Вам также может понравиться
- Make A Mind Controlled Arduino RobotДокумент96 страницMake A Mind Controlled Arduino RobotSaraniti GiuseppeОценок пока нет
- Raspberry Pi 2 The Essential Step by Step Beginner's User PDFДокумент85 страницRaspberry Pi 2 The Essential Step by Step Beginner's User PDFKhedotGloryaОценок пока нет
- Bots! Robotics Engineering: with Hands-On Makerspace ActivitiesОт EverandBots! Robotics Engineering: with Hands-On Makerspace ActivitiesРейтинг: 5 из 5 звезд5/5 (2)
- Automatic Sprinkler System Using Arduino.: G M Barbade, Mahajan Vasudha, Pasarge Sanika, Shinde SandhyaДокумент5 страницAutomatic Sprinkler System Using Arduino.: G M Barbade, Mahajan Vasudha, Pasarge Sanika, Shinde SandhyaHanan ShayiboОценок пока нет
- Path Finder Autonomous RobotДокумент6 страницPath Finder Autonomous RobotIJRASETPublicationsОценок пока нет
- 295-303-chd994 Word Etsr PDFДокумент9 страниц295-303-chd994 Word Etsr PDFchaitanya sОценок пока нет
- Smart Railway Track System Using RFID: Rahul P. Kamdi Prasheel Thakre Sandeep TiwariДокумент8 страницSmart Railway Track System Using RFID: Rahul P. Kamdi Prasheel Thakre Sandeep TiwariDejanIricОценок пока нет
- Design and Implementation of FPGA Based Quadcopter: G PremkumarДокумент5 страницDesign and Implementation of FPGA Based Quadcopter: G Premkumarchaitanya sОценок пока нет
- Development and Construction of An Autonomous Firefighting RobotДокумент8 страницDevelopment and Construction of An Autonomous Firefighting RobotInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Fire Extinguishing RobotДокумент4 страницыFire Extinguishing RobotShree Krishna TaraiОценок пока нет
- Password Based Automated Gate Locking System Using ARM Controller LPC2148Документ3 страницыPassword Based Automated Gate Locking System Using ARM Controller LPC2148lenchoОценок пока нет
- Automatic Smart Parking System Using Internet of Things (IOT)Документ4 страницыAutomatic Smart Parking System Using Internet of Things (IOT)Suresh V ReddyОценок пока нет
- FPGA Implementation of Biometric Based Elevator Controller: March 2018Документ10 страницFPGA Implementation of Biometric Based Elevator Controller: March 2018Anusha DОценок пока нет
- Embedded Based Fire Detection and Fighting Robot Using IoT For Industrial EnvironmentДокумент4 страницыEmbedded Based Fire Detection and Fighting Robot Using IoT For Industrial Environmentgn45591Оценок пока нет
- Fire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionДокумент3 страницыFire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionEditor IJTSRDОценок пока нет
- Fire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionДокумент3 страницыFire Fighting Robot Using Arduino and Motor Drivers With Obstacle DetectionEditor IJTSRDОценок пока нет
- Design and Analysis The Fire Fighting RobotДокумент6 страницDesign and Analysis The Fire Fighting RobotGopi ChandОценок пока нет
- Final Copy of Line Follower RobotДокумент10 страницFinal Copy of Line Follower RobotPhạm Tành ĐồngОценок пока нет
- Fire Extinguisher RobotДокумент23 страницыFire Extinguisher RobotIJRASETPublicationsОценок пока нет
- Obstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Документ4 страницыObstacle Avoidance Robot Using Arduino IJERTCONV6IS13197Xaf FarОценок пока нет
- Remote Controlled Fire Fighting RobotДокумент7 страницRemote Controlled Fire Fighting RobotEditor IJTSRDОценок пока нет
- Intelligent Braking System: International Journal of ResearchДокумент3 страницыIntelligent Braking System: International Journal of ResearchNaga sai kiranОценок пока нет
- RayaДокумент14 страницRayaMohammedОценок пока нет
- Wireless Fire Fighting Robot: Swati A. Deshmukh, Karishma A. Matte and Rashmi A. PandhareДокумент3 страницыWireless Fire Fighting Robot: Swati A. Deshmukh, Karishma A. Matte and Rashmi A. PandhareDJahar Irawanz Pradipta100% (1)
- Human Following Robot Using Arduino UnoДокумент5 страницHuman Following Robot Using Arduino Unopk rahimОценок пока нет
- Review Paper On Arduino Based Fire Fighting RobotДокумент8 страницReview Paper On Arduino Based Fire Fighting RobotIJRASETPublicationsОценок пока нет
- Live Human Detecting Robot For Earthquak PDFДокумент3 страницыLive Human Detecting Robot For Earthquak PDFsiddharthОценок пока нет
- Paper 1025Документ4 страницыPaper 1025Ankitha ShettyОценок пока нет
- Fire Fighting RobortДокумент72 страницыFire Fighting RobortpandiОценок пока нет
- Review Paper On Arduino Based Fire Fighting Robot-with-cover-page-V2Документ9 страницReview Paper On Arduino Based Fire Fighting Robot-with-cover-page-V2Tiffany DagatanОценок пока нет
- Chapter 1Документ40 страницChapter 1Rajni ShelkeОценок пока нет
- Fin Irjmets1684126285Документ10 страницFin Irjmets1684126285arafarhossain45Оценок пока нет
- Goutam JeeralaДокумент7 страницGoutam JeeralaAkshay GargОценок пока нет
- 2K22 - Rep - Iot Based Robot For Fire ExtinguisherДокумент33 страницы2K22 - Rep - Iot Based Robot For Fire ExtinguisherRaju'K HalgyeОценок пока нет
- SR 21705175854Документ5 страницSR 21705175854Brendon GovereОценок пока нет
- Participation of Disability People To Working and Learning Envıronments With The Help of RobotsДокумент10 страницParticipation of Disability People To Working and Learning Envıronments With The Help of RobotsInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Babu Banarasi Das National Institute of Technology and Management LucknowДокумент11 страницBabu Banarasi Das National Institute of Technology and Management LucknowPrajjwalKumarОценок пока нет
- Object Detection and Collision Avoidance With Train Using GSMДокумент4 страницыObject Detection and Collision Avoidance With Train Using GSMBereket LemmaОценок пока нет
- Smart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatДокумент8 страницSmart Stick For Blind Man: Nitish Sukhija, Shruti Taksali, Mohit Jain and Rahul KumawatE-zat IlmanОценок пока нет
- Fin Irjmets1656864689Документ4 страницыFin Irjmets1656864689rassОценок пока нет
- Line Follower Robot ThesisДокумент5 страницLine Follower Robot Thesisafktciaihzjfyr100% (1)
- 1 SMДокумент10 страниц1 SMTiffany DagatanОценок пока нет
- Solar Using Line Follower-567Документ10 страницSolar Using Line Follower-567TadeuОценок пока нет
- Design and Fabrication of Automated Fire Fighting RobotДокумент9 страницDesign and Fabrication of Automated Fire Fighting RobotIJRASETPublicationsОценок пока нет
- Paper 26Документ5 страницPaper 26vivekgorasiya32Оценок пока нет
- Swarm Intelligence Based Fire Fighting RobotДокумент6 страницSwarm Intelligence Based Fire Fighting RobotIJAERS JOURNALОценок пока нет
- International Journal of Robotics and Automation (IJRA) Volume 2 Issue 1Документ87 страницInternational Journal of Robotics and Automation (IJRA) Volume 2 Issue 1AI Coordinator - CSC JournalsОценок пока нет
- CSE JournalsДокумент12 страницCSE Journalsgraphic designerОценок пока нет
- War Field Spying Robot Controlled by Raspberry PiДокумент7 страницWar Field Spying Robot Controlled by Raspberry PiIJRASETPublicationsОценок пока нет
- Phase Fault Analysis of Three Phase System With Auto Reset For Temporary Fault and Trip For Permanent FaultДокумент9 страницPhase Fault Analysis of Three Phase System With Auto Reset For Temporary Fault and Trip For Permanent FaultPrem BadheОценок пока нет
- Automatic Fire Extinguishing Robotic VehicleДокумент2 страницыAutomatic Fire Extinguishing Robotic VehiclerajeshОценок пока нет
- Home Automation Using Arduino and IOTДокумент4 страницыHome Automation Using Arduino and IOTInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Wireless Control of Pick and Place Robotic Arm Using An Android ApplicationДокумент7 страницWireless Control of Pick and Place Robotic Arm Using An Android ApplicationChandan Kumar SharmaОценок пока нет
- Library Management Robot: Bomble Pranit R. G. Dipika Dr. ShaikhmeeravaliДокумент4 страницыLibrary Management Robot: Bomble Pranit R. G. Dipika Dr. ShaikhmeeravaliAnandu KBОценок пока нет
- Military Support and Rescue RobotДокумент7 страницMilitary Support and Rescue RobotIJRASETPublicationsОценок пока нет
- Warehouse Management BOT Using ArduinoДокумент6 страницWarehouse Management BOT Using ArduinoIJRASETPublicationsОценок пока нет
- 105 SmartДокумент4 страницы105 SmarttasibkhanОценок пока нет
- B0610011017 PDFДокумент8 страницB0610011017 PDFEdiОценок пока нет
- Smart and Intelligent Line Follower Robot With Obstacle DetectionДокумент6 страницSmart and Intelligent Line Follower Robot With Obstacle DetectionIndian MusicОценок пока нет
- Android Controlled Fire Fighting RobotДокумент5 страницAndroid Controlled Fire Fighting RobotIJSTEОценок пока нет
- Engineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringОт EverandEngineering the Future at the Intersection: Groundbreaking Advances in Mechanical EngineeringОценок пока нет
- Arduino Digital VoltmeterДокумент5 страницArduino Digital VoltmeterjuanОценок пока нет
- PhaseДокумент14 страницPhaseDesaigouda S TОценок пока нет
- Indiapaper 4Документ7 страницIndiapaper 4KEVIN DILAN RANGEL CAMPOSОценок пока нет
- Voice Controlled Robotic System Using Arduino MicrocontrollerДокумент3 страницыVoice Controlled Robotic System Using Arduino MicrocontrollerageesОценок пока нет
- A Line Follower Robot With Obstacle Detection by Ultrasonic: December 2019Документ5 страницA Line Follower Robot With Obstacle Detection by Ultrasonic: December 2019Khairul BasirОценок пока нет
- Project Report P-7Документ25 страницProject Report P-7Mota MihirОценок пока нет
- Dramboard ManualДокумент3 страницыDramboard ManualGlauco MouraОценок пока нет
- Prototyping of Heart Rate and SpO - 2 Measurement Using MAX30100Документ11 страницPrototyping of Heart Rate and SpO - 2 Measurement Using MAX30100Rich LeeОценок пока нет
- IOT PracticalДокумент10 страницIOT PracticalParmar ManthanОценок пока нет
- Design Engineering: Intelligent Traffic Control System For Congestion Control, Emergency Vehicle Clearance and StolenДокумент8 страницDesign Engineering: Intelligent Traffic Control System For Congestion Control, Emergency Vehicle Clearance and Stolenharsha RОценок пока нет
- Iot Based Home Automation Using ArduinoДокумент55 страницIot Based Home Automation Using ArduinoSiddharth SidhuОценок пока нет
- Timer Interrupts: Here Arduino Due Forum PostДокумент7 страницTimer Interrupts: Here Arduino Due Forum PostAlbert DeluqueОценок пока нет
- Smart Helmet PPT Final Year AdvancedДокумент20 страницSmart Helmet PPT Final Year AdvancedAnubhab DasОценок пока нет
- Product User Guide JY MCU Bluetooth UART R1 0Документ8 страницProduct User Guide JY MCU Bluetooth UART R1 0Gilberto Cruz RuizОценок пока нет
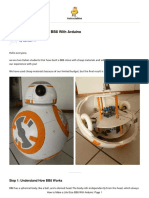
- How To Make A Life Size BB8 With ArduinoДокумент11 страницHow To Make A Life Size BB8 With ArduinoDaniel MarceloОценок пока нет
- Arduino Playground - MPU-6050Документ28 страницArduino Playground - MPU-6050DragoșОценок пока нет
- Super Starter Kit For Arduino UnoДокумент169 страницSuper Starter Kit For Arduino UnoGotfried GaussОценок пока нет
- Lab Manual - RA3CO35 - Embedded SystemsДокумент24 страницыLab Manual - RA3CO35 - Embedded SystemsPoonam singhОценок пока нет
- xc4411 Setup Guide-1Документ7 страницxc4411 Setup Guide-1fahadОценок пока нет
- Actuation of Electro-Pneumatic System Using MATLAB Simulink and Arduino Controller-A Case of A Mechatronics Systems LabДокумент6 страницActuation of Electro-Pneumatic System Using MATLAB Simulink and Arduino Controller-A Case of A Mechatronics Systems LabHêny CarlênicОценок пока нет
- Smart Bus Alert System For Easy Navigation of The BlindДокумент4 страницыSmart Bus Alert System For Easy Navigation of The BlindIJRASETPublicationsОценок пока нет
- RahulДокумент8 страницRahulvidhya associateОценок пока нет
- 2 Obstacle Avoiding Robot PDFДокумент7 страниц2 Obstacle Avoiding Robot PDFRaj AryanОценок пока нет
- Arduino® Nicla Sense ME: DescriptionДокумент22 страницыArduino® Nicla Sense ME: DescriptionAsifОценок пока нет
- Ch.5 Delta Robot ControlДокумент4 страницыCh.5 Delta Robot ControlAhmed ElkershОценок пока нет
- M-Duino 21+Arduino-PLCДокумент3 страницыM-Duino 21+Arduino-PLCJes TecnosОценок пока нет
- SYBSc Electronics Autonomy SyllabusДокумент9 страницSYBSc Electronics Autonomy SyllabusprashantsheetalОценок пока нет