Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Literature Review 2500 WordsДокумент6 страницLiterature Review 2500 Wordsvvjrpsbnd100% (1)
- GRE Computer Science SyllabusДокумент2 страницыGRE Computer Science SyllabusSameer Ahmed سمیر احمدОценок пока нет
- KINDRED HEALTHCARE, INC 10-K (Annual Reports) 2009-02-25Документ329 страницKINDRED HEALTHCARE, INC 10-K (Annual Reports) 2009-02-25http://secwatch.comОценок пока нет
- Model: The Most Accepted and Respected Engine-Driven Cooler in The Gas Compression IndustryДокумент2 страницыModel: The Most Accepted and Respected Engine-Driven Cooler in The Gas Compression IndustryparathasiОценок пока нет
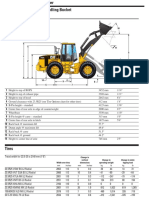
- Cat It62hДокумент4 страницыCat It62hMarceloОценок пока нет
- Transport StrikeДокумент9 страницTransport StrikeYsrael Von ArcillaОценок пока нет
- IM0973567 Orlaco EMOS Photonview Configuration EN A01 MailДокумент14 страницIM0973567 Orlaco EMOS Photonview Configuration EN A01 Maildumass27Оценок пока нет
- Lae ReservingДокумент5 страницLae ReservingEsra Gunes YildizОценок пока нет
- Lab ManualДокумент15 страницLab ManualsamyukthabaswaОценок пока нет
- Mine Gases (Part 1)Документ15 страницMine Gases (Part 1)Melford LapnawanОценок пока нет
- Zambia MTEF 2015 - 2017 (Green Paper)Документ27 страницZambia MTEF 2015 - 2017 (Green Paper)Chola MukangaОценок пока нет
- Performance Ratio Analysis Based On Energy Production For Large-Scale Solar PlantДокумент22 страницыPerformance Ratio Analysis Based On Energy Production For Large-Scale Solar PlantPrateek MalhotraОценок пока нет
- Fouzia AnjumДокумент3 страницыFouzia AnjumAbdul SyedОценок пока нет
- Title To The ProjectДокумент14 страницTitle To The ProjectJatinChadhaОценок пока нет
- BreakwatersДокумент15 страницBreakwatershima sagarОценок пока нет
- K8+ Single Chip Keyer Manual: 3 To 5 VDCДокумент8 страницK8+ Single Chip Keyer Manual: 3 To 5 VDCtito351Оценок пока нет
- Sarah Williams CVДокумент2 страницыSarah Williams CVsarahcwilliamsОценок пока нет
- PCIB Vs ESCOLIN (G.R. No. L-27860 & L-27896)Документ61 страницаPCIB Vs ESCOLIN (G.R. No. L-27860 & L-27896)strgrlОценок пока нет
- D.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Документ5 страницD.E.I Technical College, Dayalbagh Agra 5 III Semester Electrical Engg. Electrical Circuits and Measurements Question Bank Unit 1Pritam Kumar Singh100% (1)
- Sinamics gm150 sm150 Catalog d12 02 2020 enДокумент238 страницSinamics gm150 sm150 Catalog d12 02 2020 enGo andWatchОценок пока нет
- Filcar vs. EspinasДокумент2 страницыFilcar vs. EspinasBrian ThunderОценок пока нет
- User Exits in Validations SubstitutionsДокумент3 страницыUser Exits in Validations SubstitutionssandeepОценок пока нет
- Consumer Research ProcessДокумент78 страницConsumer Research ProcessShikha PrasadОценок пока нет
- Summary Studying Public Policy Michael Howlett CompleteДокумент28 страницSummary Studying Public Policy Michael Howlett CompletefadwaОценок пока нет
- Raspberry Pi Installing Noobs OSДокумент3 страницыRaspberry Pi Installing Noobs OSEXORCEОценок пока нет
- Man 3Документ38 страницMan 3Paylo KatolykОценок пока нет
- Magicolor2400 2430 2450FieldSvcДокумент262 страницыMagicolor2400 2430 2450FieldSvcKlema HanisОценок пока нет
- Telemeter-Electronic Brochure Flexible Heaters WebДокумент12 страницTelemeter-Electronic Brochure Flexible Heaters WebXavierОценок пока нет
- Deploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013Документ22 страницыDeploying MVC5 Based Provider Hosted Apps For On-Premise SharePoint 2013cilango1Оценок пока нет
- U-Blox Parameters Setting ProtocolsДокумент2 страницыU-Blox Parameters Setting Protocolspedrito perezОценок пока нет