Вам также может понравиться
- Arduino Earthquake Detector LCD MPU6050Документ3 страницыArduino Earthquake Detector LCD MPU6050kimchen edenelleОценок пока нет
- Arduino Code Self-Balancing RobotДокумент8 страницArduino Code Self-Balancing RobotKevin SimonsОценок пока нет
- Gimbal ProgramaçãoДокумент2 страницыGimbal Programaçãofael.fesaОценок пока нет
- AnexeДокумент5 страницAnexemohamedОценок пока нет
- Obstacle W Line TraceДокумент3 страницыObstacle W Line TraceBern SalvadorОценок пока нет
- Untitled DocumentДокумент2 страницыUntitled DocumentsreerajkrishnakОценок пока нет
- UART Initialization and Transmission on LPC1768 MicrocontrollerДокумент3 страницыUART Initialization and Transmission on LPC1768 Microcontrollermahesh0446Оценок пока нет
- Arduino Code for Line Following RobotДокумент3 страницыArduino Code for Line Following RobotantoinnevongenesisОценок пока нет
- V Last AccДокумент3 страницыV Last AccThinh HoangОценок пока нет
- Lamp IranДокумент18 страницLamp IranSaepul HidayatulohОценок пока нет
- Code MpuДокумент3 страницыCode MpuTrong Vu vanОценок пока нет
- Un Giroscopio: Materiales DroneДокумент9 страницUn Giroscopio: Materiales DroneJuan Carlos VásquezОценок пока нет
- ÔN THI CUỐI KỲ MÔN THIẾT KẾ HỆ ĐIỀU KHIỂN VÀ VI ĐIỀU KHIỂNДокумент20 страницÔN THI CUỐI KỲ MÔN THIẾT KẾ HỆ ĐIỀU KHIỂN VÀ VI ĐIỀU KHIỂNBaBuiDinhОценок пока нет
- Camera VC0706Документ7 страницCamera VC0706KuanTing KuoОценок пока нет
- Final HcodeДокумент5 страницFinal HcodeElyen MageОценок пока нет
- Proyek WokwiДокумент5 страницProyek WokwifebriansyahОценок пока нет
- Servo Motor Control Using SysTick Timer in Keil SoftwareДокумент10 страницServo Motor Control Using SysTick Timer in Keil SoftwareCED19I004 KOWSHIK KUMAR .KОценок пока нет
- 2 Axis Gimbal Brushless With l298nДокумент9 страниц2 Axis Gimbal Brushless With l298nMano OhanianОценок пока нет
- PCF8574 CДокумент2 страницыPCF8574 CRoberto DiasОценок пока нет
- Artificial Horizon and Compass Using ArduinoДокумент11 страницArtificial Horizon and Compass Using ArduinoИнженер Джаджев100% (2)
- ESP CodeДокумент6 страницESP CodeAshwani Dhiman0% (1)
- Praktikum 1: Mikrokontroller Atmega 128 8Mhz Mengirim Karakter A' Dengan Menggunakan Tx0Документ13 страницPraktikum 1: Mikrokontroller Atmega 128 8Mhz Mengirim Karakter A' Dengan Menggunakan Tx0abelichsanОценок пока нет
- Lampiran 1. Source CodeДокумент31 страницаLampiran 1. Source CodeAinur RizkyОценок пока нет
- PROGRAMSДокумент9 страницPROGRAMSJeff Raian Molina BatongbakalОценок пока нет
- ModelДокумент4 страницыModelranbir singhОценок пока нет
- TestDeUart para MATLABДокумент2 страницыTestDeUart para MATLABFederico CarrilloОценок пока нет
- File MKL82Z7Документ6 страницFile MKL82Z7Linda CastilloОценок пока нет
- ATMega 128 8MHz mengirim karakter dengan Tx0 dan Tx1Документ13 страницATMega 128 8MHz mengirim karakter dengan Tx0 dan Tx1abelichsanОценок пока нет
- Define BLYNKДокумент5 страницDefine BLYNKyanuartw7Оценок пока нет
- Instruction HandbotДокумент18 страницInstruction HandbotHaafizee FizОценок пока нет
- CodeДокумент9 страницCodeMuHammad TaHir HasSanОценок пока нет
- Programas Del PIC 18F4550Документ7 страницProgramas Del PIC 18F4550Michael FieldsОценок пока нет
- Lampiran Source Code Arduino Uno Rancang Bangun Sistem Penyiraman Tanaman Menggunakan Sensor Kelembaban TanahДокумент5 страницLampiran Source Code Arduino Uno Rancang Bangun Sistem Penyiraman Tanaman Menggunakan Sensor Kelembaban Tanahaldilla_lukmanОценок пока нет
- Multiplier Script WWWДокумент3 страницыMultiplier Script WWWratnopieroОценок пока нет
- Mpos Development GuidelinesДокумент10 страницMpos Development GuidelinesJuan Gonzalez100% (1)
- Interrupt Performance Characteristics of Arm and FpgaДокумент8 страницInterrupt Performance Characteristics of Arm and FpgaRamalingam Shanmugam100% (1)
- Ard Volt Amp MeterДокумент19 страницArd Volt Amp Meterjesus22229Оценок пока нет
- Code Led MatrixДокумент25 страницCode Led MatrixDanhОценок пока нет
- Chuong TrinДокумент3 страницыChuong TrinMinh Tiến Bùi HồОценок пока нет
- LastДокумент5 страницLastThinh HoangОценок пока нет
- Analisa Uart Menggunakan Manipulasi BitДокумент7 страницAnalisa Uart Menggunakan Manipulasi Bitachmad ainnur hakimОценок пока нет
- Arduino Obstacle Avoiding RobotДокумент5 страницArduino Obstacle Avoiding RobotWalt WhimpennyОценок пока нет
- Obstacle Avoiding Robot Arduino Code-1 PDFДокумент5 страницObstacle Avoiding Robot Arduino Code-1 PDFRaj AryanОценок пока нет
- Arduino obstacle avoiding carДокумент4 страницыArduino obstacle avoiding carCedrick MatibagОценок пока нет
- Arduino Obstacle Avoiding Robot CodeДокумент4 страницыArduino Obstacle Avoiding Robot CodeA.S.W.D chiku SOLUTION W StatusОценок пока нет
- Arduino Obstacle Avoiding Robot CodeДокумент4 страницыArduino Obstacle Avoiding Robot CodeRushank GuptaОценок пока нет
- 7 Z MainДокумент16 страниц7 Z MainKazi RidwanОценок пока нет
- 0d781b1e5042ecaa 00000000000007f9 PsДокумент2 страницы0d781b1e5042ecaa 00000000000007f9 PsPietro MombelliОценок пока нет
- 7cd338ce4c6ea935 0000000000000079 PsДокумент2 страницы7cd338ce4c6ea935 0000000000000079 PsCesar AlvaradoОценок пока нет
- TP3 - FFT en C Con MXUXpressoДокумент5 страницTP3 - FFT en C Con MXUXpressoFederico CarrilloОценок пока нет
- Human Detection - InoДокумент4 страницыHuman Detection - InoAbdОценок пока нет
- CodigoДокумент5 страницCodigopepe pecasОценок пока нет
- Codigo BackupДокумент8 страницCodigo BackupCláudio HilárioОценок пока нет
- Vhdl-Lab Work FileДокумент28 страницVhdl-Lab Work FileHimanshu GautamОценок пока нет
- Cod Lab5 Ex2Документ3 страницыCod Lab5 Ex2biancaОценок пока нет
- 3ICHAKANICHДокумент2 страницы3ICHAKANICHMohamed TalhiOuiОценок пока нет
- Keylogger CodeДокумент9 страницKeylogger Codelt_shak875Оценок пока нет
- Arduino Project 2Документ8 страницArduino Project 2saad HussainОценок пока нет
- 312 Lab Report 1Документ5 страниц312 Lab Report 1NAVYA SRI MANCHIKATLAОценок пока нет
- Phu Luc - Cac Lenh Assembly Cua CPU NIOS IIДокумент19 страницPhu Luc - Cac Lenh Assembly Cua CPU NIOS IIThành TâmОценок пока нет
- NioeДокумент89 страницNioeThành TâmОценок пока нет
- Mcu - Pic - 2019 PDFДокумент60 страницMcu - Pic - 2019 PDFThành TâmОценок пока нет
- MPU6050 Initialization and Configuration FunctionsДокумент60 страницMPU6050 Initialization and Configuration FunctionsThành TâmОценок пока нет
- Chapter 05 - EthernetДокумент120 страницChapter 05 - EthernetThành TâmОценок пока нет
- Bai Tap Chuong 2-Tieng AnhДокумент2 страницыBai Tap Chuong 2-Tieng AnhThành TâmОценок пока нет
- Chapter 12, Lecture 12 - ADC PDFДокумент76 страницChapter 12, Lecture 12 - ADC PDFThành TâmОценок пока нет
- ECE 305 Homework: Week 3: SolutionsДокумент27 страницECE 305 Homework: Week 3: SolutionsdivОценок пока нет
- Classwiz Emulator Subscription: (For Windows)Документ88 страницClasswiz Emulator Subscription: (For Windows)Thành TâmОценок пока нет
- FДокумент8 страницFsergio gonzalezОценок пока нет
- The International System of Units (SI)Документ97 страницThe International System of Units (SI)varaprasadpg100% (1)
- Microcontroller-EN LinhtrungДокумент2 страницыMicrocontroller-EN LinhtrungThành TâmОценок пока нет
- Microcontroller-EN LinhtrungДокумент2 страницыMicrocontroller-EN LinhtrungThành TâmОценок пока нет
- Hosting Company Network SetupДокумент32 страницыHosting Company Network SetupJoyfulness EphaОценок пока нет
- Hotel Management System Functional RequirementsДокумент6 страницHotel Management System Functional RequirementsMohammed ZaidОценок пока нет
- Microsoft Antivirus APIДокумент5 страницMicrosoft Antivirus APIhuachanoОценок пока нет
- Usb Cam LogДокумент3 страницыUsb Cam LogTribhubaneshwar DasОценок пока нет
- Siemens Stardrive v14109743270 SINAMICS S120 TIA DOCU v10 enДокумент27 страницSiemens Stardrive v14109743270 SINAMICS S120 TIA DOCU v10 enCarlos AlvearОценок пока нет
- Coaxial cables, video baluns, power supplies and more listed with specs and pricingДокумент14 страницCoaxial cables, video baluns, power supplies and more listed with specs and pricingMohamed Ibrahim AhamedRasmiОценок пока нет
- .Soldier Health and Position Tracking SystemДокумент4 страницы.Soldier Health and Position Tracking SystemVarunОценок пока нет
- PDI Project Setup and Lifecycle ManagementДокумент57 страницPDI Project Setup and Lifecycle Managementemidavila674Оценок пока нет
- CV-RPA Solution Architect-AAДокумент5 страницCV-RPA Solution Architect-AAAditya ThakurОценок пока нет
- Bca 03Документ2 страницыBca 03Suresh bishtОценок пока нет
- Podar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Документ3 страницыPodar International School Chinchwad STD Xi - (I Unit Test) Subject: Computer Science Date: 8-9-2020 Marks: 40Shriniwas KulkarniОценок пока нет
- PLM XML Export Import AdminДокумент19 страницPLM XML Export Import Adminch_deepakОценок пока нет
- UCSPE Release Notes 3.2 3ePE1Документ8 страницUCSPE Release Notes 3.2 3ePE1Betho CaptusОценок пока нет
- ED Quiz 2 Questions and AnswersДокумент6 страницED Quiz 2 Questions and AnswersMahi ChapliОценок пока нет
- Caching in Distributed File SystemsДокумент56 страницCaching in Distributed File SystemsArchana PanwarОценок пока нет
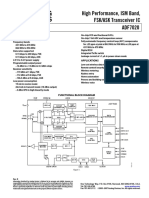
- High Performance, ISM Band, FSK/ASK Transceiver IC ADF7020: FeaturesДокумент48 страницHigh Performance, ISM Band, FSK/ASK Transceiver IC ADF7020: FeaturesDОценок пока нет
- Manual CS141 enДокумент324 страницыManual CS141 enAdrian LunaОценок пока нет
- CEH PRACTICAL NOTESДокумент23 страницыCEH PRACTICAL NOTESproton infosecОценок пока нет
- LM117/LM317A/LM317-N Three-Terminal Adjustable Regulator: FeaturesДокумент40 страницLM117/LM317A/LM317-N Three-Terminal Adjustable Regulator: FeaturesVictor FsОценок пока нет
- AWS Certification Preparation NotesДокумент25 страницAWS Certification Preparation Notesswetha000Оценок пока нет
- 3c - Tinkercad Arduino Simulator TutorialДокумент15 страниц3c - Tinkercad Arduino Simulator TutorialTran Ngoc Hong Quan (K16HL)Оценок пока нет
- Nokia 7210 SAS R10 Data Sheet ENДокумент9 страницNokia 7210 SAS R10 Data Sheet ENVíctor Daniel OzcoОценок пока нет
- JDBC 1Документ23 страницыJDBC 1karanrjoshi2003Оценок пока нет
- LG 22ld350-cb Chassis Lc01aДокумент34 страницыLG 22ld350-cb Chassis Lc01aJuan Pablo Montoya CardenasОценок пока нет
- Background Debug Mode (BDM)Документ33 страницыBackground Debug Mode (BDM)rosmaryОценок пока нет
- Manual TIC ControllerДокумент40 страницManual TIC ControllerSölangs QüntellaОценок пока нет
- 25TRGEXT000054 Introduction To Interfaces v5Документ25 страниц25TRGEXT000054 Introduction To Interfaces v5Tim CCОценок пока нет
- Amba Axi ProtocolДокумент30 страницAmba Axi Protocolanon_82531963Оценок пока нет
- Computer Concepts and C Programming Unit 12310CCP13 by Sushma Shetty PDFДокумент130 страницComputer Concepts and C Programming Unit 12310CCP13 by Sushma Shetty PDFDivya ShriОценок пока нет
- PLCДокумент119 страницPLCamism24100% (1)