Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5782)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- COSTECH Accelration of Innovation ImbejuДокумент42 страницыCOSTECH Accelration of Innovation Imbejuhamidumajid033Оценок пока нет
- Antacid Booklet Final Sept 2015Документ49 страницAntacid Booklet Final Sept 2015MarianelaMolocheОценок пока нет
- Speech To Third Form English.Документ1 страницаSpeech To Third Form English.maxОценок пока нет
- Section 4 QuizДокумент2 страницыSection 4 QuizRizki Rian AnugrahaniОценок пока нет
- 3 Strategic CapabilitiesДокумент20 страниц3 Strategic CapabilitiesMariyam HamdhaОценок пока нет
- Oracle AcademyДокумент16 страницOracle AcademyCristina - Elena CiortОценок пока нет
- OccurenceReport UPI6208Документ47 страницOccurenceReport UPI6208danialomidvar100% (1)
- ISO 14001 - 2015 Audit Checklist - SafetyCultureДокумент15 страницISO 14001 - 2015 Audit Checklist - SafetyCultureSanjeev VermaОценок пока нет
- Evaluation of Completeness of Mother and Child Protection (MCP) Card in Bishnupur District, ManipurДокумент5 страницEvaluation of Completeness of Mother and Child Protection (MCP) Card in Bishnupur District, ManipurInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- 3.factors and Techniques Influencing Peri-Implant Papillae - PDFДокумент12 страниц3.factors and Techniques Influencing Peri-Implant Papillae - PDFMargarita María Blanco LópezОценок пока нет
- Environment - Parallel Session - Jo Rowena GarciaДокумент26 страницEnvironment - Parallel Session - Jo Rowena GarciaAsian Development Bank ConferencesОценок пока нет
- Introductory Algebra 12th Edition Bittinger Test BankДокумент26 страницIntroductory Algebra 12th Edition Bittinger Test BankStephanieMckayeqwr100% (57)
- Database Design Term Project 1Документ3 страницыDatabase Design Term Project 1MuskanОценок пока нет
- Relative ClausesДокумент7 страницRelative ClausesEvaluna MoidalОценок пока нет
- Multimodal Advocacy Campaign: Clarity of Videos and SoundsДокумент3 страницыMultimodal Advocacy Campaign: Clarity of Videos and SoundsSwin EscobarОценок пока нет
- Tipe Tubuh (Somatotype) Dengan Sindrom Metabolik Pada Wanita Dewasa Non-Obesitas Usia 25-40 TahunДокумент9 страницTipe Tubuh (Somatotype) Dengan Sindrom Metabolik Pada Wanita Dewasa Non-Obesitas Usia 25-40 TahunJessica Ester ExaudiaОценок пока нет
- European Summary Report On CHP Support SchemesДокумент33 страницыEuropean Summary Report On CHP Support SchemesioanitescumihaiОценок пока нет
- Caldikind Suspension Buy Bottle of 200 ML Oral Suspension at Best Price in India 1mgДокумент1 страницаCaldikind Suspension Buy Bottle of 200 ML Oral Suspension at Best Price in India 1mgTeenaa DubashОценок пока нет
- List of Computer Science Impact Factor Journals: Indexed in ISI Web of Knowledge 2015Документ7 страницList of Computer Science Impact Factor Journals: Indexed in ISI Web of Knowledge 2015ppghoshinОценок пока нет
- Pending 1667646640 ForeclosureSimulationДокумент2 страницыPending 1667646640 ForeclosureSimulationpramod roy0% (1)
- Telemecanique: Altivar 11Документ29 страницTelemecanique: Altivar 11Ferenc MolnárОценок пока нет
- T O E F L: Kaplan Analysis of Placement TestДокумент1 страницаT O E F L: Kaplan Analysis of Placement TestSharon DanielОценок пока нет
- Simulink®Simulink Control Design User's GuideДокумент1 352 страницыSimulink®Simulink Control Design User's GuideTe PekaОценок пока нет
- Contact DetailsДокумент2 страницыContact DetailsSunil KumarОценок пока нет
- TOJan Feb 16Документ40 страницTOJan Feb 16kumararajОценок пока нет
- Thomas McPherson Brown MD Treatment of Rheumatoid DiseaseДокумент29 страницThomas McPherson Brown MD Treatment of Rheumatoid DiseaseLidia Lidia100% (1)
- Power: Definition and TypesДокумент3 страницыPower: Definition and TypesShashi RanjanОценок пока нет
- 4aa0 7171enwДокумент22 страницы4aa0 7171enwOng Ka HuiОценок пока нет
- A Formalist Approach To Robert FrostДокумент6 страницA Formalist Approach To Robert FrostAdel75% (4)
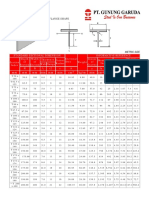
- T Beam PDFДокумент2 страницыT Beam PDFjabri kotaОценок пока нет