Вам также может понравиться
- Introduccion A Los Sistemas OperativosДокумент8 страницIntroduccion A Los Sistemas OperativosJorge GutierrezОценок пока нет
- Sistema Operativo Aguilar PNPДокумент27 страницSistema Operativo Aguilar PNPMaria Elena Pisco NuñezОценок пока нет
- LAAGДокумент26 страницLAAGAvilaОценок пока нет
- Lectura 1 Sistemas OperativosДокумент8 страницLectura 1 Sistemas OperativosJuana Triana del AngelОценок пока нет
- Lab Sistemas OperativosДокумент13 страницLab Sistemas OperativosEliana AcevedoОценок пока нет
- Sistemas Operativos2Документ38 страницSistemas Operativos2Jose MederoОценок пока нет
- NOCIONES SOBRE SISTEMAS OPERATIVOS-1er AñoДокумент2 страницыNOCIONES SOBRE SISTEMAS OPERATIVOS-1er AñoAngel Benicio MontielОценок пока нет
- 1.2 Sistemas OperativosДокумент3 страницы1.2 Sistemas OperativosGema RamírezОценок пока нет
- Software y HardwareДокумент26 страницSoftware y HardwaretazmilloОценок пока нет
- 1.2 Sistema OperativoДокумент9 страниц1.2 Sistema Operativobrayan maciasОценок пока нет
- Sistemas OperativosДокумент8 страницSistemas OperativosAlejandra GutierrezОценок пока нет
- Libro Unidad UnoДокумент37 страницLibro Unidad UnoStephanie ChavezОценок пока нет
- Funciones Del Sistema OperativoДокумент4 страницыFunciones Del Sistema OperativoDaibeth Pinto ArrietaОценок пока нет
- Principios Básicos de Los Sistemas OperativosДокумент3 страницыPrincipios Básicos de Los Sistemas OperativosmathhyОценок пока нет
- 4° - Lab - Sistemas Operativos - Tecpr-1Документ16 страниц4° - Lab - Sistemas Operativos - Tecpr-1MateoОценок пока нет
- Sistema OperativoДокумент2 страницыSistema Operativocjsanchez24Оценок пока нет
- Tarea Que Realiza Un Sistema OperativoДокумент3 страницыTarea Que Realiza Un Sistema OperativoAron SanchezОценок пока нет
- Sistemas OperativosДокумент10 страницSistemas OperativosBetsaida Cruz LauraОценок пока нет
- Que Hace A Un Sistema Operativo Un Programa EspecialДокумент2 страницыQue Hace A Un Sistema Operativo Un Programa EspecialARI DLCM100% (4)
- 1.1 Definición y ConceptoДокумент5 страниц1.1 Definición y ConceptoAaron PelayoОценок пока нет
- Definiciones SO 1 MODIFДокумент15 страницDefiniciones SO 1 MODIFSantiago OrozcoОценок пока нет
- Tema 2Документ18 страницTema 2jsmglruizreyesОценок пока нет
- Implantación de Sistemas OperativosДокумент22 страницыImplantación de Sistemas OperativosBorja Rey SeoaneОценок пока нет
- Sistemas OperativosДокумент8 страницSistemas Operativossan.nc1Оценок пока нет
- Fundamentos de So Version 3Документ91 страницаFundamentos de So Version 3GrupozotaОценок пока нет
- Sistemas Operativos-Windows - PARTE1Документ88 страницSistemas Operativos-Windows - PARTE1Jesus EspejoОценок пока нет
- Paq. Cont. y - Trib. 1er. Año BGUДокумент28 страницPaq. Cont. y - Trib. 1er. Año BGUJessica MezaОценок пока нет
- Sistemas OperativosДокумент35 страницSistemas OperativosSonia OkomoОценок пока нет
- Sistemas OperativosДокумент52 страницыSistemas OperativosFernando Moreira ToscaniОценок пока нет
- Sistemas OperativosДокумент14 страницSistemas OperativosMaikol GuzmanОценок пока нет
- Sistemas Operativos y TraductoresДокумент5 страницSistemas Operativos y TraductoresrudavalosОценок пока нет
- 15 Sistemas OperativosДокумент90 страниц15 Sistemas OperativosulisesОценок пока нет
- 1erosistemaoperat 202122noviembreДокумент34 страницы1erosistemaoperat 202122noviembreKevin ChalenОценок пока нет
- Sistemas Operativos ISCДокумент232 страницыSistemas Operativos ISCErika Garcia SantiagoОценок пока нет
- Guerrero Veronica Unidad 1. Actividad 1. Funciones Del Sistema Operativo.Документ5 страницGuerrero Veronica Unidad 1. Actividad 1. Funciones Del Sistema Operativo.Evelin Lopez GermanОценок пока нет
- Arquitectura OrganizacionalДокумент8 страницArquitectura OrganizacionalQuentin UstОценок пока нет
- Sistema OperáticoДокумент233 страницыSistema OperáticoAdam AndersonОценок пока нет
- Tema I Definicion de Sistemas OperativosДокумент8 страницTema I Definicion de Sistemas OperativosByron TerceroОценок пока нет
- Sistema Operativo 111Документ9 страницSistema Operativo 111Jose Luis HernandezОценок пока нет
- Principios SOFTWAREДокумент7 страницPrincipios SOFTWAREdavmed30Оценок пока нет
- Exposicion Sistemas OperativosДокумент22 страницыExposicion Sistemas OperativosKaren Montaño ArceoОценок пока нет
- UNIDAD I Sistemas OperativosДокумент21 страницаUNIDAD I Sistemas Operativospilar alonzoОценок пока нет
- Funciones y Características de Los Sistemas OperativosДокумент2 страницыFunciones y Características de Los Sistemas OperativosPaulina Alejandra Cutiño de la CruzОценок пока нет
- DiapoДокумент89 страницDiapoMarlon OrtizОценок пока нет
- Practica1 Luis Alvarado VelascoДокумент21 страницаPractica1 Luis Alvarado VelascoLuis EloyОценок пока нет
- Tema6 - Introducción A Los Sistemas OperativosДокумент39 страницTema6 - Introducción A Los Sistemas OperativosJuanlu RastrolloОценок пока нет
- Unidad 1. Actividad1Документ6 страницUnidad 1. Actividad1Ulises AlcantaraОценок пока нет
- Sistema OperativoДокумент6 страницSistema Operativovengatureyno2022Оценок пока нет
- Corelli Um 1Документ19 страницCorelli Um 1Kevin EspejoОценок пока нет
- Trabajo FinalДокумент15 страницTrabajo Finaljhonson felixОценок пока нет
- Guia de Sistemas Operativos 3 Er Corte Segundo 20%Документ12 страницGuia de Sistemas Operativos 3 Er Corte Segundo 20%Moises GonzalezОценок пока нет
- Actividad 1 - AntologíaДокумент19 страницActividad 1 - AntologíaHoracio MontoyaОценок пока нет
- UNIDAD 1 Introducción A La Computación y Hoja de CálculoДокумент3 страницыUNIDAD 1 Introducción A La Computación y Hoja de CálculoinggafabifiОценок пока нет
- Actividad 1Документ16 страницActividad 1Yimy Alejandro CRISTANCHO ARIASОценок пока нет
- Sistemasoperativos 160119144918Документ18 страницSistemasoperativos 160119144918Gustavo DiazОценок пока нет
- Práctico 1Документ3 страницыPráctico 1Paula Quiroga100% (1)
- ComputadorasДокумент9 страницComputadorasJohanna GuédezОценок пока нет
- Clase #1-U1 Arquitectura de Computadores - SSOOДокумент37 страницClase #1-U1 Arquitectura de Computadores - SSOOJoseth BenavidesОценок пока нет
- Desarrollo de componentes software para el manejo de dispositivos. IFCT0609От EverandDesarrollo de componentes software para el manejo de dispositivos. IFCT0609Оценок пока нет
- Desarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609От EverandDesarrollo y optimización de componentes software para tareas administrativas de sistemas. IFCT0609Оценок пока нет
- Cardinal Display 180Документ29 страницCardinal Display 180HARP BLUESОценок пока нет
- Ejercicios Fisica Digital SearsДокумент3 страницыEjercicios Fisica Digital SearsEmilio Coaquira ChambiОценок пока нет
- Reporte de Preguntas - Por Qué Tangente Delta - Factor de Potencia en Interruptores de Media y Alta TensiónДокумент27 страницReporte de Preguntas - Por Qué Tangente Delta - Factor de Potencia en Interruptores de Media y Alta TensiónVerónica100% (1)
- Conexionado Db9Документ4 страницыConexionado Db9ender919Оценок пока нет
- 02.-VRV Puesta en Marcha y Ajuste de Obra - 40 - 0KДокумент68 страниц02.-VRV Puesta en Marcha y Ajuste de Obra - 40 - 0KJose Ignacio Mora CárdenasОценок пока нет
- Tema 01 - Arquitectura Del Sistema V-SatДокумент41 страницаTema 01 - Arquitectura Del Sistema V-SatGerson Alexis Quispe RomeroОценок пока нет
- Expediente Paneles Tournavista 25 05 2012Документ96 страницExpediente Paneles Tournavista 25 05 2012Jazz Solis Cardenas100% (1)
- Revisión Y Aplicaciones de Las Tecnologías de La Maquinas Síncronas VirtualesДокумент3 страницыRevisión Y Aplicaciones de Las Tecnologías de La Maquinas Síncronas VirtualesFelix Adrian “Monsting” Trujillo PerdomoОценок пока нет
- Cedula de Detalle Punto 1.1.y 1.2Документ93 страницыCedula de Detalle Punto 1.1.y 1.2maldonados.zoraОценок пока нет
- Tenologia 5G NR 1599678911640Документ44 страницыTenologia 5G NR 1599678911640Orlando FernándezОценок пока нет
- 1introduccion 2Документ19 страниц1introduccion 2Bryan Garcia TiconaОценок пока нет
- Cuadro Automático Con Microprocesador para Grupo Electrogeno de EmergenciaДокумент34 страницыCuadro Automático Con Microprocesador para Grupo Electrogeno de EmergenciaHector Cabrera100% (1)
- Oscilador de CristalДокумент2 страницыOscilador de Cristaljisse_gualan100% (1)
- 1.2.-CONCEPTOS Basicos de RedesДокумент26 страниц1.2.-CONCEPTOS Basicos de RedesReyna GutierrezОценок пока нет
- Instalaciones Electricas Residenciales Con Autocad: Curso VirtualДокумент20 страницInstalaciones Electricas Residenciales Con Autocad: Curso VirtualArturo CasasОценок пока нет
- Informe 11 - Instrumentación Industrial - Metodos de Medición de Variables No ElectricasДокумент5 страницInforme 11 - Instrumentación Industrial - Metodos de Medición de Variables No ElectricasJesus OrtizОценок пока нет
- Actividad 2Документ4 страницыActividad 2Edwin CorredorОценок пока нет
- T-Con en Televisores LCDДокумент9 страницT-Con en Televisores LCDShery Cuellar100% (1)
- UNIDAD1 Digitalizacion y Reconstruccion UPC Parte3Документ27 страницUNIDAD1 Digitalizacion y Reconstruccion UPC Parte3Anderson AbelОценок пока нет
- Temporizador ElectroneumáticoДокумент5 страницTemporizador ElectroneumáticoGeral'd FSОценок пока нет
- Manual de Cargadores SCRFLXDEC200 ActualizadoДокумент55 страницManual de Cargadores SCRFLXDEC200 Actualizadoeder contreras100% (1)
- Manual DDJ-WeGO EsДокумент21 страницаManual DDJ-WeGO EsAntonio moya fraile0% (1)
- Ordinario DispositivosДокумент30 страницOrdinario DispositivosCanal EmpíricoОценок пока нет
- Laboratorio N 4Документ13 страницLaboratorio N 4Freddy Julio Montalvan GironОценок пока нет
- FISICA-PRE U-VER22-11 ELECTROMAGNETISMO ClavesДокумент4 страницыFISICA-PRE U-VER22-11 ELECTROMAGNETISMO ClavesCristopher PeraltaОценок пока нет
- Efectos de La Aplicación de Variadores de Frecuencia en Los Procesos Productivos de La Planta de Alimentos Quicornac S. A. en La Ciudad de VincesДокумент37 страницEfectos de La Aplicación de Variadores de Frecuencia en Los Procesos Productivos de La Planta de Alimentos Quicornac S. A. en La Ciudad de Vincesacevallos_utbОценок пока нет
- Piano ElectrònicoДокумент23 страницыPiano ElectrònicoAngell ReyesОценок пока нет
- Baja Manual Ut4200Документ49 страницBaja Manual Ut4200Jeison FarfanОценок пока нет
- Instalaciones Elc3a9ctricas Domc3a9sticasДокумент25 страницInstalaciones Elc3a9ctricas Domc3a9sticasJorge Marres NavarroОценок пока нет
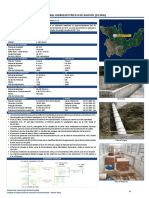
- Central Hidroeléctrica 8 de Agosto (19 MW) : Empresa Concesionaria DescripciónДокумент1 страницаCentral Hidroeléctrica 8 de Agosto (19 MW) : Empresa Concesionaria DescripciónJose Cholán ArribasplataОценок пока нет