad de Aprendizaje 7 Evidencia 2 Perfil de Clientes y ProveedoresJoseCarlosCastroRodriguezОценок пока нет
- Actividad de Aprendizaje 5 Evidencia 3 La Planeación Estratégica y La Gestión LogísticaДокумент21 страницаActividad de Aprendizaje 5 Evidencia 3 La Planeación Estratégica y La Gestión LogísticaJoseCarlosCastroRodriguezОценок пока нет
- Informe Circuitos en SerieДокумент5 страницInforme Circuitos en SerieXavier Allard DelgadoОценок пока нет
- Piano ArduinoДокумент5 страницPiano ArduinoMartin CastroОценок пока нет
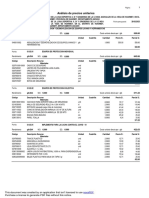
- 4.3. Analisis de Costos UnitariosДокумент3 страницы4.3. Analisis de Costos UnitariosBrayan Motta RodríguezОценок пока нет
- Trabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoДокумент46 страницTrabajo de Laboratorio de Electroneumatica-10 Practicas, ModificadoWalter Jesus100% (1)
- Aplicaciones de Las Ecuaciones CuadràticasДокумент10 страницAplicaciones de Las Ecuaciones CuadràticasDanilo MabelОценок пока нет
- Fichas y AnexosДокумент35 страницFichas y AnexosImpresiones&Copias GiovannaОценок пока нет
- Tarea 3.Документ2 страницыTarea 3.ASОценок пока нет
- Actividad 1.1 CoimДокумент11 страницActividad 1.1 CoimetienneОценок пока нет
- Curso On Line - Avanzado ETAPДокумент17 страницCurso On Line - Avanzado ETAPEduardozeusОценок пока нет
- Practica 4 Maquina ElectricasДокумент12 страницPractica 4 Maquina ElectricasBryan SalazarОценок пока нет
- Problemas 5 EBopampДокумент10 страницProblemas 5 EBopampFreddy Hernandez BecerraОценок пока нет
- Los Cinco Focos de La Mafia Colombiana 1968 1988 Elementos para Una Historia Darío Betancourt EcheverryДокумент21 страницаLos Cinco Focos de La Mafia Colombiana 1968 1988 Elementos para Una Historia Darío Betancourt EcheverryPaula VasquezОценок пока нет
- Mec LocДокумент33 страницыMec LocLauraОценок пока нет
- Partidas de TarrajeoДокумент3 страницыPartidas de TarrajeoLuis PalmaОценок пока нет
- Cuadro Comparativo Politicas de CalidadДокумент1 страницаCuadro Comparativo Politicas de CalidadDaniela Luna RodeloОценок пока нет
- PROYECTO FINAL DE LA CLASE DE Contabilidad Gerencial1Документ20 страницPROYECTO FINAL DE LA CLASE DE Contabilidad Gerencial1Lesly VillatoroОценок пока нет
- La Etapa de Globalizacion BrailovskyДокумент57 страницLa Etapa de Globalizacion BrailovskyGeorgina RomОценок пока нет
- Manual de Usuario - Cubicadora de Carne - Marca BBG - Ref - Cube-500 PDFДокумент7 страницManual de Usuario - Cubicadora de Carne - Marca BBG - Ref - Cube-500 PDFSara MarinОценок пока нет
- Ejercicios Tarea2A Jackeline CaicedoДокумент14 страницEjercicios Tarea2A Jackeline CaicedoJohnnatan Andres Figeroa Hidalgo0% (1)
- Informe Circuitos RCДокумент10 страницInforme Circuitos RCRuth Gomez CorreaОценок пока нет
- Practica 2 Turbo AssemblerДокумент49 страницPractica 2 Turbo AssemblerHumodo Acapulco100% (1)
- FESPS, Salud PúblicaДокумент8 страницFESPS, Salud PúblicaSARA MILENA VEGA MONSALVEОценок пока нет
- Universidad Nacional Micaela Bastidas de Apurímac Facultad de IngenieríaДокумент176 страницUniversidad Nacional Micaela Bastidas de Apurímac Facultad de IngenieríaManuelОценок пока нет
- Tecnologias Combinadas (Conalep)Документ5 страницTecnologias Combinadas (Conalep)griselda fabre40% (35)
- Doblado de PlanosДокумент12 страницDoblado de PlanosEdwar Vidal Sanca PacoriОценок пока нет
- Manual Servicio Cirugia InfantilДокумент28 страницManual Servicio Cirugia InfantilSebastian Alexander Orellana CartesОценок пока нет
- Las Organizaciones y El Nuevo Lugar de TrabajoДокумент22 страницыLas Organizaciones y El Nuevo Lugar de TrabajoValeria PullupaxiОценок пока нет
- Informe Tec Validez Acto Adm-005-2014-Ivp - LimonesДокумент2 страницыInforme Tec Validez Acto Adm-005-2014-Ivp - LimonesMarcel AlvaradoОценок пока нет
- El Siglo de La Biotecnología y Su Capital Humano PDFДокумент2 страницыEl Siglo de La Biotecnología y Su Capital Humano PDFLaura cristina Toro rinc�nОценок пока нет
- Inteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroОт EverandInteligencia artificial: Lo que usted necesita saber sobre el aprendizaje automático, robótica, aprendizaje profundo, Internet de las cosas, redes neuronales, y nuestro futuroРейтинг: 4 из 5 звезд4/5 (1)
- Guía para la aplicación de ISO 9001 2015От EverandGuía para la aplicación de ISO 9001 2015Рейтинг: 4 из 5 звезд4/5 (1)
- Ciencia de datos: La serie de conocimientos esenciales de MIT PressОт EverandCiencia de datos: La serie de conocimientos esenciales de MIT PressРейтинг: 5 из 5 звезд5/5 (1)
- Influencia. La psicología de la persuasiónОт EverandInfluencia. La psicología de la persuasiónРейтинг: 4.5 из 5 звезд4.5/5 (14)
- El trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.От EverandEl trading de opciones de una forma sencilla: La guía introductoria al trading de opciones y a las principales estrategias de beneficios.Рейтинг: 5 из 5 звезд5/5 (1)
- EL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.От EverandEL PLAN DE MARKETING EN 4 PASOS. Estrategias y pasos clave para redactar un plan de marketing eficaz.Рейтинг: 4 из 5 звезд4/5 (51)
- Sistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosОт EverandSistema de gestión lean para principiantes: Fundamentos del sistema de gestión lean para pequeñas y medianas empresas - con muchos ejemplos prácticosРейтинг: 4 из 5 звезд4/5 (16)
- Agile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanОт EverandAgile: Una guía para la Gestión de Proyectos Agile con Scrum, Kanban y LeanРейтинг: 5 из 5 звезд5/5 (1)
- Clics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaОт EverandClics contra la humanidad: Libertad y resistencia en la era de la distracción tecnológicaРейтинг: 4.5 из 5 звезд4.5/5 (117)
- Python Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREОт EverandPython Paso a paso: PROGRAMACIÓN INFORMÁTICA/DESARROLLO DE SOFTWAREРейтинг: 4 из 5 звезд4/5 (13)
- Conquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesОт EverandConquista de las Redes Sociales: 201 Consejos para Marketeros y Emprendedores DigitalesРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Excel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másОт EverandExcel para principiantes: Aprenda a utilizar Excel 2016, incluyendo una introducción a fórmulas, funciones, gráficos, cuadros, macros, modelado, informes, estadísticas, Excel Power Query y másРейтинг: 2.5 из 5 звезд2.5/5 (3)
- Excel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteОт EverandExcel y SQL de la mano: Trabajo con bases de datos en Excel de forma eficienteРейтинг: 1 из 5 звезд1/5 (1)