Вам также может понравиться
- Robot Manipulators: Modeling, Performance Analysis and ControlОт EverandRobot Manipulators: Modeling, Performance Analysis and ControlОценок пока нет
- Robot Dynamics: 1 DefinitionДокумент6 страницRobot Dynamics: 1 Definitionalagar krishna kumarОценок пока нет
- Dynamics of Serial Multibody Systems Using The Decoupled Natural Orthogonal Complement MatricesДокумент11 страницDynamics of Serial Multibody Systems Using The Decoupled Natural Orthogonal Complement MatricesNaresh Kumar ReddyОценок пока нет
- Velocity and Position Control of A Wheel 2 PDFДокумент9 страницVelocity and Position Control of A Wheel 2 PDFdannyabeОценок пока нет
- Forward Kinematics - Inverse Kinematics and DynamicsДокумент13 страницForward Kinematics - Inverse Kinematics and DynamicsBehind SilhouetteОценок пока нет
- Chapter4 DynamicAnalysisДокумент14 страницChapter4 DynamicAnalysismulerОценок пока нет
- Torque Reduction For 2 Dof ManipulatorДокумент5 страницTorque Reduction For 2 Dof ManipulatorAnkit GoratelaОценок пока нет
- Motion Generation Tumbling Robot Using A General Contact ModelДокумент6 страницMotion Generation Tumbling Robot Using A General Contact ModelPaulo Roberto Chiarolanza VilelaОценок пока нет
- Chapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversДокумент43 страницыChapter 8 Practical Introduction To Rigid Body Linear Complementary Problem (LCP) Constraint SolversjohnsmithiОценок пока нет
- D'Alembert-Lagrange!s Principal Equations, Their Origin and ApplicationsДокумент45 страницD'Alembert-Lagrange!s Principal Equations, Their Origin and ApplicationsBagulSurabhiОценок пока нет
- RoboticaДокумент21 страницаRoboticabrayanОценок пока нет
- Solving Kinematics Problems of A 6-DOF Robot Manipulator PDFДокумент6 страницSolving Kinematics Problems of A 6-DOF Robot Manipulator PDFjasyongОценок пока нет
- Simulation and Animation of Kinematic and Dynamic Machinery Systems With MATLABДокумент4 страницыSimulation and Animation of Kinematic and Dynamic Machinery Systems With MATLABHariharanОценок пока нет
- Inverse Kinematic Analysisof IRB120 Robot ArmДокумент8 страницInverse Kinematic Analysisof IRB120 Robot ArmBala muniyandi GОценок пока нет
- Dynamic Modeling of Robot Manipulators in D-H FramesДокумент6 страницDynamic Modeling of Robot Manipulators in D-H FramesPatricio GalarceОценок пока нет
- ECE 572 Term Project Al-Refai, Bowman, Eisenbraun: Physical PrototypeДокумент10 страницECE 572 Term Project Al-Refai, Bowman, Eisenbraun: Physical Prototypelovaco01Оценок пока нет
- SCI31331259613000Документ17 страницSCI31331259613000yemane g.michalОценок пока нет
- Symbolic Computation of Dynamics On Smooth ManifoldsДокумент16 страницSymbolic Computation of Dynamics On Smooth Manifoldssvk_ntОценок пока нет
- Aeletters 2023 8 2 2Документ8 страницAeletters 2023 8 2 2miskoscribdОценок пока нет
- A Multisteering Trailer System Conversion Into Chained Form Using Dynamic FeedbackДокумент12 страницA Multisteering Trailer System Conversion Into Chained Form Using Dynamic FeedbackpkmondalbandrОценок пока нет
- Kinmatics Invese CalcuДокумент6 страницKinmatics Invese CalcukinfegetaОценок пока нет
- tmpDF31 TMPДокумент15 страницtmpDF31 TMPFrontiersОценок пока нет
- Kinematics Modeling of Redundant ManipulatorДокумент7 страницKinematics Modeling of Redundant ManipulatorHung Nguyen-CongОценок пока нет
- Dynamic Parallel Khalil Ouarda JINT 07 PDFДокумент24 страницыDynamic Parallel Khalil Ouarda JINT 07 PDFQuang BáchОценок пока нет
- Small Signal Staibili Studies On Wetsern Region NetworkДокумент10 страницSmall Signal Staibili Studies On Wetsern Region NetworkSaugato MondalОценок пока нет
- Robotic MatlabДокумент3 страницыRobotic MatlabBala muniyandi GОценок пока нет
- Robot Kinematics: Robot Kinematics Applies Geometry To The Study of The MovementДокумент3 страницыRobot Kinematics: Robot Kinematics Applies Geometry To The Study of The MovementKrishanu ModakОценок пока нет
- Solution of Inverse Kinematics For SCARA Manipulator Using Adaptive Neuro-Fuzzy NetworkДокумент8 страницSolution of Inverse Kinematics For SCARA Manipulator Using Adaptive Neuro-Fuzzy NetworkijscОценок пока нет
- Tme 11303 CHP1Документ26 страницTme 11303 CHP1Tuisyen Al FatehОценок пока нет
- The Inverse Kinematics Solution, Closed-Form Dynamics and Simulation of Adeptone Industrial RobotДокумент6 страницThe Inverse Kinematics Solution, Closed-Form Dynamics and Simulation of Adeptone Industrial RobotLabo DolonОценок пока нет
- K.G.S. DarshanaДокумент3 страницыK.G.S. DarshanaSaransh JainОценок пока нет
- Design of A 3 Dof Robotic Arm: August 2016Документ6 страницDesign of A 3 Dof Robotic Arm: August 2016Naeem MalikОценок пока нет
- Performance Analysis of An Inverted Pendulum System With Robust ControlДокумент7 страницPerformance Analysis of An Inverted Pendulum System With Robust ControlDr Saba TareqОценок пока нет
- Forward An Inverse Kinematic of Some RobotsДокумент6 страницForward An Inverse Kinematic of Some RobotsVer TexОценок пока нет
- General Solution For The Dynamic Modeling of Parallel RobotsДокумент17 страницGeneral Solution For The Dynamic Modeling of Parallel RobotsHuynh TLoiОценок пока нет
- Dynamic Modelling of Differential-Drive Mobile RobotsДокумент7 страницDynamic Modelling of Differential-Drive Mobile RobotsMichael Mays100% (1)
- Author Guidelines QuestДокумент14 страницAuthor Guidelines QuestpcmsathishkumarОценок пока нет
- Literature Review On Inverse KinamaticДокумент6 страницLiterature Review On Inverse KinamaticFirdaus AzlanОценок пока нет
- Trabajo VibracionesДокумент17 страницTrabajo VibracionesCesar BautistaОценок пока нет
- Modeling Simulation and Position ControlДокумент10 страницModeling Simulation and Position Controlinesboumaiza293Оценок пока нет
- Integrated Flight Mechanics and Aeroelastic Aircraft Modeling Using Object-Oriented Modeling TechniquesДокумент11 страницIntegrated Flight Mechanics and Aeroelastic Aircraft Modeling Using Object-Oriented Modeling TechniquesNestramiОценок пока нет
- Adaptive Control of A Two Axis Gimbal System Using Auxiliary Error StructureДокумент5 страницAdaptive Control of A Two Axis Gimbal System Using Auxiliary Error StructurerezaОценок пока нет
- Computer Aided Analysis and Synthesis of MechanismsДокумент10 страницComputer Aided Analysis and Synthesis of MechanismsKartikeya Shukla100% (1)
- U21 Application of Newton-Euler Method For Dynamic Equations.Документ46 страницU21 Application of Newton-Euler Method For Dynamic Equations.ROBERTO GARCIA DURONОценок пока нет
- Robotics: Kinematics, Dynamics and Motion Control Module - 5 VITДокумент60 страницRobotics: Kinematics, Dynamics and Motion Control Module - 5 VITHarisankar R N R 21BRS1524Оценок пока нет
- Chapter 4Документ8 страницChapter 4marifs2002Оценок пока нет
- Dynamic Analysis of Multibody Systems Using Component ModesДокумент10 страницDynamic Analysis of Multibody Systems Using Component ModesSree Harsha Reddy JangaОценок пока нет
- Modeling of A Rack and Pinion Steering Linkage Using Multi-Body DynamicsДокумент6 страницModeling of A Rack and Pinion Steering Linkage Using Multi-Body DynamicshadiОценок пока нет
- Five Bar Planar ManipulatorДокумент7 страницFive Bar Planar Manipulatorsalberry14Оценок пока нет
- A General Approach To Multiple Precesion Point Motion Generation by 4-Bar LinkageДокумент25 страницA General Approach To Multiple Precesion Point Motion Generation by 4-Bar LinkageAbhinaba MaitraОценок пока нет
- Lecture 2 PDFДокумент8 страницLecture 2 PDFYunus qanoniОценок пока нет
- IFTOM Besanson 2007Документ7 страницIFTOM Besanson 2007LordOfSpooksОценок пока нет
- Lecture 2 Introduction To RoboticsДокумент12 страницLecture 2 Introduction To RoboticsDomjul KumzhiОценок пока нет
- Robotics Research The International Journal Of: The Calculation of Robot Dynamics Using Articulated-Body InertiasДокумент19 страницRobotics Research The International Journal Of: The Calculation of Robot Dynamics Using Articulated-Body InertiasPrakashОценок пока нет
- EOM For Structures in Terms of Quasi CoordinatesДокумент17 страницEOM For Structures in Terms of Quasi CoordinatesVitor FinottoОценок пока нет
- Study of Rotor-Bearing Systems Using Campbell DiagramДокумент4 страницыStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggОценок пока нет
- Trifocal Tensor: Exploring Depth, Motion, and Structure in Computer VisionОт EverandTrifocal Tensor: Exploring Depth, Motion, and Structure in Computer VisionОценок пока нет
- Difference Equations in Normed Spaces: Stability and OscillationsОт EverandDifference Equations in Normed Spaces: Stability and OscillationsОценок пока нет
- Overview of Solar DesalinationДокумент17 страницOverview of Solar Desalinationalagar krishna kumarОценок пока нет
- Desalination by Using Alternative EnergyДокумент20 страницDesalination by Using Alternative Energyalagar krishna kumarОценок пока нет
- Mechatronics: Pushparaj Mani PathakДокумент36 страницMechatronics: Pushparaj Mani Pathakalagar krishna kumarОценок пока нет
- Static Analysis of A 6 - Axis Industrial Robot Using Finite Element AnalysisДокумент7 страницStatic Analysis of A 6 - Axis Industrial Robot Using Finite Element Analysisalagar krishna kumarОценок пока нет
- A Vibration Analysis of A 6 Axis Industrial Robot Using Fea: SciencedirectДокумент8 страницA Vibration Analysis of A 6 Axis Industrial Robot Using Fea: Sciencedirectalagar krishna kumarОценок пока нет
- s17 PDFДокумент5 страницs17 PDFalagar krishna kumarОценок пока нет
- Sciencedirect Sciencedirect SciencedirectДокумент4 страницыSciencedirect Sciencedirect Sciencedirectalagar krishna kumarОценок пока нет
- Writing Goals and Objectives GoalsДокумент2 страницыWriting Goals and Objectives Goalsalagar krishna kumarОценок пока нет
- Intro Robot Kinematics 5Документ25 страницIntro Robot Kinematics 5Gnanesh PendliОценок пока нет
- Stress TypesДокумент1 страницаStress Typesalagar krishna kumarОценок пока нет
- Agreement Gold LoanДокумент4 страницыAgreement Gold Loanalagar krishna kumarОценок пока нет
- Unit 14 - Week 12: Assignment 12Документ5 страницUnit 14 - Week 12: Assignment 12alagar krishna kumarОценок пока нет
- Understanding Volume Kinetics: Robert G. HahnДокумент9 страницUnderstanding Volume Kinetics: Robert G. Hahnalagar krishna kumarОценок пока нет
- Fluid Mechanics Is A Branch of Science Which Deals With Fluids inДокумент6 страницFluid Mechanics Is A Branch of Science Which Deals With Fluids inalagar krishna kumarОценок пока нет
- Life QuotesДокумент2 страницыLife Quotesalagar krishna kumarОценок пока нет
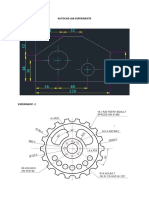
- Autocad Lab Experiments Experiment - 1Документ3 страницыAutocad Lab Experiments Experiment - 1alagar krishna kumarОценок пока нет
- EGD Diagrams1Документ3 страницыEGD Diagrams1alagar krishna kumarОценок пока нет
- For Compressible Flow:: Displacement Thickness: It Is Denoted byДокумент1 страницаFor Compressible Flow:: Displacement Thickness: It Is Denoted byalagar krishna kumarОценок пока нет
- Sintering of Powdered Copper: Brendan Short, Brendan Barrett, Jason Gamble Engineering 45, SRJC Fall 2011Документ25 страницSintering of Powdered Copper: Brendan Short, Brendan Barrett, Jason Gamble Engineering 45, SRJC Fall 2011476500Оценок пока нет
- Vedantu Neet Ug Material Part 2Документ41 страницаVedantu Neet Ug Material Part 2PrateekОценок пока нет
- Unit I-D - Defects in SolidsДокумент16 страницUnit I-D - Defects in Solidsjyoti kumariОценок пока нет
- 4th Preliminary Exam in Science 9Документ4 страницы4th Preliminary Exam in Science 9Loreyn LoridoОценок пока нет
- NanotechДокумент41 страницаNanotechOrange HuntОценок пока нет
- Bending Effect On ExhaustДокумент11 страницBending Effect On Exhaustsayantan ghoshОценок пока нет
- 1950 - Colthup - J Opt Soc Am - Spectra-Structure Correlations in The Infra-Red RegionДокумент4 страницы1950 - Colthup - J Opt Soc Am - Spectra-Structure Correlations in The Infra-Red Regionvitoribeiro90Оценок пока нет
- Andrew HJ5 50Документ3 страницыAndrew HJ5 50sfynksОценок пока нет
- NMR Logging ToolДокумент8 страницNMR Logging Toolzapspaz100% (1)
- Nota Chemistry F4 Chapter 1 FullДокумент21 страницаNota Chemistry F4 Chapter 1 Fullchot hansemОценок пока нет
- 318 Sample-Chapter PDFДокумент70 страниц318 Sample-Chapter PDFjuanОценок пока нет
- Cambridge RadioactiveДокумент23 страницыCambridge RadioactiveArianna RodriguezОценок пока нет
- P H y S I C S Part - I Multiple Correct Answer(s) TypeДокумент28 страницP H y S I C S Part - I Multiple Correct Answer(s) TypeUdayОценок пока нет
- Module 13 - Differential Equations 3 (Self Study)Документ4 страницыModule 13 - Differential Equations 3 (Self Study)api-3827096Оценок пока нет
- 2 2 - Naming Ionic Molecular CompoundsДокумент31 страница2 2 - Naming Ionic Molecular Compoundsapi-263048875100% (1)
- Channel Lining and Pier Scour Design ManualДокумент53 страницыChannel Lining and Pier Scour Design ManualAdeRatihIspandiariОценок пока нет
- Heat Transfer Solved Examples - AskIITiansДокумент6 страницHeat Transfer Solved Examples - AskIITiansthiripura sundariОценок пока нет
- Advances in Inorganic Chemistry and Radiochemistry 06 1964 PDFДокумент529 страницAdvances in Inorganic Chemistry and Radiochemistry 06 1964 PDFAlexandra GorduОценок пока нет
- Work Power EnergyДокумент7 страницWork Power EnergytttomtiaОценок пока нет
- Refractive Index of Liquids PDFДокумент7 страницRefractive Index of Liquids PDFDevang TRIVEDIОценок пока нет
- Advanced Topics in Quantum Field Theory A Lecture Course by Shifman M.Документ642 страницыAdvanced Topics in Quantum Field Theory A Lecture Course by Shifman M.Amos chenОценок пока нет
- Speed of Light Sample Problems: PROBLEM: Find The Frequency of An EM Wave With A Wavelength of 485.2 Nm. SolutionДокумент1 страницаSpeed of Light Sample Problems: PROBLEM: Find The Frequency of An EM Wave With A Wavelength of 485.2 Nm. SolutionRenz Benhar Ocon BobadillaОценок пока нет
- Soalan Kbat Add Math Form 5Документ8 страницSoalan Kbat Add Math Form 5Eric Mooi50% (2)
- Mechanical APDL Material ReferenceДокумент6 страницMechanical APDL Material ReferenceSlim SalimОценок пока нет
- Short Notes 1 To 22 Formulas and Numerical QuestionsДокумент48 страницShort Notes 1 To 22 Formulas and Numerical QuestionshelloОценок пока нет
- What Nuclear Physics Is All About - ICT-WikiДокумент5 страницWhat Nuclear Physics Is All About - ICT-WikiSaisamckОценок пока нет
- Chapter 21 Sound Wave REVISIONДокумент4 страницыChapter 21 Sound Wave REVISIONYilea1111111Оценок пока нет
- A LEVEL Organic ChemДокумент110 страницA LEVEL Organic ChemGan SinliОценок пока нет
- What Are AminesДокумент16 страницWhat Are AminesKristine Faye LeybagОценок пока нет