Вам также может понравиться
- Modern Electrical Installation for Craft StudentsОт EverandModern Electrical Installation for Craft StudentsРейтинг: 4.5 из 5 звезд4.5/5 (4)
- Simulation of Single Phase Full Bridge Converter Using LTspiceДокумент9 страницSimulation of Single Phase Full Bridge Converter Using LTspicegoten10daОценок пока нет
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceДокумент10 страниц2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- Circuit Diagram For Load Test On DC Shunt Motor: Three Phase Auto Transformer MДокумент4 страницыCircuit Diagram For Load Test On DC Shunt Motor: Three Phase Auto Transformer MBalaji SОценок пока нет
- Practical TransformerДокумент9 страницPractical TransformerBT21EE017 Gulshan RajОценок пока нет
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2От EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Оценок пока нет
- DC MachinesДокумент20 страницDC MachinesRaeniel SoritaОценок пока нет
- Open Circuit Characteristics of DC Shunt GeneratorДокумент6 страницOpen Circuit Characteristics of DC Shunt GeneratorBalagam RupaОценок пока нет
- Lec # 2.5 Transformer Phasor DiagramДокумент12 страницLec # 2.5 Transformer Phasor DiagramSyed Sajjad AliОценок пока нет
- EEE255 Manual Part2Документ5 страницEEE255 Manual Part2Betül MalkoçОценок пока нет
- Stator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorДокумент6 страницStator and Rotor Currents Analysis Of: The Inverted Rotor Induction MotorChenaker HamzaОценок пока нет
- An-Najah University: Electrical Circuits LabДокумент7 страницAn-Najah University: Electrical Circuits LabAdel AtawiОценок пока нет
- 001 Emf MMF ZPF Load Test-2Документ10 страниц001 Emf MMF ZPF Load Test-2CheetahprakashОценок пока нет
- ECE2120 Electrical Engineering Laboratory II Lab 4: Inductors and Series RL CircuitsДокумент8 страницECE2120 Electrical Engineering Laboratory II Lab 4: Inductors and Series RL CircuitsMuhammad AzeemОценок пока нет
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperДокумент5 страницHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggОценок пока нет
- Faculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursДокумент6 страницFaculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursŸØüsap BasiliОценок пока нет
- L-4 (DK) (Pe) ( (Ee) Nptel) 4Документ5 страницL-4 (DK) (Pe) ( (Ee) Nptel) 4GagneОценок пока нет
- Electrical Machine K-NotesДокумент38 страницElectrical Machine K-NotesAkashGauravОценок пока нет
- EEE Lect7 ShareДокумент15 страницEEE Lect7 ShareROMIT RUNWALОценок пока нет
- 5.AC Phase Control Using SCRДокумент8 страниц5.AC Phase Control Using SCRabcdefgОценок пока нет
- Active Transducers - TutorialspointДокумент5 страницActive Transducers - TutorialspointkalingamechОценок пока нет
- Electrical Machines Laboratory - 2Документ7 страницElectrical Machines Laboratory - 2sanjuОценок пока нет
- V, V, K U C W/L, V I, I, G, R: Unless Given SpecificallyДокумент2 страницыV, V, K U C W/L, V I, I, G, R: Unless Given SpecificallyraghavbhatiaОценок пока нет
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsДокумент15 страницLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuОценок пока нет
- Power Factor Meter: ConstructionДокумент7 страницPower Factor Meter: Constructionsahale sheraОценок пока нет
- ELEC3206 Lab 1 3-ph TransformerДокумент7 страницELEC3206 Lab 1 3-ph TransformermaxОценок пока нет
- Step Response LABДокумент6 страницStep Response LABGanesh ThapaОценок пока нет
- Torque Slip CharacteristicsДокумент24 страницыTorque Slip Characteristicsavi013Оценок пока нет
- M&I Lab ManualДокумент85 страницM&I Lab ManualGandhi Ramasamy100% (2)
- CHAP3.Arus Bolak BalikДокумент35 страницCHAP3.Arus Bolak BalikFerdinan YudaОценок пока нет
- 241 RLC Circuit Ac SourceДокумент14 страниц241 RLC Circuit Ac SourceWsma AmswОценок пока нет
- S.NO. 1 Single Phase Half Wave Rectifier With R & RL Load AimДокумент15 страницS.NO. 1 Single Phase Half Wave Rectifier With R & RL Load AimShailendra KumarОценок пока нет
- Chapter Two: Line or Naturally Commutated ConvertersДокумент32 страницыChapter Two: Line or Naturally Commutated ConvertersMichael Adu-boahenОценок пока нет
- 4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor TestsДокумент4 страницы4.circle Diagram of Three Phase Induction Motor From No Load & Blocked Rotor Testsmandadi_sailesh50% (2)
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorДокумент32 страницыCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghОценок пока нет
- Lectures 5 To 7 - Diode CircuitsДокумент14 страницLectures 5 To 7 - Diode CircuitsAniketsingh MundlothОценок пока нет
- Characteristics of DC GeneratorsДокумент8 страницCharacteristics of DC GeneratorsNdavi KiangiОценок пока нет
- Unit-Iv Testing of 3-Ø Induction MotorДокумент12 страницUnit-Iv Testing of 3-Ø Induction MotorAshok PОценок пока нет
- UntitledДокумент27 страницUntitledDaniel SetiawanОценок пока нет
- Equivalent Circuit of A Single Phase Transformer: N N I I V VДокумент4 страницыEquivalent Circuit of A Single Phase Transformer: N N I I V Vnaveen5247Оценок пока нет
- Polyphase Induction Machines: Principle of OperationДокумент10 страницPolyphase Induction Machines: Principle of OperationPrakash KumarОценок пока нет
- Report Lab 7Документ4 страницыReport Lab 7DUY VÕ BẢOОценок пока нет
- Open&&short Circuit TestДокумент8 страницOpen&&short Circuit Testمعتصم الكاملОценок пока нет
- Single Conductor DC Generator and Motor OperationsДокумент6 страницSingle Conductor DC Generator and Motor OperationsBT21EE017 Gulshan RajОценок пока нет
- 1.15.crystal Diode As A Rectifier:: Is Zero. Both The Load Voltage and Current Are of Are Shown in Figure 1.29Документ10 страниц1.15.crystal Diode As A Rectifier:: Is Zero. Both The Load Voltage and Current Are of Are Shown in Figure 1.29Robert EvansОценок пока нет
- IM Phasor Diagram, NO Load and Blocked Rotor Test and Torque Slip CharacteristicДокумент19 страницIM Phasor Diagram, NO Load and Blocked Rotor Test and Torque Slip CharacteristicDEBADATTAОценок пока нет
- 382 Lecture 15Документ14 страниц382 Lecture 15Faizan AhmadОценок пока нет
- Dynamic Modeling of PMSMДокумент10 страницDynamic Modeling of PMSMHisham Magdi El DeebОценок пока нет
- Eee Lab Report 8Документ9 страницEee Lab Report 8Sayeed MohammedОценок пока нет
- Aust/Eee: Ahsanullah University of Science and TechnologyДокумент45 страницAust/Eee: Ahsanullah University of Science and TechnologySudipto Sarker SuptoОценок пока нет
- Three Phase Induction RegulatorДокумент5 страницThree Phase Induction RegulatormohamedmohebОценок пока нет
- DC GeneratorsДокумент35 страницDC Generatorssayed Tamir janОценок пока нет
- CHAP3.Arus Bolak BalikДокумент35 страницCHAP3.Arus Bolak BalikOmi Luthfia RahmanОценок пока нет
- Circuit Analysis With Laplace Transform (Week 6) PDFДокумент7 страницCircuit Analysis With Laplace Transform (Week 6) PDFmaaz ansariОценок пока нет
- 10-Waveform Generator Using OpAmpДокумент4 страницы10-Waveform Generator Using OpAmpAquariusОценок пока нет
- 6.002 Midterm2 F18Документ19 страниц6.002 Midterm2 F18VD CommentОценок пока нет
- TodorovBojilov enДокумент8 страницTodorovBojilov enRyan PambudiОценок пока нет
- JAM 2015: General Instructions During ExaminationДокумент19 страницJAM 2015: General Instructions During ExaminationAnimesh PariharОценок пока нет
- CV of Great PDFДокумент3 страницыCV of Great PDFAnimesh PariharОценок пока нет
- Chapter01 PDFДокумент40 страницChapter01 PDFAnimesh PariharОценок пока нет
- MIT6 041F10 Tut01 Sol PDFДокумент3 страницыMIT6 041F10 Tut01 Sol PDFAnimesh PariharОценок пока нет
- Then, It Is Proved That There Exists at Least One Point in The Trail Where Sanjeev Was Present at Exactly The Same Time On Both Saturday and SundayДокумент3 страницыThen, It Is Proved That There Exists at Least One Point in The Trail Where Sanjeev Was Present at Exactly The Same Time On Both Saturday and SundayAnimesh PariharОценок пока нет
- Stator, Rotor and Net FieldsДокумент5 страницStator, Rotor and Net FieldsAnimesh PariharОценок пока нет
- Starting, Speed Control - Braking of 3-Phase Induction MotorДокумент18 страницStarting, Speed Control - Braking of 3-Phase Induction MotorAnimesh Parihar100% (1)
- Single Phase Induction MotorДокумент19 страницSingle Phase Induction MotorAnimesh Parihar100% (1)
- Three Phase WindingДокумент7 страницThree Phase WindingAnimesh PariharОценок пока нет
- Generator - Motor OperationsДокумент5 страницGenerator - Motor OperationsAnimesh PariharОценок пока нет
- Pout Vs NR GeneratorДокумент1 страницаPout Vs NR GeneratorAnimesh PariharОценок пока нет
- Chettinad Cement Corporation LTD: Mahendra Kumar ShuklaДокумент1 страницаChettinad Cement Corporation LTD: Mahendra Kumar ShuklaAnimesh PariharОценок пока нет
- SyllabusДокумент1 страницаSyllabusAnimesh PariharОценок пока нет
- How To 999986jugkДокумент1 страницаHow To 999986jugkAnimesh PariharОценок пока нет
- Atomic Structure MCQ W AnsДокумент6 страницAtomic Structure MCQ W AnsHovan Tall Nut TanОценок пока нет
- Revision Worksheet Numericals SA2Документ2 страницыRevision Worksheet Numericals SA2Chinmaya NagpalОценок пока нет
- Is 10028 3 1981 PDFДокумент27 страницIs 10028 3 1981 PDFManoj MishraОценок пока нет
- HS POLYBAG - NEW FACTORY ELECTRICAL SYSTEM 견적서 20190713 (최종)Документ11 страницHS POLYBAG - NEW FACTORY ELECTRICAL SYSTEM 견적서 20190713 (최종)Nhí LêОценок пока нет
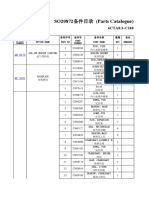
- 6CTA8.3-C240 FRO CLG862 40c0273en Parts CatalogueДокумент80 страниц6CTA8.3-C240 FRO CLG862 40c0273en Parts CataloguePurnama AbhieОценок пока нет
- DTK-120HW, DTK-MRJ11, DTK-2LVLP: Surge ProtectorsДокумент1 страницаDTK-120HW, DTK-MRJ11, DTK-2LVLP: Surge Protectorsethan8888Оценок пока нет
- Advance Electrical Machine LabДокумент2 страницыAdvance Electrical Machine LabKhan YousafzaiОценок пока нет
- PRD 104 Archivo Ingeteam Inc Wind Catalogue May 2013 Low ResДокумент32 страницыPRD 104 Archivo Ingeteam Inc Wind Catalogue May 2013 Low ResAII2013Оценок пока нет
- Internship Report WaterДокумент54 страницыInternship Report WaterEphrem Gizachew100% (1)
- Easygen 1000 SeriesДокумент4 страницыEasygen 1000 SeriesLahir Untuk MenangОценок пока нет
- Lanchshire BoilerДокумент13 страницLanchshire Boilerkarthik2468Оценок пока нет
- PipeFlowModelLibraryManual PDFДокумент132 страницыPipeFlowModelLibraryManual PDFalspeer1905100% (1)
- 3 CombustionДокумент30 страниц3 CombustionCllyan ReyesОценок пока нет
- Model Answer Lecture 02 PDFДокумент5 страницModel Answer Lecture 02 PDFAkol MajookОценок пока нет
- Tugas Ii ThermodinamicsДокумент7 страницTugas Ii ThermodinamicsAdi Dangan MuktiОценок пока нет
- LM741Документ7 страницLM741vila mathanki100% (1)
- Energy Engg.-Lab ManualДокумент51 страницаEnergy Engg.-Lab ManualManish JhadhavОценок пока нет
- TR ProtectionДокумент23 страницыTR Protectionhafiz_hazreenОценок пока нет
- Space For Electrical and Machanical Services in BuildingsДокумент31 страницаSpace For Electrical and Machanical Services in BuildingsAkshat Dev Singh100% (1)
- Qatar: Business OpportunitiesДокумент18 страницQatar: Business OpportunitiessanОценок пока нет
- Technical Report 1 1999Документ34 страницыTechnical Report 1 1999Sinan YıldızОценок пока нет
- G5 Low Profile Unit Cooler Ver 2.0Документ10 страницG5 Low Profile Unit Cooler Ver 2.0Wawan NuryanaОценок пока нет
- COMPRO Bintang AuroraДокумент26 страницCOMPRO Bintang AurorabintangОценок пока нет
- Residential KitchenBathrooДокумент7 страницResidential KitchenBathrooCarlos Daniel Ayala GonzalezОценок пока нет
- Model For Mechanical EngineeringДокумент121 страницаModel For Mechanical EngineeringAbimael wendimuОценок пока нет
- BlakeДокумент19 страницBlakeDeanneLaylayОценок пока нет
- Republic v. Pilipinas Shell, GR 173918Документ10 страницRepublic v. Pilipinas Shell, GR 173918Glenn FortesОценок пока нет
- Manuel Manto 785C InglesДокумент104 страницыManuel Manto 785C Inglesciprian quispe challco100% (1)
- Low Carbon Lining For Tunnelling Precast Segment - How Dramix® Fibre Reinforced Concrete Could Facilitate This AchievementДокумент8 страницLow Carbon Lining For Tunnelling Precast Segment - How Dramix® Fibre Reinforced Concrete Could Facilitate This AchievementDeyuan GuoОценок пока нет
- Discussions: 1. Calculate The Heat Loss and Efficiency For Both Co-Current and Counter Current Processes. Heat Loss, QДокумент7 страницDiscussions: 1. Calculate The Heat Loss and Efficiency For Both Co-Current and Counter Current Processes. Heat Loss, Qrei ayanamiОценок пока нет