Вам также может понравиться
- Apostila Avaliação Psicopedagógica Com Anexos - AtualizadaДокумент32 страницыApostila Avaliação Psicopedagógica Com Anexos - AtualizadaCris Saraiva86% (29)
- Solomons ResolvidoДокумент142 страницыSolomons ResolvidoAmanda Ramos87% (15)
- Paee - Plano de Atendimento Educacional Especializado-José Carlos Gonçalves (2) FinalizadoДокумент10 страницPaee - Plano de Atendimento Educacional Especializado-José Carlos Gonçalves (2) FinalizadoAndriele Monteiro100% (2)
- Resolution A.960 (23) TraducaoДокумент11 страницResolution A.960 (23) TraducaoMarco Antonio ToscanoОценок пока нет
- Manual Técnico Dos Extintores Portáteis ExtinpelДокумент73 страницыManual Técnico Dos Extintores Portáteis ExtinpelNego1975Оценок пока нет
- Preservado para Um PropósitoДокумент8 страницPreservado para Um Propósitoalanariana2644Оценок пока нет
- Ps 2023 - 2 - Destruição CriativaДокумент38 страницPs 2023 - 2 - Destruição CriativaAssinatura PremiumОценок пока нет
- Hipotálamo e EpitálamoДокумент31 страницаHipotálamo e EpitálamoCamila CarneiroОценок пока нет
- SKW - Skid Solar: Aumente A Eficiência e A Produtividade Da Sua Usina SolarДокумент12 страницSKW - Skid Solar: Aumente A Eficiência e A Produtividade Da Sua Usina SolarCLEYSONОценок пока нет
- BG 1944 v1 n11 FevДокумент123 страницыBG 1944 v1 n11 FevCae MartinsОценок пока нет
- Remédios Caseiros para Desparasitar Gatos - PeritoAnimalДокумент7 страницRemédios Caseiros para Desparasitar Gatos - PeritoAnimalMarcos Antonio da SilvaОценок пока нет
- Alfred Hitchcock - Historias para Ler No CemiterioДокумент164 страницыAlfred Hitchcock - Historias para Ler No CemiterioMagnoMendesОценок пока нет
- Art Reatores Duais RMBДокумент13 страницArt Reatores Duais RMBJosé Augusto Abreu de MouraОценок пока нет
- Lição Completa Tradição e SabedoriaДокумент194 страницыLição Completa Tradição e SabedoriaDaniel GomesОценок пока нет
- Classes Invariáveis ExercíciosДокумент6 страницClasses Invariáveis Exercíciosandre luiz100% (1)
- Fatura Vivo 10-2023Документ3 страницыFatura Vivo 10-2023Paulo FreitasОценок пока нет
- SlidesДокумент52 страницыSlidesWillian Ricardo RitterОценок пока нет
- Inquerito TrabalhoДокумент10 страницInquerito TrabalhoVenancio Rabissone Missomali100% (3)
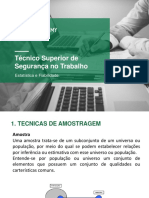
- Estatística e FiabilidadeДокумент54 страницыEstatística e FiabilidadeAnaОценок пока нет
- Os Santos Que Abalaram o Mundo - Santo AgostinhoДокумент14 страницOs Santos Que Abalaram o Mundo - Santo AgostinhoBrendha AndradeОценок пока нет
- Arte Abstrata 22 AgostoДокумент55 страницArte Abstrata 22 Agostovickymsantos17Оценок пока нет
- RelatorioДокумент11 страницRelatorioRick ReedОценок пока нет
- Anexo XIV Modelo de Termo de Confidencialidade e Nao Dvulgacao 0209Документ2 страницыAnexo XIV Modelo de Termo de Confidencialidade e Nao Dvulgacao 0209Alfredo CostaОценок пока нет
- Magias Divinas Do 4º Círculo Reais de Fato ReaisДокумент11 страницMagias Divinas Do 4º Círculo Reais de Fato ReaisDiego Silva DrumondОценок пока нет
- Material Didatico - Treinamento NR35Документ8 страницMaterial Didatico - Treinamento NR35FREAKAZOIDEОценок пока нет
- Parábolas de Jesus - 2022Документ146 страницParábolas de Jesus - 2022Hilmar CesarОценок пока нет
- Algoritmos e Lógica de Programação: Contextualização ContextualizaçãoДокумент10 страницAlgoritmos e Lógica de Programação: Contextualização Contextualizaçãoeng.gustavobritesОценок пока нет
- Metodologia Científica (SLIDES DA AULA)Документ67 страницMetodologia Científica (SLIDES DA AULA)Arts Begbie100% (2)
- Exercícios de Arranjos SimplesДокумент2 страницыExercícios de Arranjos SimplesMarcelia Lopes Azevedo de SiqueiraОценок пока нет
- O Biogás Na AlemanhaДокумент2 страницыO Biogás Na AlemanhaMatheus RodriguesОценок пока нет