Вам также может понравиться
- Buenas Tardes Amados TodosДокумент4 страницыBuenas Tardes Amados TodosallmcbeallОценок пока нет
- Inspeccion de Tableros ElectricosДокумент5 страницInspeccion de Tableros ElectricosallmcbeallОценок пока нет
- Referencias APAДокумент4 страницыReferencias APAallmcbeallОценок пока нет
- Mantenimiento Preventivo Por Ultrasonido 1Документ4 страницыMantenimiento Preventivo Por Ultrasonido 1allmcbeallОценок пока нет
- El ABC de CMMSДокумент4 страницыEl ABC de CMMSallmcbeallОценок пока нет
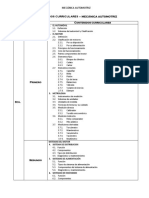
- Contenidos Curriculares Mecanica AutomotrizДокумент3 страницыContenidos Curriculares Mecanica Automotrizmarcos100% (1)
- Astm E797 - E797m Estandar Practice For Mesuring Thickness by Manual Ut Pulse-Echo Contact Method - Leg EspañolДокумент8 страницAstm E797 - E797m Estandar Practice For Mesuring Thickness by Manual Ut Pulse-Echo Contact Method - Leg EspañolGabriel Perez CruzОценок пока нет
- Fracciones Parciales 4 PDFДокумент7 страницFracciones Parciales 4 PDFJavier GuerreroОценок пока нет
- PASO A PASO PENTAGONO CASO 2 MejoradoДокумент16 страницPASO A PASO PENTAGONO CASO 2 MejoradoOscar CabreraОценок пока нет
- Lab 8 LodosДокумент21 страницаLab 8 LodosYania Stephanie Severiche BurgosОценок пока нет
- Examen de Tecn Del Frio CAMILO FORTUNATOДокумент4 страницыExamen de Tecn Del Frio CAMILO FORTUNATOCAMILO FORTUNATO CRUZADO QUISPEОценок пока нет
- Cuchillas de Carbono de TungtenoДокумент20 страницCuchillas de Carbono de TungtenoLuis Orlando Silva VásquezОценок пока нет
- LOU EvaporaciónДокумент15 страницLOU Evaporaciónve_asОценок пока нет
- Calentamiento Global, Con ArquitecturaДокумент6 страницCalentamiento Global, Con ArquitecturaPatricia Urure FloresОценок пока нет
- Direccionamiento de La MemoriaДокумент5 страницDireccionamiento de La MemoriaGabriela SilvaОценок пока нет
- Plan de Manejo de Tránsito y Medidas de Seguridad VialДокумент6 страницPlan de Manejo de Tránsito y Medidas de Seguridad VialAlexis BravoОценок пока нет
- Sistemas de ClimatizaciónДокумент20 страницSistemas de ClimatizaciónAlejandro UrbinaОценок пока нет
- Informe Final Llosa Comunicación AnalogicaДокумент21 страницаInforme Final Llosa Comunicación AnalogicawalterОценок пока нет
- Resistencias en Serie y en ParaleloДокумент9 страницResistencias en Serie y en ParaleloANDERSON AYOS CRESPO ESTUDIANTE ACTIVOОценок пока нет
- MicrometroДокумент6 страницMicrometroRiki TapiaОценок пока нет
- Física Mecánica y Electromagnetismo 2016Документ403 страницыFísica Mecánica y Electromagnetismo 2016Stefania OsorioОценок пока нет
- Modulo de Compresion EdometricaДокумент16 страницModulo de Compresion EdometricaThalia CiezaОценок пока нет
- Catalogo Motoniveladora Gd675 3 KomatsuДокумент12 страницCatalogo Motoniveladora Gd675 3 KomatsuEdith PaHu0% (1)
- TAR Fagor Lavanderia 2023Документ249 страницTAR Fagor Lavanderia 2023fransanchezwОценок пока нет
- Fís 225, Campo MagnéticoДокумент8 страницFís 225, Campo Magnéticoroque bretonОценок пока нет
- EFinitos - Sesion - 02 - 2 - Metodo - VariacionalДокумент50 страницEFinitos - Sesion - 02 - 2 - Metodo - VariacionalFernando Vilavila NoriegaОценок пока нет
- Movilidad, Biodisponibilidad y Degradación Inducida de Isómeros de Hexaclorociclohexano (HCH) en Suelos ContaminadosДокумент234 страницыMovilidad, Biodisponibilidad y Degradación Inducida de Isómeros de Hexaclorociclohexano (HCH) en Suelos ContaminadosIvan CrisantoОценок пока нет
- Construir Un Tornado de Niebla CaseroДокумент2 страницыConstruir Un Tornado de Niebla CaseroAnonymous xTmTjKgz10% (1)
- Cinemática y Mru 4Документ7 страницCinemática y Mru 4Allison Zarely BarriosОценок пока нет
- Manual de Instalacion TraneДокумент26 страницManual de Instalacion TraneRicardo PedrazaОценок пока нет
- Tema 1 CTM IessierrasurДокумент4 страницыTema 1 CTM IessierrasurPelusa97Оценок пока нет
- Ejercicios Fisica II ParcialДокумент2 страницыEjercicios Fisica II ParcialLic Sol ErutОценок пока нет
- Informe 1Документ5 страницInforme 1Alexandra MonsalveОценок пока нет
- Proyecto Fclds Campo ItauДокумент46 страницProyecto Fclds Campo ItauDrillerman Gonzales Ovando100% (1)
- Laboratorio 3 (E. Digital)Документ16 страницLaboratorio 3 (E. Digital)NiltonRamírezОценок пока нет