Вам также может понравиться
- SAT Practice Book 2009 2010Документ204 страницыSAT Practice Book 2009 2010Fedrick Tharun T100% (1)
- Design of Water Supply System-High Rise BLDGДокумент108 страницDesign of Water Supply System-High Rise BLDGcris bunagОценок пока нет
- MathДокумент4 страницыMathHermann Dejero LozanoОценок пока нет
- Examples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsДокумент44 страницыExamples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsNguyen Anh TuОценок пока нет
- 1982 International Rectifier Hexfet Databook PDFДокумент472 страницы1982 International Rectifier Hexfet Databook PDFetmatsudaОценок пока нет
- Automatic Gun Targeting SystemДокумент19 страницAutomatic Gun Targeting SystemManam Nobal100% (1)
- The Guitar in The Sixteenth CenturyДокумент16 страницThe Guitar in The Sixteenth CenturyPat BrandtОценок пока нет
- A Line Follower Robot-ICCAE 2010Документ6 страницA Line Follower Robot-ICCAE 2010Ioan DorofteiОценок пока нет
- LFR ReportДокумент9 страницLFR ReportBilal ShafiОценок пока нет
- Line Follower and Obstacle AvoidingДокумент12 страницLine Follower and Obstacle AvoidingFaisal Nouman60% (5)
- The Engineering of Microprocessor Systems: Guidelines on System DevelopmentОт EverandThe Engineering of Microprocessor Systems: Guidelines on System DevelopmentОценок пока нет
- ABAP Training PlanДокумент4 страницыABAP Training PlanAhmed HamadОценок пока нет
- Arduino Project1Документ3 страницыArduino Project1Kristine Barredo0% (1)
- Human Detection Robot DetailsДокумент6 страницHuman Detection Robot DetailschirayilrichardОценок пока нет
- Major Project - Grid Solving RobotДокумент84 страницыMajor Project - Grid Solving RobotAshish Bharade57% (7)
- PIRMEC PresentationДокумент41 страницаPIRMEC PresentationmanuieeeОценок пока нет
- Under The Guidance Of: Submitted byДокумент16 страницUnder The Guidance Of: Submitted byrajendiran sОценок пока нет
- Fin Irjmets1680752510Документ9 страницFin Irjmets1680752510Kishore Kanna Ravi KumarОценок пока нет
- JOHNIEДокумент8 страницJOHNIEJohn WachiraОценок пока нет
- IJCRT1812243Документ7 страницIJCRT1812243Shaheer AliОценок пока нет
- Advanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2Документ3 страницыAdvanced Military Spying and Bomb Disposal Robot: Senthamizh.R1, Subbu Lakshmi.P1, Subhashree.P1, Prof. M.Priyadarshini2xoxoОценок пока нет
- VSrimukhi BJPremPrasannaKumar DVSPrasad 49Документ4 страницыVSrimukhi BJPremPrasannaKumar DVSPrasad 49Abhay BhujОценок пока нет
- RF Controlled Robotic Vehicle With Metal Detection ProjectДокумент4 страницыRF Controlled Robotic Vehicle With Metal Detection Projectvijay4vlrОценок пока нет
- Thanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayДокумент46 страницThanks: With More Than 1000 Students/ Professors, Subject Experts and Editors Contributing To It Every DayGaurav Sharma0% (1)
- Android Application Controlled Remote Robot Operation: Under The Guidance ofДокумент36 страницAndroid Application Controlled Remote Robot Operation: Under The Guidance ofAndrew ValentineОценок пока нет
- Iot Based Sanitizing Robotic CarДокумент4 страницыIot Based Sanitizing Robotic Carvivekanand_bonalОценок пока нет
- Microcontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaДокумент10 страницMicrocontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaBIniamОценок пока нет
- Automatic Train Collision and Accident Avoidance SystemДокумент22 страницыAutomatic Train Collision and Accident Avoidance SystemAbdul RazzakОценок пока нет
- Metal Detector Robotic VehicleДокумент2 страницыMetal Detector Robotic Vehiclesingup2201Оценок пока нет
- Literature Survey On Automatic Campus CabДокумент5 страницLiterature Survey On Automatic Campus CabGowtham S ShettyОценок пока нет
- Metal Detecting Robot - BluetootДокумент5 страницMetal Detecting Robot - Bluetootraji hammedОценок пока нет
- Obstacleavoidingrobotreportrobot23 090914221509 Phpapp01Документ33 страницыObstacleavoidingrobotreportrobot23 090914221509 Phpapp01Debojit DasОценок пока нет
- MAINДокумент21 страницаMAINVijaykumar SangisettiОценок пока нет
- Asfand Kamran LFR ReportДокумент13 страницAsfand Kamran LFR ReportAbdul RaufОценок пока нет
- Obstacle Avoidance Robot: Submitted byДокумент16 страницObstacle Avoidance Robot: Submitted byNguyen The KhuongОценок пока нет
- S.D.M. College of Engineering & Technology, Dharwad - 580 002Документ8 страницS.D.M. College of Engineering & Technology, Dharwad - 580 002Kumar NeerajОценок пока нет
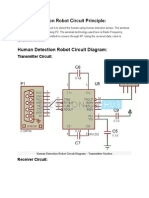
- Human Detection Robot Circuit PrincipleДокумент4 страницыHuman Detection Robot Circuit PrincipleAli KhanОценок пока нет
- Real Time Applications of Encoder and DecoderДокумент10 страницReal Time Applications of Encoder and DecoderSnehaBasakОценок пока нет
- WarField Land Rover That Alerts On Sensing Panted Land MinesДокумент32 страницыWarField Land Rover That Alerts On Sensing Panted Land MinesPavan KPОценок пока нет
- Research Proposal (Plaza)Документ10 страницResearch Proposal (Plaza)Edmarjan ConcepcionОценок пока нет
- Project PPT Final YearДокумент23 страницыProject PPT Final YearAshu KumarОценок пока нет
- Metal and Gas Detecting RobotДокумент8 страницMetal and Gas Detecting Robotraji hammedОценок пока нет
- Spying Robot For Army PurposeДокумент31 страницаSpying Robot For Army Purposeankit25393Оценок пока нет
- Paper 13-Design of An Intelligent Combat Robot For War FieldДокумент7 страницPaper 13-Design of An Intelligent Combat Robot For War FieldDhruv DalwadiОценок пока нет
- Hand Gesture Control Robot PDFДокумент3 страницыHand Gesture Control Robot PDFMd IrfanОценок пока нет
- Bomb Detection Robotics Using Embedded Controller: Gurdas, KaranДокумент4 страницыBomb Detection Robotics Using Embedded Controller: Gurdas, KaranPayel PalОценок пока нет
- War Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsДокумент32 страницыWar Field Spying Robot With Night Vision Wireless Camera by Android ApplicationsharshithaОценок пока нет
- Spying Swarm Robots For Military ApplicationsДокумент39 страницSpying Swarm Robots For Military ApplicationsRishi ChawlaОценок пока нет
- Komodo Manual v1.1Документ24 страницыKomodo Manual v1.1Percy Wilianson Lovon RamosОценок пока нет
- Co Project: Edge Avoiding Robot USING 8051 MicrocontrollerДокумент14 страницCo Project: Edge Avoiding Robot USING 8051 MicrocontrollerJuthik BVОценок пока нет
- Bomb DetectorДокумент24 страницыBomb DetectorAkshay Diwakar100% (3)
- RF Based Dual Mode RobotДокумент17 страницRF Based Dual Mode Robotshuhaibasharaf100% (2)
- Alive Human Detector: Project By, Nayana.K.R Sheefa Shah K.Shifa Sulthana Swetha.N.Murthy Guided By, Yatish.N.SДокумент35 страницAlive Human Detector: Project By, Nayana.K.R Sheefa Shah K.Shifa Sulthana Swetha.N.Murthy Guided By, Yatish.N.SSushma NageshОценок пока нет
- Android Military Spying and Bomb Disposal RobotДокумент7 страницAndroid Military Spying and Bomb Disposal Robot1DA14EC106 R. LALHRIATPUIAОценок пока нет
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyДокумент13 страницFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaОценок пока нет
- Fire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologyДокумент13 страницFire Fighting Robots With Night Vision Camera: Mahatma Gandhi Institute of TechnologypraveenaОценок пока нет
- A Synopsis On Military RobotДокумент15 страницA Synopsis On Military RobotvishalОценок пока нет
- LandmineДокумент17 страницLandminePooja GОценок пока нет
- Spider RobotДокумент38 страницSpider Robotrock starОценок пока нет
- Line Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorДокумент54 страницыLine Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorHasna AbdelwahabОценок пока нет
- Metal Detection Using RF Controlled Robotic VehicleДокумент6 страницMetal Detection Using RF Controlled Robotic VehicleIJRASETPublicationsОценок пока нет
- Line Follower Using AT89c51Документ40 страницLine Follower Using AT89c51api-26623078100% (6)
- RaviДокумент21 страницаRaviRavi JoshiОценок пока нет
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDОт EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDОценок пока нет
- 03 ModularizationДокумент5 страниц03 ModularizationsumnatarajОценок пока нет
- A334 Carino, Patricia Andrea Assignment On ForecastingДокумент3 страницыA334 Carino, Patricia Andrea Assignment On ForecastingPatricia Andrea CariñoОценок пока нет
- Real Time Operating SystemsДокумент15 страницReal Time Operating SystemsSaro VrsОценок пока нет
- Glpi Developer DocumentationДокумент112 страницGlpi Developer Documentationvictorlage7Оценок пока нет
- Chapter 1: Coding Decoding: Important Note: It Is Good To Avoid Pre-Defined Coding Rule To Write A Coded MessageДокумент7 страницChapter 1: Coding Decoding: Important Note: It Is Good To Avoid Pre-Defined Coding Rule To Write A Coded MessageUmamОценок пока нет
- CREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)Документ28 страницCREEP AND FATIGUE FAILURE ANALYSIS OF TURBINE BLADE REPORT-2 (Final)akshithaОценок пока нет
- Ap Unit 1 NotesДокумент42 страницыAp Unit 1 NotesDhruv GoyalОценок пока нет
- E5 - Geotextiles TDR - Rev00Документ2 страницыE5 - Geotextiles TDR - Rev00Mohd Radzi MustaffaОценок пока нет
- en Product OverviewДокумент81 страницаen Product OverviewShakeel AhmedОценок пока нет
- BSS - Report - Effect of Heat in A Building DemonstratorДокумент15 страницBSS - Report - Effect of Heat in A Building DemonstratorAh Mok100% (1)
- Dot NetДокумент9 страницDot NetSuruBabuThalupuruОценок пока нет
- FlopX NT5.1 Patch V1aДокумент5 страницFlopX NT5.1 Patch V1aAmilcar AndradeОценок пока нет
- LTE Rach ProcedureДокумент4 страницыLTE Rach ProcedureDeepak JammyОценок пока нет
- Failure Mode and Effects Analysis of A Process of Reflow Lead-Free SolderingДокумент5 страницFailure Mode and Effects Analysis of A Process of Reflow Lead-Free SolderingSRIDHAREEE61Оценок пока нет
- 09.0 Product Description - MAN EcoTorqueДокумент2 страницы09.0 Product Description - MAN EcoTorquegoginemОценок пока нет
- Hall 2005 NapaeinaДокумент10 страницHall 2005 NapaeinaKellyta RodriguezОценок пока нет
- Module 1 Engineering ScienceДокумент38 страницModule 1 Engineering ScienceLogan JesseОценок пока нет
- Installation, Operation, and Maintenance ManualДокумент54 страницыInstallation, Operation, and Maintenance ManualIsmael Berlanga ResОценок пока нет
- UNIT 14 - On-Screen DigitizingДокумент6 страницUNIT 14 - On-Screen DigitizingResti KharismaОценок пока нет
- 144S... - PCB Series: Signal Conditioned Precision Pressure TransducersДокумент4 страницы144S... - PCB Series: Signal Conditioned Precision Pressure TransducersAnish KumarОценок пока нет
- Downloadble Science NotesДокумент55 страницDownloadble Science NotesJeb PampliegaОценок пока нет
- 6545 Us35000Документ4 страницы6545 Us35000Rafael BarrosОценок пока нет
- OVA37066E: Product Data SheetДокумент2 страницыOVA37066E: Product Data SheetFred BionОценок пока нет