Вам также может понравиться
- Mechanical Science NotesДокумент29 страницMechanical Science Notesaaronkanema36Оценок пока нет
- Mechanical Science NotesДокумент29 страницMechanical Science NotesJohn OpiyoОценок пока нет
- Moving Charges and Magnetism Folder.Документ1 страницаMoving Charges and Magnetism Folder.sarthakyedlawar04Оценок пока нет
- Precession and Nutation of A Gyroscope Ue1040500 Ue1040500: Spinning Mo T IonДокумент1 страницаPrecession and Nutation of A Gyroscope Ue1040500 Ue1040500: Spinning Mo T IonZiad Al-ZeinОценок пока нет
- Fill in The Data For The Grey Shaded Areas Only: 2019 Inlet Spacing - Curb and Gutter Spreadsheet (English Units)Документ3 страницыFill in The Data For The Grey Shaded Areas Only: 2019 Inlet Spacing - Curb and Gutter Spreadsheet (English Units)Mauricio DelgadoОценок пока нет
- Our Town July 1, 1938Документ4 страницыOur Town July 1, 1938narberthcivicОценок пока нет
- Head LossДокумент1 страницаHead LossNghiaОценок пока нет
- BMKJ MiniДокумент1 страницаBMKJ Minibhabaranjan pradhanОценок пока нет
- Souq Waqif CHW Pump Head - Rev-01a As Per Approved DWGДокумент1 страницаSouq Waqif CHW Pump Head - Rev-01a As Per Approved DWGKarthy GanesanОценок пока нет
- Angle of Friction, Wedges & ScrewsДокумент2 страницыAngle of Friction, Wedges & ScrewsJessica De GuzmanОценок пока нет
- Typei: CantileverДокумент7 страницTypei: CantileverBharatNayyarОценок пока нет
- DFT in Depth The Exchange-Correlation Term: Robin HirschlДокумент27 страницDFT in Depth The Exchange-Correlation Term: Robin HirschlTran Phan Thuy LinhОценок пока нет
- 1 Chilled Water Pump Head CalculationДокумент6 страниц1 Chilled Water Pump Head CalculationMohammed TanveerОценок пока нет
- Suction Head Calculation: Local Factors of FittingsДокумент1 страницаSuction Head Calculation: Local Factors of Fittingsmohamad azipОценок пока нет
- (Cont. Next Page) 10 Toyota Fortuner: Power Source ECT and A/T Indicator (1GR-FE)Документ3 страницы(Cont. Next Page) 10 Toyota Fortuner: Power Source ECT and A/T Indicator (1GR-FE)alexander pintoОценок пока нет
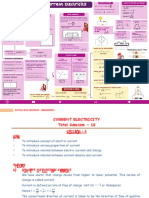
- Current ElectricityДокумент74 страницыCurrent ElectricitymahiОценок пока нет
- Electric CurrentДокумент1 страницаElectric CurrentMahes JeyОценок пока нет
- 8.1 Liquefaction Calculation v2Документ11 страниц8.1 Liquefaction Calculation v2Probal ProsoilОценок пока нет
- Pumps Head Loss Calculation (Colbrook Formula) : Local Factors of FittingsДокумент22 страницыPumps Head Loss Calculation (Colbrook Formula) : Local Factors of FittingsAhmed EbrahimОценок пока нет
- Oscillations MindmapДокумент1 страницаOscillations Mindmapsarthakyedlawar04Оценок пока нет
- GURPS 4e Combat Actions: ReadyДокумент1 страницаGURPS 4e Combat Actions: ReadyajardoorОценок пока нет
- Wall Chart NFMT eДокумент1 страницаWall Chart NFMT eArchana PathakОценок пока нет
- JAZZ CRIMES-Trumpet 1Документ2 страницыJAZZ CRIMES-Trumpet 1jwelchez1Оценок пока нет
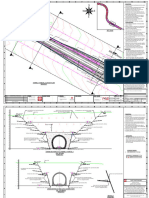
- T1 P2 Exc. and Support Portal DrawingДокумент3 страницыT1 P2 Exc. and Support Portal Drawinggoutampatra.official.91Оценок пока нет
- WildWildWest - AL3 Solo ViolinДокумент2 страницыWildWildWest - AL3 Solo Violinpacoserramartinez257Оценок пока нет
- Suction Head CalcДокумент5 страницSuction Head CalcNghiaОценок пока нет
- Head LossДокумент1 страницаHead LossamrОценок пока нет
- Scope: Old & New Packing Hall Department / Plant: Ef&P Review DateДокумент75 страницScope: Old & New Packing Hall Department / Plant: Ef&P Review Datederek venterОценок пока нет
- Lecture5 PDFДокумент14 страницLecture5 PDFante mitarОценок пока нет
- Rough - Riders Galop or March OboeДокумент1 страницаRough - Riders Galop or March Oboeluis floresОценок пока нет
- I Go Dance Revised Jul 2014Документ22 страницыI Go Dance Revised Jul 2014EEEОценок пока нет
- 2023 - 02 - 13 - CSP Second Floor LayoutДокумент1 страница2023 - 02 - 13 - CSP Second Floor LayoutmyphotosfetОценок пока нет
- Donna Donna ScoreДокумент8 страницDonna Donna ScoreRose SmithОценок пока нет
- TABLE NO. - 5.2 Tentative Salient Features of Pumping Stations of Cluster - XviiiДокумент1 страницаTABLE NO. - 5.2 Tentative Salient Features of Pumping Stations of Cluster - XviiiNaveen NagisettiОценок пока нет
- K2 Awp 051gen Ict RP 000001Документ1 страницаK2 Awp 051gen Ict RP 000001anse1Оценок пока нет
- Single Line Diagram: Service EntranceДокумент1 страницаSingle Line Diagram: Service EntranceRheyJun Paguinto AnchetaОценок пока нет
- Cinetica Particula 1d 2d 2da Ley NewtonДокумент7 страницCinetica Particula 1d 2d 2da Ley NewtonJordan Castillo FiestasОценок пока нет
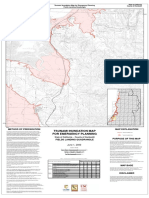
- Tsunami Inundation FieldsLanding Quad HumboldtДокумент1 страницаTsunami Inundation FieldsLanding Quad HumboldtjnugahaОценок пока нет
- Buzz and Warm Up+++ Buzzer TrumpetДокумент2 страницыBuzz and Warm Up+++ Buzzer Trumpetzwacklfred.shОценок пока нет
- 5 Hilux (Cont. Next Page) : Power Source Engine Control (1TR-FE, 2TR-FE)Документ4 страницы5 Hilux (Cont. Next Page) : Power Source Engine Control (1TR-FE, 2TR-FE)Asd Man100% (2)
- 22 Toyota Innova (Cont. Next Page) : Power Source Air Conditioner (Front) (From Feb. 2012 Production)Документ2 страницы22 Toyota Innova (Cont. Next Page) : Power Source Air Conditioner (Front) (From Feb. 2012 Production)Khả Phúc 2100% (1)
- A A B B C C C C C C D D F F H H J JДокумент1 страницаA A B B C C C C C C D D F F H H J JSatish KumarОценок пока нет
- OpAmps EquationsДокумент1 страницаOpAmps EquationsTelmo MiguelОценок пока нет
- Arvin: Vintage 50Документ14 страницArvin: Vintage 50rodrigoОценок пока нет
- L22 RANS ModelsДокумент11 страницL22 RANS ModelsShamik MajumdarОценок пока нет
- KU-TWK-10-CI-PLP-2108 - A-Tawke Chemical Storage Area-R.C Details PDFДокумент1 страницаKU-TWK-10-CI-PLP-2108 - A-Tawke Chemical Storage Area-R.C Details PDFAhmad Farhad MadaniОценок пока нет
- 18 Violin I AДокумент1 страница18 Violin I AEdmar EmanoellОценок пока нет
- HW12 (Aot)Документ1 страницаHW12 (Aot)Sam BОценок пока нет
- A Liberating Snowpath StrollДокумент11 страницA Liberating Snowpath StrollMing Yi QuekОценок пока нет
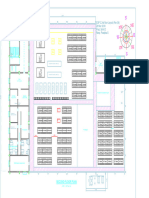
- Floor Plan LayoutДокумент6 страницFloor Plan Layoutaranetasquare100% (1)
- The Lion Sleeps Tonight PDFДокумент3 страницыThe Lion Sleeps Tonight PDFjay marianoОценок пока нет
- Sodapdf Merged 9Документ3 страницыSodapdf Merged 9harshrajclass9brollno.21Оценок пока нет
- A - Flauto in C: Hark! The Herald Angels SingДокумент3 страницыA - Flauto in C: Hark! The Herald Angels SingpiesseОценок пока нет
- (Cont. Next Page) (Cont. Next Page) 39 Toyota Fortuner: Power Source ECT and A/T Indicator (1KD-FTV)Документ2 страницы(Cont. Next Page) (Cont. Next Page) 39 Toyota Fortuner: Power Source ECT and A/T Indicator (1KD-FTV)alexander pintoОценок пока нет
- KEC-RWSS-GAN-KHA-SLU-RC-014-Layout 1Документ1 страницаKEC-RWSS-GAN-KHA-SLU-RC-014-Layout 1IkramОценок пока нет
- Installation Drawings Details Zone 2D - Area 03 and Area 04: Key PlanДокумент1 страницаInstallation Drawings Details Zone 2D - Area 03 and Area 04: Key PlanLê Quốc TínОценок пока нет
- SM 1Документ87 страницSM 1Gilberto BerdealОценок пока нет
- 7 IS 300 / 200 (LHD) : Power Source Taillight and Stop Light (S/D) Back-Up LightДокумент1 страница7 IS 300 / 200 (LHD) : Power Source Taillight and Stop Light (S/D) Back-Up LightVishal Vishal VishalОценок пока нет
- Fireproof Balloon Experiment ApplicationДокумент1 страницаFireproof Balloon Experiment ApplicationAbdullah Ahsan AhmedОценок пока нет
- What Is Anemometer?: Science ExperimentДокумент2 страницыWhat Is Anemometer?: Science ExperimentAbdullah Ahsan AhmedОценок пока нет
- Band Theory of SolidsДокумент2 страницыBand Theory of SolidsAbdullah Ahsan AhmedОценок пока нет
- Bar Magnet As An Equivalent SolenoidДокумент2 страницыBar Magnet As An Equivalent SolenoidAbdullah Ahsan AhmedОценок пока нет
- Azimuthal Quantum NumberДокумент1 страницаAzimuthal Quantum NumberAbdullah Ahsan AhmedОценок пока нет
- Archimedes principle equation: Mass Density × V olume Ρ × VДокумент2 страницыArchimedes principle equation: Mass Density × V olume Ρ × VAbdullah Ahsan AhmedОценок пока нет
- Accuracy Precision MeasurementДокумент2 страницыAccuracy Precision MeasurementAbdullah Ahsan AhmedОценок пока нет
- Anatomy of Human EarДокумент2 страницыAnatomy of Human EarAbdullah Ahsan AhmedОценок пока нет
- Adiabatic Process DerivationДокумент2 страницыAdiabatic Process DerivationAbdullah Ahsan AhmedОценок пока нет
- What Is Amplitude Modulation (AM) ?: DiodeДокумент1 страницаWhat Is Amplitude Modulation (AM) ?: DiodeAbdullah Ahsan AhmedОценок пока нет
- Aristotle's FallacyДокумент1 страницаAristotle's FallacyAbdullah Ahsan AhmedОценок пока нет
- Honors Physics - Friction InclinesДокумент5 страницHonors Physics - Friction InclinesAbdullah Ahsan AhmedОценок пока нет
- Acceleration:: Universal Law of GravitationДокумент2 страницыAcceleration:: Universal Law of GravitationAbdullah Ahsan AhmedОценок пока нет
- Physics 111 Homework SOLUTION, Week 4, Chapter 5, Sec 1-7Документ15 страницPhysics 111 Homework SOLUTION, Week 4, Chapter 5, Sec 1-7Abdullah Ahsan AhmedОценок пока нет
- What Is Atomic Spectra?Документ3 страницыWhat Is Atomic Spectra?Abdullah Ahsan AhmedОценок пока нет
- Friction Forces Are Everywhere in Our Daily LifeДокумент16 страницFriction Forces Are Everywhere in Our Daily LifeAbdullah Ahsan AhmedОценок пока нет
- Friction & Inclined Planes: Honors PhysicsДокумент9 страницFriction & Inclined Planes: Honors PhysicsAbdullah Ahsan AhmedОценок пока нет
- Force of Static and Kinetic Friction - Problems and SolutionsДокумент2 страницыForce of Static and Kinetic Friction - Problems and SolutionsAbdullah Ahsan AhmedОценок пока нет
- Force of Static and Kinetic Friction - Problems and SolutionsДокумент2 страницыForce of Static and Kinetic Friction - Problems and SolutionsAbdullah Ahsan AhmedОценок пока нет
- 1 Periodical Test in Science 8Документ4 страницы1 Periodical Test in Science 8Jessa Mae Banquirig50% (2)
- Distance Learning Programme: Jee (Main) : Leader Test Series / Joint Package CourseДокумент38 страницDistance Learning Programme: Jee (Main) : Leader Test Series / Joint Package CourseAbuzar AzharОценок пока нет
- 5.EMT Question Papers.Документ4 страницы5.EMT Question Papers.Praveen RajkumarОценок пока нет
- Motion in One DimensionДокумент8 страницMotion in One DimensionSukanya VedavyasaОценок пока нет
- (FZM 114) Fizik - Ii: Dr. Çağın KamişcioğluДокумент16 страниц(FZM 114) Fizik - Ii: Dr. Çağın KamişcioğluRr AaaОценок пока нет
- Light-Reflection and Refraction PPT 1Документ42 страницыLight-Reflection and Refraction PPT 1api-285160905Оценок пока нет
- Kodak Verichrome PanДокумент4 страницыKodak Verichrome Panfoster747Оценок пока нет
- Gallery of Diverse Cells: Microscope Lab By: Emma KimuraДокумент10 страницGallery of Diverse Cells: Microscope Lab By: Emma Kimuraapi-346991843Оценок пока нет
- Questions of GravitationДокумент21 страницаQuestions of GravitationSanskriti MehrotraОценок пока нет
- Kuliah 6 Geometri Foto Udara PDFДокумент106 страницKuliah 6 Geometri Foto Udara PDFIntan LestariОценок пока нет
- Pharmaceutical Botany With Taxonomy Laboratory (PHBIO 1101L)Документ6 страницPharmaceutical Botany With Taxonomy Laboratory (PHBIO 1101L)Yuri DryzgaОценок пока нет
- Understanding Base Quantities and Derived QuantitiesДокумент14 страницUnderstanding Base Quantities and Derived QuantitiesKogeela Vani VeerasingamОценок пока нет
- Scientific Revolution ProjectДокумент3 страницыScientific Revolution Projectapi-345188268Оценок пока нет
- Lecture SP 015 Lesson 2 PDFДокумент23 страницыLecture SP 015 Lesson 2 PDFAnonymous hKDpglОценок пока нет
- Textised! L12 Working With CCD DataДокумент6 страницTextised! L12 Working With CCD DataVickySwiftОценок пока нет
- Physics Olympiad: Entia Non Multiplicanda Sunt Praeter NecessitatemДокумент10 страницPhysics Olympiad: Entia Non Multiplicanda Sunt Praeter Necessitatemsanjeev1000Оценок пока нет
- Ep 1 Unit PDFДокумент33 страницыEp 1 Unit PDFnaniОценок пока нет
- Study Guide For Mid-Term 3 SolutionsДокумент8 страницStudy Guide For Mid-Term 3 Solutionskuumba0% (3)
- Questions On LightsДокумент6 страницQuestions On Lightsapi-245778870Оценок пока нет
- PS Quarter 2 Week 3Документ6 страницPS Quarter 2 Week 3edgardo viadorОценок пока нет
- 01 Ray Optics MMДокумент71 страница01 Ray Optics MMmonikeshОценок пока нет
- Quick Study Academic Physics 600dpiДокумент6 страницQuick Study Academic Physics 600dpiSunshineK95100% (8)
- Ardms MCQДокумент120 страницArdms MCQDr Khan100% (4)
- Sound Absorbing Materials (Acoustical Materials) : Sabine's FormulaДокумент33 страницыSound Absorbing Materials (Acoustical Materials) : Sabine's FormulaSonisha AryalОценок пока нет
- LaserДокумент27 страницLaserskОценок пока нет
- PCS130 Interference and Diffraction of Light 0Документ6 страницPCS130 Interference and Diffraction of Light 0Ekan AhmadОценок пока нет
- Chapter 25 Reflection of Light Mirrors Cutnell11e - PPTДокумент28 страницChapter 25 Reflection of Light Mirrors Cutnell11e - PPTbob robОценок пока нет
- Moldcast Solus Brochure 1997Документ12 страницMoldcast Solus Brochure 1997Alan MastersОценок пока нет
- Minolta Special LensesДокумент15 страницMinolta Special LensesazamamaОценок пока нет
- Further MechanicsДокумент11 страницFurther MechanicsBecky TenneyОценок пока нет