Вам также может понравиться
- Diagrama C13 LeeДокумент26 страницDiagrama C13 LeeTDVOMОценок пока нет
- Kubota V Manual KX61 3 KX71 3 PDFДокумент136 страницKubota V Manual KX61 3 KX71 3 PDFAnonymous hxV81ITD8k88% (8)
- Kubota V Manual U20!3!25 31Документ508 страницKubota V Manual U20!3!25 31brunosamaeian82% (11)
- Handbook of Diesel Engines - CommonRailДокумент15 страницHandbook of Diesel Engines - CommonRail19cm100% (2)
- Complete List of Cummins Celect Fault CodesДокумент3 страницыComplete List of Cummins Celect Fault CodesEduardo TorresОценок пока нет
- Piezo InjectorДокумент24 страницыPiezo InjectorJozsi Szabo100% (9)
- Robert Bosch GMBH - Gasoline-Engine Management Basics ComponentsДокумент89 страницRobert Bosch GMBH - Gasoline-Engine Management Basics ComponentsThang Tong100% (6)
- K3VL Parts List Updated05 10 2017 PDFДокумент17 страницK3VL Parts List Updated05 10 2017 PDFJonathan GiraldoОценок пока нет
- Bosch Distributor Pump VeДокумент8 страницBosch Distributor Pump Vegire_3pich2005Оценок пока нет
- K3VL Presentation 2010 MDДокумент15 страницK3VL Presentation 2010 MDHamza Lashin100% (2)
- Suzuki A100 KatalogДокумент47 страницSuzuki A100 KatalogRamadhan OdeОценок пока нет
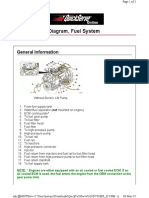
- 200-001 Flow Diagram, Fuel System: General InformationДокумент3 страницы200-001 Flow Diagram, Fuel System: General InformationbejoythomasОценок пока нет
- Manifold BlockДокумент31 страницаManifold Blockbrunosamaeian0% (1)
- Inspection and Adjustment of Pump Ls ControlДокумент10 страницInspection and Adjustment of Pump Ls ControlHai Van100% (1)
- Aops PDFДокумент3 страницыAops PDFHaryОценок пока нет
- Manual Motor MRD 1100Документ40 страницManual Motor MRD 1100brotaccristianОценок пока нет
- Caterpillar Main Engine C32 SDN Part Manual Sebp6147 1Документ386 страницCaterpillar Main Engine C32 SDN Part Manual Sebp6147 1Asep Shaifurrahman93% (15)
- Group 11e Engine Mechanical - PDFДокумент52 страницыGroup 11e Engine Mechanical - PDFm.fadhlyaugustami fadhlyОценок пока нет
- Repfllr Pflrts . . I: at BoschДокумент4 страницыRepfllr Pflrts . . I: at BoschEng-Mohammed SalemОценок пока нет
- RE 00112 - Part 1 Hydraulic Components For Industrial ApplicationsДокумент1 008 страницRE 00112 - Part 1 Hydraulic Components For Industrial Applicationsbee140676100% (2)
- Diesel Generator 450KW Spec SheetДокумент7 страницDiesel Generator 450KW Spec SheetMohamed Abd ElazizОценок пока нет
- Parts Catalog for Soil Compactor Cylinder Block and CrankshaftДокумент150 страницParts Catalog for Soil Compactor Cylinder Block and Crankshaftvan long Bui100% (2)
- P2 Series InstallationlManualДокумент6 страницP2 Series InstallationlManualxxshОценок пока нет
- Bent Axis Motors: Series 51 Two Position ControlsДокумент48 страницBent Axis Motors: Series 51 Two Position ControlsbrunosamaeianОценок пока нет
- Bent Axis Motors: Series 51 Two Position ControlsДокумент48 страницBent Axis Motors: Series 51 Two Position ControlsbrunosamaeianОценок пока нет
- The Audi 1.8L and 2.0L Third Generation Ea888 Engines: Eself-Study Program 920243Документ72 страницыThe Audi 1.8L and 2.0L Third Generation Ea888 Engines: Eself-Study Program 920243sergio ulises santi huashuaОценок пока нет
- PVEU - PVE For 0-10V Voltage Control: Confidential InformationДокумент12 страницPVEU - PVE For 0-10V Voltage Control: Confidential InformationbrunosamaeianОценок пока нет
- Table of Contents For Maintenance Manual: SulzlrДокумент40 страницTable of Contents For Maintenance Manual: Sulzlrpendik kuswoyoОценок пока нет
- Re92004 PDFДокумент72 страницыRe92004 PDFsuriantoОценок пока нет
- TW7 TW9 TW10 Service-Manual en PDFДокумент258 страницTW7 TW9 TW10 Service-Manual en PDFbrunosamaeianОценок пока нет
- Liebherr Subsea Offshore Cranes RL-K AHC Active Heave Compensation Brochure 12904-0Документ4 страницыLiebherr Subsea Offshore Cranes RL-K AHC Active Heave Compensation Brochure 12904-0brunosamaeianОценок пока нет
- K3V Hyd PumpДокумент4 страницыK3V Hyd Pumpbrunosamaeian100% (1)
- A10VSO - Qmax SETДокумент1 страницаA10VSO - Qmax SETbrunosamaeianОценок пока нет
- GM Maintenance Catalog Hydraulic MotorДокумент45 страницGM Maintenance Catalog Hydraulic MotorabdonmendozaОценок пока нет
- PDF At115 2002 NouvoДокумент293 страницыPDF At115 2002 NouvoSyahrom NiezamОценок пока нет
- Catalog - SolenoidДокумент37 страницCatalog - SolenoidMIHAIОценок пока нет
- Injector Installation 107 EngineДокумент5 страницInjector Installation 107 EnginevalterripОценок пока нет
- Sp-Spv40-46-E 2-41701 2000-01-21Документ132 страницыSp-Spv40-46-E 2-41701 2000-01-21Aan TeeОценок пока нет
- Hydraguide Hydrostatic Steering System: HydraulicsДокумент46 страницHydraguide Hydrostatic Steering System: HydraulicsfernandojimenezdeОценок пока нет
- P1-PD 18cc-140cc Service ManualДокумент64 страницыP1-PD 18cc-140cc Service ManualGianna FrolaОценок пока нет
- C Series engine-121-SM-02-D PDFДокумент49 страницC Series engine-121-SM-02-D PDFRina Sumardi100% (2)
- Type OSPB, OSPC and OSPF PDFДокумент32 страницыType OSPB, OSPC and OSPF PDFmusafirОценок пока нет
- Trouble Shooting Rexroth Hydraulic Pump A4VG SeriesДокумент3 страницыTrouble Shooting Rexroth Hydraulic Pump A4VG Seriessridhar100% (1)
- PSL-2 Seal KitДокумент10 страницPSL-2 Seal KitbrunosamaeianОценок пока нет
- Mobile Division Service Parts List A10VO Series 31 Size 28Документ52 страницыMobile Division Service Parts List A10VO Series 31 Size 28Samy SamОценок пока нет
- MPV R 01 en PDFДокумент35 страницMPV R 01 en PDFEustahije BrzicОценок пока нет
- tp6258 MITSUBISHI GENERADORДокумент72 страницыtp6258 MITSUBISHI GENERADORMarcos Vinicio Stizzioli100% (1)
- Gear Pump PGP511Документ11 страницGear Pump PGP511Ayman AlhalfawyОценок пока нет
- Active Heave Compensation Winch System - ACE Winches PDFДокумент24 страницыActive Heave Compensation Winch System - ACE Winches PDFxxshОценок пока нет
- Bomba Sauer Partes m40-m46Документ132 страницыBomba Sauer Partes m40-m46fercsl100% (3)
- AA4VGДокумент68 страницAA4VGPutut SuprihartonoОценок пока нет
- Pvh131 141 Variable Disp Piston Pump 11 Design PLL - 1444Документ9 страницPvh131 141 Variable Disp Piston Pump 11 Design PLL - 1444Agus Yulfizar100% (1)
- HY11-3362 Press Control PPCC UKДокумент40 страницHY11-3362 Press Control PPCC UKLucas Cardoso100% (1)
- PV 48Документ12 страницPV 48thierrylindoОценок пока нет
- Series 45 Frame J 45-75 CC Parts ManualДокумент388 страницSeries 45 Frame J 45-75 CC Parts ManualRodrigues de OliveiraОценок пока нет
- Repair Pa Rts Sheet P - 3 9 1, 1004 / P-392, 1 0 0 5Документ2 страницыRepair Pa Rts Sheet P - 3 9 1, 1004 / P-392, 1 0 0 5JPJFОценок пока нет
- Ra 92003 PDFДокумент35 страницRa 92003 PDFferdyak1100% (1)
- Closed Circuit Axial Piston Pumps: Service ManualДокумент36 страницClosed Circuit Axial Piston Pumps: Service ManualSmolovic SrdjanОценок пока нет
- Eaton 420 PartsДокумент16 страницEaton 420 PartsF Labio Alex100% (1)
- Steering Unit: EH Electro Proportional Hydraulic Valve In-Line VersionДокумент20 страницSteering Unit: EH Electro Proportional Hydraulic Valve In-Line VersionbrunosamaeianОценок пока нет
- 520l0553 PDFДокумент52 страницы520l0553 PDFVasil TsvetanovОценок пока нет
- Johnston 5000 Series Service Training InformationДокумент63 страницыJohnston 5000 Series Service Training InformationVygintas BalciusОценок пока нет
- A2fm 70Документ24 страницыA2fm 70SunilОценок пока нет
- Parts Manual Motor Sauer Serie 20Документ28 страницParts Manual Motor Sauer Serie 20Jorge CabreraОценок пока нет
- Turbocharger SurgingДокумент28 страницTurbocharger SurgingVitmannОценок пока нет
- PVG 16 and PVG 32 Service Assembly/ Disassembly GuideДокумент28 страницPVG 16 and PVG 32 Service Assembly/ Disassembly Guidephankhoa83-1Оценок пока нет
- Rexroth PumpsДокумент24 страницыRexroth PumpsAmanda SmithОценок пока нет
- Duplo MaticДокумент8 страницDuplo MaticHENRYGALLEGOSОценок пока нет
- Valve: Multiple Control Valve: Basic Circuit (Parallel, Tandem, and Series Circuits)Документ18 страницValve: Multiple Control Valve: Basic Circuit (Parallel, Tandem, and Series Circuits)KadirОценок пока нет
- Bomba ParkerДокумент80 страницBomba Parkerhugo lunaОценок пока нет
- GD705A-5 Adjusting ValveДокумент3 страницыGD705A-5 Adjusting ValveSurya FaniОценок пока нет
- Part - Kobelco SK07 N2Документ3 страницыPart - Kobelco SK07 N2boy qsiОценок пока нет
- Control LR2G RexrothДокумент10 страницControl LR2G RexrothMiguel Angel LopezОценок пока нет
- Hy17-8802-M1 Uk H170CFДокумент36 страницHy17-8802-M1 Uk H170CFJulio lucioОценок пока нет
- Hy17 8523 UkДокумент6 страницHy17 8523 Ukexay40Оценок пока нет
- Parker Cylinder PDFДокумент84 страницыParker Cylinder PDFRavi Chaitanya VelamarthyОценок пока нет
- Staffa Fixed Displacement Hydraulic Motor: Kawasaki Motors Corp., U.S.AДокумент12 страницStaffa Fixed Displacement Hydraulic Motor: Kawasaki Motors Corp., U.S.AUsama PopatiaОценок пока нет
- HATZ 1D41 1D42 1D50 1D81 1D90 Diesel IMДокумент39 страницHATZ 1D41 1D42 1D50 1D81 1D90 Diesel IMEdmundas ŽemaitisОценок пока нет
- Generator Safety and Operation ManualДокумент78 страницGenerator Safety and Operation Manualcbeckdorf100% (1)
- Cylinder head gasket and set catalogДокумент999 страницCylinder head gasket and set catalogdouahchia rachedОценок пока нет
- Parts Information: Char-LynnДокумент5 страницParts Information: Char-LynnRidha AbbassiОценок пока нет
- 40708x20c - Rasentraktor 40707x65aДокумент14 страниц40708x20c - Rasentraktor 40707x65abwadsagerОценок пока нет
- Valves Barendsen PDFДокумент63 страницыValves Barendsen PDFidontlikeebooksОценок пока нет
- A 10 VoДокумент23 страницыA 10 VoMahmoud SaudyОценок пока нет
- AP2D Series PumpДокумент12 страницAP2D Series PumpSoeLettОценок пока нет
- SD 6 eДокумент16 страницSD 6 eseaqu3stОценок пока нет
- So, You Think You Know Shuttle Valves?Документ6 страницSo, You Think You Know Shuttle Valves?AkileshОценок пока нет
- AX27 - 50u-5f Service ManualДокумент8 страницAX27 - 50u-5f Service ManualMb0% (1)
- February 2016Документ128 страницFebruary 2016Pumper Magazine0% (1)
- Radiator FlushДокумент7 страницRadiator FlushmichaelguzziОценок пока нет
- CP CatalogДокумент20 страницCP CatalogCentral Hydraulics100% (1)
- VAG HYsec Hydraulic Brake and Lift UnitДокумент3 страницыVAG HYsec Hydraulic Brake and Lift UnitLuka Borna100% (1)
- Bul 947015aДокумент14 страницBul 947015asssydorenkoОценок пока нет
- Robot Drive Systems and End Effectors GuideДокумент84 страницыRobot Drive Systems and End Effectors GuideSatheesh KumarОценок пока нет
- Unit-II: Robot Drive Systems and End EffectorsДокумент81 страницаUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarОценок пока нет
- Tutorial 3 19BME069Документ14 страницTutorial 3 19BME06920BME005 INAM SABRIОценок пока нет
- Series 51 - HZ, HA, HB, HE, HS, H1, H2, K1, K2, HP, HC, J1, J2, J3, J4, JAДокумент40 страницSeries 51 - HZ, HA, HB, HE, HS, H1, H2, K1, K2, HP, HC, J1, J2, J3, J4, JAbrunosamaeianОценок пока нет
- Electrohydraulic Controls Series 51: A7, D7, D8, DA, DC, EE, EP, EQ, ER, ES, L1, L2, L7Документ46 страницElectrohydraulic Controls Series 51: A7, D7, D8, DA, DC, EE, EP, EQ, ER, ES, L1, L2, L7brunosamaeianОценок пока нет
- 11026745Документ24 страницы11026745Franklin Silva GomezОценок пока нет
- Danfos PVREДокумент6 страницDanfos PVREslawny77Оценок пока нет
- A4VSO Flushing GicleurДокумент1 страницаA4VSO Flushing GicleurbrunosamaeianОценок пока нет
- Norma CardДокумент1 страницаNorma CardbrunosamaeianОценок пока нет
- Rexroth A4VSO Flushing PrincipleДокумент1 страницаRexroth A4VSO Flushing PrinciplebrunosamaeianОценок пока нет
- E3554-0!06!11 - Dks - LQ Hydac Double HP LP Piston AccumulatorДокумент14 страницE3554-0!06!11 - Dks - LQ Hydac Double HP LP Piston AccumulatorbrunosamaeianОценок пока нет
- PSL-3 Seal KitДокумент12 страницPSL-3 Seal KitbrunosamaeianОценок пока нет
- Bonded Seal Information and Sizing ChartДокумент17 страницBonded Seal Information and Sizing ChartPrabhakarannk KirupakaranОценок пока нет
- PSL-4 Seal KitДокумент14 страницPSL-4 Seal Kitbrunosamaeian100% (1)
- 345C/365C & 385C Hydraulic Excavator Service Training in MalagaДокумент14 страниц345C/365C & 385C Hydraulic Excavator Service Training in MalagaMilorad Zelenovic100% (1)
- 2003-2004 SRT-4 Stage 3R Turbo I SheetДокумент8 страниц2003-2004 SRT-4 Stage 3R Turbo I SheetRene SanchezОценок пока нет
- 24-20 Fuel System Pressure and Residual Pressure Checking PDFДокумент7 страниц24-20 Fuel System Pressure and Residual Pressure Checking PDFmefisto06cОценок пока нет
- Cylinder Head and Valves/Special Tools: RG5100 - UN-23AUG88Документ21 страницаCylinder Head and Valves/Special Tools: RG5100 - UN-23AUG88WSMengine WSMengineОценок пока нет
- Timing Advance Processor NewДокумент42 страницыTiming Advance Processor NewPhonthep YimsukananОценок пока нет
- Temporary Revision Number 7: © Cessna Aircraft CompanyДокумент6 страницTemporary Revision Number 7: © Cessna Aircraft CompanyVIMAER Vidotti Manutenção Aeronáutica LTDAОценок пока нет
- D10 Diesel Engine Series: Diesel Engines Are Certified As Wor Ld's Most Environmentally Friendly Mechanical EnginesДокумент4 страницыD10 Diesel Engine Series: Diesel Engines Are Certified As Wor Ld's Most Environmentally Friendly Mechanical Enginestotcsab50% (2)
- A2c5329064080 Vdo-OemДокумент5 страницA2c5329064080 Vdo-OemhiramfgarciaОценок пока нет
- Additions, Revisions, or Updates: Subject DateДокумент3 страницыAdditions, Revisions, or Updates: Subject DateAlvaro Uribe MuñozОценок пока нет
- 3.1524 27.9kw (Tpd1448e-2) PDFДокумент6 страниц3.1524 27.9kw (Tpd1448e-2) PDFLakshan WeliwattaОценок пока нет
- Unit 15 Aircraft Propulsion AssignmentДокумент18 страницUnit 15 Aircraft Propulsion AssignmentTerrence Owens50% (2)
- NGK NTK Catálogo Motocicletas 2016-2017Документ372 страницыNGK NTK Catálogo Motocicletas 2016-2017ysmael romeroОценок пока нет
- Systems in Mechanical Engg Multiple Choice Questions: Unit - 3 1. 2. 3. 4Документ5 страницSystems in Mechanical Engg Multiple Choice Questions: Unit - 3 1. 2. 3. 4Mahesh DhopeОценок пока нет