Вам также может понравиться
- E Strident OpolisДокумент16 страницE Strident OpolisHermosillaОценок пока нет
- CriticaДокумент1 страницаCriticaHermosillaОценок пока нет
- Gabriel Garci A Ma Rquez - So Lo Vine A Hablar Por Tele FonoДокумент13 страницGabriel Garci A Ma Rquez - So Lo Vine A Hablar Por Tele FonoHermosillaОценок пока нет
- La Desgracia de Ser FelizДокумент2 страницыLa Desgracia de Ser FelizHermosillaОценок пока нет
- Como Entender y Hacer Demostraciones Matematicas PDFДокумент181 страницаComo Entender y Hacer Demostraciones Matematicas PDFJosé María Silvano García Arellano100% (1)
- Triptico ShogiДокумент2 страницыTriptico ShogiHermosillaОценок пока нет
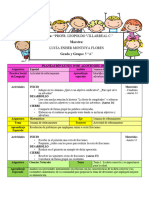
- Planeacion Quinto Grado PrimariaДокумент8 страницPlaneacion Quinto Grado Primarialucyle3103Оценок пока нет
- Breve Historia de La Escuela en VenezuelaДокумент19 страницBreve Historia de La Escuela en VenezuelaAnonymous LbXaayОценок пока нет
- Tarea Criterios Maximin y MaximaxДокумент3 страницыTarea Criterios Maximin y MaximaxJorge Pablo Ordemar CisnerosОценок пока нет
- Ecuaciones Diferenciales Exactas PresentaciónДокумент19 страницEcuaciones Diferenciales Exactas PresentaciónJarod Delgado AlarcónОценок пока нет
- Pud 4 Matematicas LiceoДокумент13 страницPud 4 Matematicas LiceoLigia VelezОценок пока нет
- Fisica IДокумент5 страницFisica IMauro Jesús Zambrana CastroОценок пока нет
- TGT 408Документ62 страницыTGT 408Miguel AngelОценок пока нет
- Unidad 1Документ20 страницUnidad 1Javier G Zapiain SalinasОценок пока нет
- Informe 4 Fuerza de Arrastre CompletoДокумент8 страницInforme 4 Fuerza de Arrastre Completoandres guerreroОценок пока нет
- Práctica 6 - ALUДокумент11 страницPráctica 6 - ALUMitzi Nyahn OrozcoОценок пока нет
- InformeДокумент18 страницInformePaola Maribel GuamanОценок пока нет
- Construcción y Evidencias de Los Procesos Psicométricos de La Escala de Duelo en Adolescentes Frente Al Covid-19 en La Ciudad de Piura - 2021Документ55 страницConstrucción y Evidencias de Los Procesos Psicométricos de La Escala de Duelo en Adolescentes Frente Al Covid-19 en La Ciudad de Piura - 2021Nicole Fernanda Gordillo TavaraОценок пока нет
- 03 Clase 1 de Cálculo de Cortocircuitos - Trabajo en ClasesДокумент5 страниц03 Clase 1 de Cálculo de Cortocircuitos - Trabajo en ClasessimonОценок пока нет
- FG1 - S05 - PPT - Segunda Condición de EquilibrioДокумент16 страницFG1 - S05 - PPT - Segunda Condición de EquilibrioCarlos Rojas toledoОценок пока нет
- 2 Raz - Matemàtico PRДокумент4 страницы2 Raz - Matemàtico PRNelson Adrian Mantilla AraujoОценок пока нет
- Hammer H35Ds - H180Es Prod Bulletin (GSJH2020-03) AsДокумент56 страницHammer H35Ds - H180Es Prod Bulletin (GSJH2020-03) AsGARY BAUTISTA100% (1)
- Mecanica de Fluidos II. Sesion #14Документ28 страницMecanica de Fluidos II. Sesion #14Diego BarbozaОценок пока нет
- Guía 1 - Lógica Recreativa IДокумент8 страницGuía 1 - Lógica Recreativa ICarlos Alberto Mauri EstañaОценок пока нет
- Laboratorio Dilatacion TermicaДокумент7 страницLaboratorio Dilatacion TermicaVanessita PazОценок пока нет
- ArimeticaДокумент6 страницArimeticaAbner Acho AricariОценок пока нет
- PRUEBA 6° Mats PIEДокумент10 страницPRUEBA 6° Mats PIELORETO VEASОценок пока нет
- Estructuralismo BernardoДокумент75 страницEstructuralismo BernardoManuela Loaiza AristizabalОценок пока нет
- Pensum PetroleoДокумент1 страницаPensum Petroleoluis layaОценок пока нет
- Problemas de Geometría o Problemas Con La GeometríaДокумент2 страницыProblemas de Geometría o Problemas Con La GeometríaHeidy Vásquez0% (1)
- Ejemplo SДокумент9 страницEjemplo SCarlos Alberto Aroca PerdomoОценок пока нет
- Determinantes de La Inflación MultipleДокумент29 страницDeterminantes de La Inflación MultipleAlejandra BonillaОценок пока нет
- La Novedad Teórica Del Día: Por El GM Juan Sebastián MorgadoДокумент4 страницыLa Novedad Teórica Del Día: Por El GM Juan Sebastián MorgadoJohn DelgadoОценок пока нет
- Deduccion ProposicionalДокумент7 страницDeduccion ProposicionalManuel Orlando Zamata Sanchez100% (1)
- Resolución Práctica RelacionesДокумент21 страницаResolución Práctica RelacionesROLY HUAMANОценок пока нет
- Demostración de Los Principios de Caída LibreДокумент6 страницDemostración de Los Principios de Caída LibreJuan C. ZepedaОценок пока нет