Вам также может понравиться
- Mathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsОт EverandMathematical and Computational Modeling: With Applications in Natural and Social Sciences, Engineering, and the ArtsRoderick MelnikОценок пока нет
- Characteristic Modes: Theory and Applications in Antenna EngineeringОт EverandCharacteristic Modes: Theory and Applications in Antenna EngineeringОценок пока нет
- BE 2008 Electronics&Telecommunication PDFДокумент71 страницаBE 2008 Electronics&Telecommunication PDFcontrasterОценок пока нет
- Old Q.papers M.tech I SemДокумент15 страницOld Q.papers M.tech I SemallakagopichandОценок пока нет
- Mtech. Precision EngineeringДокумент5 страницMtech. Precision Engineeringsimalaravi100% (1)
- Me 1Документ436 страницMe 1Akshay Mane0% (1)
- Radiation & Microwave Techniques: B.E. (E & TC) (1997 Course)Документ66 страницRadiation & Microwave Techniques: B.E. (E & TC) (1997 Course)Prashant PhanseОценок пока нет
- r05410207 Vlsi DesignДокумент7 страницr05410207 Vlsi Design9010469071Оценок пока нет
- Computer GraphicsДокумент2 страницыComputer GraphicsAbhijith MarathakamОценок пока нет
- Answer All The Questions: From-To Data For The Parts Processed by The Machines Are Shown in The Table BelowДокумент2 страницыAnswer All The Questions: From-To Data For The Parts Processed by The Machines Are Shown in The Table Belowbrahma2deen2chaudharОценок пока нет
- BE ElectricalДокумент45 страницBE ElectricalOmkar SheteОценок пока нет
- Simulation of Three-PhaseДокумент4 страницыSimulation of Three-PhasenanostallmannОценок пока нет
- rr420305 RoboticsДокумент8 страницrr420305 RoboticsSRINIVASA RAO GANTAОценок пока нет
- Computer Graphics JNTU Question PaperДокумент4 страницыComputer Graphics JNTU Question PapermannanabdulsattarОценок пока нет
- BE 2008 Electronics&TelecommunicationДокумент71 страницаBE 2008 Electronics&TelecommunicationAdib ShaikhОценок пока нет
- (3hours) : CompulsoryДокумент7 страниц(3hours) : CompulsorySaima ZainabОценок пока нет
- InstrumentationДокумент7 страницInstrumentationNagaValliОценок пока нет
- 07a81002 RoboticsandautomationДокумент8 страниц07a81002 RoboticsandautomationSharanya ThirichinapalliОценок пока нет
- Tips Labview DevelopmentДокумент4 страницыTips Labview Developmentviernes06Оценок пока нет
- rr322403 RoboticsДокумент5 страницrr322403 RoboticsSRINIVASA RAO GANTAОценок пока нет
- 15P701Документ3 страницы15P701rajakrishnanОценок пока нет
- 5 Oct11Документ12 страниц5 Oct11Manu SeaОценок пока нет
- Total No of Questions: (8) Seat No.:: RZ - P V 11 CO-) I 0/ 'N CH Gen-)Документ2 страницыTotal No of Questions: (8) Seat No.:: RZ - P V 11 CO-) I 0/ 'N CH Gen-)sujitppawarОценок пока нет
- MechatronicsДокумент4 страницыMechatronicsandhracollegesОценок пока нет
- (3965) - 636 M.E. (E & TC) : (VLSI & Embedded Systems)Документ14 страниц(3965) - 636 M.E. (E & TC) : (VLSI & Embedded Systems)Manu SeaОценок пока нет
- 254464.1 Car Mikac VezaДокумент6 страниц254464.1 Car Mikac VezaengrodeОценок пока нет
- C7 LoigiaiДокумент25 страницC7 Loigiaithinhtruong17092003Оценок пока нет
- RR420305 Robotics PDFДокумент9 страницRR420305 Robotics PDFSarath ChandraОценок пока нет
- ME-mit Admission FormДокумент1 057 страницME-mit Admission FormBittu50% (2)
- T.E (2019 Pattern)Документ852 страницыT.E (2019 Pattern)Shubham SagarОценок пока нет
- WWW - Manaresults.Co - In: What Is Barkhausen Criteria For Sustained Oscillation?Документ2 страницыWWW - Manaresults.Co - In: What Is Barkhausen Criteria For Sustained Oscillation?TriveniОценок пока нет
- Thesis Modeling of Two Rotor MIMO SystemДокумент68 страницThesis Modeling of Two Rotor MIMO SystemEyad Al-MohatwaryОценок пока нет
- Stucor QP Me8791Документ6 страницStucor QP Me8791prabhakaranОценок пока нет
- Dec 2009Документ2 страницыDec 2009Asad MohammadОценок пока нет
- Stucor Qp-Me8501Документ22 страницыStucor Qp-Me8501bala vigneshОценок пока нет
- Remotely Operated Vehicle For Underwater InspectionДокумент5 страницRemotely Operated Vehicle For Underwater InspectionVIVA-TECH IJRIОценок пока нет
- Model Test Paper: ABES Institute of Technology, GhaziabadДокумент2 страницыModel Test Paper: ABES Institute of Technology, GhaziabadYogesh Kumar GaurОценок пока нет
- ROBOTICS QUESTION BANK Unit I II III& IV BY MAHENDRABABU MEKALA, PBRVITS KAVALIДокумент5 страницROBOTICS QUESTION BANK Unit I II III& IV BY MAHENDRABABU MEKALA, PBRVITS KAVALIMahendra Babu Mekala61% (23)
- Ece-Vii-dsp Algorithms & Architecture (10ec751) - AssignmentДокумент9 страницEce-Vii-dsp Algorithms & Architecture (10ec751) - AssignmentMuhammadMansoorGohar100% (1)
- F Capacitor, Find The Appropriate Value ofДокумент2 страницыF Capacitor, Find The Appropriate Value ofJoginder YadavОценок пока нет
- ECE4680 Computer Organization and Architecture Lecture 2: Performance EvaluationДокумент22 страницыECE4680 Computer Organization and Architecture Lecture 2: Performance EvaluationNarender KumarОценок пока нет
- Robotic Non-Destructive InspectionДокумент8 страницRobotic Non-Destructive InspectionFadhli AzinnuddinОценок пока нет
- R & CIM Exam-I3 - Q$AДокумент7 страницR & CIM Exam-I3 - Q$AKamarul NizamОценок пока нет
- (Common To CSE & IT) Cs 2253 MarksДокумент1 страница(Common To CSE & IT) Cs 2253 Marksrsk20480Оценок пока нет
- r05311902 Computer GraphicsДокумент4 страницыr05311902 Computer GraphicsSRINIVASA RAO GANTAОценок пока нет
- Paper ID (ME404l: Rou No. .................. T'-? Ur Au,,tq B (Ed - JДокумент2 страницыPaper ID (ME404l: Rou No. .................. T'-? Ur Au,,tq B (Ed - JAsad MohammadОценок пока нет
- Numerical Control and Industrial Robotics: Review QuestionsДокумент9 страницNumerical Control and Industrial Robotics: Review QuestionsDavid GonzalezОценок пока нет
- FinalДокумент35 страницFinalnagaraj kavya24100% (1)
- Implementation of Simultaneous Localization and Mapping On PeoplebotДокумент108 страницImplementation of Simultaneous Localization and Mapping On Peoplebottalha manzoorОценок пока нет
- Automation in ManufacturingДокумент8 страницAutomation in ManufacturingPradeepkumarKatgiОценок пока нет
- Mtech July 2018 1st Sem0001Документ13 страницMtech July 2018 1st Sem0001Isaac SabuОценок пока нет
- Course Code: MET 406 Gths/Rs - 19 / 7659 Eighth Semester B. E. (Mechanical Engineering) ExaminationДокумент3 страницыCourse Code: MET 406 Gths/Rs - 19 / 7659 Eighth Semester B. E. (Mechanical Engineering) ExaminationMubarika SabirОценок пока нет
- Configuring of 3-Axis Vertical CNC Machine For Rapid Prototyping With Two Translatory and One Rotary AxesДокумент9 страницConfiguring of 3-Axis Vertical CNC Machine For Rapid Prototyping With Two Translatory and One Rotary AxesZoran DimicОценок пока нет
- ROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliДокумент10 страницROBOTICSQUESTION BANK Unit V, Vi, Vii, Viii by Mahendra Babu Mekala, PBRVITS, KavaliMahendra Babu Mekala100% (2)
- A New Direct Torque Control For Induction Machine Drive System With Low Torque and Flux Ripples Using XSGДокумент12 страницA New Direct Torque Control For Induction Machine Drive System With Low Torque and Flux Ripples Using XSGLACHARI AchrafОценок пока нет
- M.E. (VLSI & Embedded System) : Asic Design and Modelling (2008 Course)Документ9 страницM.E. (VLSI & Embedded System) : Asic Design and Modelling (2008 Course)Manu SeaОценок пока нет
- S.E. 2012 (Mechanical, Mechanical Sandwich, Automobile)Документ2 страницыS.E. 2012 (Mechanical, Mechanical Sandwich, Automobile)Tejas AdakОценок пока нет
- Cao Previous QNДокумент9 страницCao Previous QNanusha deviОценок пока нет
- Me (2002Документ1 031 страницаMe (2002rahimmullaОценок пока нет
- 5G System Design: Architectural and Functional Considerations and Long Term ResearchОт Everand5G System Design: Architectural and Functional Considerations and Long Term ResearchОценок пока нет
- Module 3: Human Resources and Job Design: Multiple ChoiceДокумент4 страницыModule 3: Human Resources and Job Design: Multiple ChoiceKamarul NizamОценок пока нет
- Organization of Production: Test IiiДокумент9 страницOrganization of Production: Test IiiKamarul NizamОценок пока нет
- Discussion Started by Group Replies Unread Last Post: Add A New TopicДокумент2 страницыDiscussion Started by Group Replies Unread Last Post: Add A New TopicKamarul NizamОценок пока нет
- MODULE 2 Multiple ChoiceДокумент5 страницMODULE 2 Multiple ChoiceKamarul NizamОценок пока нет
- MODULE 3 True and FalseДокумент2 страницыMODULE 3 True and FalseKamarul NizamОценок пока нет
- Weekly Partner Statement - 2018-W25Документ5 страницWeekly Partner Statement - 2018-W25Kamarul NizamОценок пока нет
- Application For GRADUATE Membership of Engineers AustraliaДокумент4 страницыApplication For GRADUATE Membership of Engineers AustraliaKamarul NizamОценок пока нет
- Universiti Kuala Lumpur Malaysia France Institute: Metal Fabrication Technology DepartmentДокумент21 страницаUniversiti Kuala Lumpur Malaysia France Institute: Metal Fabrication Technology DepartmentKamarul NizamОценок пока нет
- Assignment 1 CylinderДокумент2 страницыAssignment 1 CylinderKamarul NizamОценок пока нет
- Assignment No 4: University of Kuala Lumpur - Malaysia France InstituteДокумент3 страницыAssignment No 4: University of Kuala Lumpur - Malaysia France InstituteKamarul NizamОценок пока нет
- Session 1 - Smart Board Training PDFДокумент2 страницыSession 1 - Smart Board Training PDFKamarul NizamОценок пока нет
- Porocity InclusionДокумент4 страницыPorocity InclusionKamarul NizamОценок пока нет
- Assignment 3 TransitionДокумент4 страницыAssignment 3 TransitionKamarul NizamОценок пока нет
- Assignment 7 Marking Scheme For FFD 24502 - Plate and Sheet DVLP DWGДокумент2 страницыAssignment 7 Marking Scheme For FFD 24502 - Plate and Sheet DVLP DWGKamarul NizamОценок пока нет
- Assignment 2 PyramidДокумент1 страницаAssignment 2 PyramidKamarul NizamОценок пока нет
- Rev Ques AnswerДокумент23 страницыRev Ques AnswerKamarul NizamОценок пока нет
- Components Cad Cam CaeДокумент15 страницComponents Cad Cam CaeKamarul Nizam100% (1)
- Assignments Checklist and Marks January 2014Документ2 страницыAssignments Checklist and Marks January 2014Kamarul NizamОценок пока нет
- Assembly ModellingДокумент32 страницыAssembly ModellingKamarul NizamОценок пока нет
- R & CIM Exam-I3 - Q$AДокумент7 страницR & CIM Exam-I3 - Q$AKamarul NizamОценок пока нет
- Intro2cad Cam CaeДокумент29 страницIntro2cad Cam CaeKamarul NizamОценок пока нет
- Solutions For Questions/Problems of Chapter 5Документ11 страницSolutions For Questions/Problems of Chapter 5Kamarul NizamОценок пока нет
- Campus Internal Proposal Department / Section:: Human Capital Unit, Unikl MfiДокумент6 страницCampus Internal Proposal Department / Section:: Human Capital Unit, Unikl MfiKamarul NizamОценок пока нет
- 4pipefitting Pressure Test 170129022549 PDFДокумент13 страниц4pipefitting Pressure Test 170129022549 PDFKamarul NizamОценок пока нет
- 1 - IntroductionДокумент10 страниц1 - IntroductionKamarul NizamОценок пока нет
- PricelistДокумент2 страницыPricelistKamarul NizamОценок пока нет
- Bloom's Taxonomy Indicator v3.32Документ47 страницBloom's Taxonomy Indicator v3.32Kamarul NizamОценок пока нет
- Memo Deadline For Submission of CourseworkДокумент4 страницыMemo Deadline For Submission of CourseworkKamarul NizamОценок пока нет
- Practical F2F Hours: Prof. Dr. Azanam Shah Hashim Deputy President (Academic & Technology)Документ7 страницPractical F2F Hours: Prof. Dr. Azanam Shah Hashim Deputy President (Academic & Technology)Kamarul NizamОценок пока нет
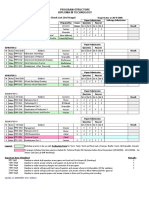
- Final Paper Submission Check List (3rd Stage) : Program Structure Diploma in TechnologyДокумент2 страницыFinal Paper Submission Check List (3rd Stage) : Program Structure Diploma in TechnologyKamarul NizamОценок пока нет
- Q3. Quiz1Документ2 страницыQ3. Quiz1Jinkee F. Sta MariaОценок пока нет
- Neha 2020 TendinteДокумент16 страницNeha 2020 TendinteIrina BesliuОценок пока нет
- 6-SiFive Promotes RISC-V 20190905Документ29 страниц6-SiFive Promotes RISC-V 20190905nauman wazirОценок пока нет
- INSTRUCTIONS FOR USOL PRIVATE REAPPEAR DE January 2022Документ4 страницыINSTRUCTIONS FOR USOL PRIVATE REAPPEAR DE January 2022RaghavОценок пока нет
- U18 Hall Sensor FanДокумент6 страницU18 Hall Sensor FanscribdxtestxОценок пока нет
- P ID Diagram Basics Symbols 1Документ12 страницP ID Diagram Basics Symbols 1Aung Netflix100% (1)
- UPS 348-01-01 PowerWAVE 3000T PDFДокумент4 страницыUPS 348-01-01 PowerWAVE 3000T PDFShahin ShajahanОценок пока нет
- Nokia.Документ1 страницаNokia.kshiti ahireОценок пока нет
- Project SchedulingДокумент61 страницаProject SchedulingGummanur SreenathОценок пока нет
- MCU Based Multi Functions Automated Corn Planting RoverДокумент82 страницыMCU Based Multi Functions Automated Corn Planting Roveraldrinvic0005Оценок пока нет
- Activity 3 - 2nd QRTRДокумент3 страницыActivity 3 - 2nd QRTRdagamacvincentjade10Оценок пока нет
- Gd129Ni Single Point Infra-Red Gas DetectorДокумент2 страницыGd129Ni Single Point Infra-Red Gas Detectorryan azzaamОценок пока нет
- Popular Plan Vouchers (FRC) Popular Rate Cutter StvsДокумент1 страницаPopular Plan Vouchers (FRC) Popular Rate Cutter StvsRahul SinghОценок пока нет
- DS-2CD1723G0-IZ-C Datasheet V5.5.122 20210531Документ6 страницDS-2CD1723G0-IZ-C Datasheet V5.5.122 20210531juancarlosОценок пока нет
- Data SheetДокумент24 страницыData Sheetbashok20Оценок пока нет
- Chapter2 Mobility ManagementДокумент13 страницChapter2 Mobility ManagementSuraj Shah0% (2)
- Introducing Koreas Most Promising Medical Device Companies CompressДокумент76 страницIntroducing Koreas Most Promising Medical Device Companies CompressNathalia VillamizarОценок пока нет
- Accredited by NAAC A++ Greenfields, Vaddeswaram-522502, Guntur District, Andrapradesh, INDIAДокумент4 страницыAccredited by NAAC A++ Greenfields, Vaddeswaram-522502, Guntur District, Andrapradesh, INDIAGopinath GangadhariОценок пока нет
- What Are The Best Telemarketing Scripts?: 4 AnswersДокумент4 страницыWhat Are The Best Telemarketing Scripts?: 4 AnswersDaniela SoaresОценок пока нет
- Submitted By: Athira Sugathan 10258863 Deepu Pradeep 10248949 Navin Kumar 10265553Документ10 страницSubmitted By: Athira Sugathan 10258863 Deepu Pradeep 10248949 Navin Kumar 10265553ammini kaosОценок пока нет
- Movi PackДокумент6 страницMovi PackManel MontesinosОценок пока нет
- Grid Computing IT1012 CS1018Документ7 страницGrid Computing IT1012 CS1018Anoop CHОценок пока нет
- Industrial Gear Units For Conveyor Belts and Bucket ElevatorsДокумент16 страницIndustrial Gear Units For Conveyor Belts and Bucket ElevatorsAnıl YavuzОценок пока нет
- Java Full Stack Interview QuestionsДокумент5 страницJava Full Stack Interview QuestionsNaveen AlluriОценок пока нет
- Model Series 166 2011 - 06 - 002 - 004 - enДокумент104 страницыModel Series 166 2011 - 06 - 002 - 004 - enlartsim115100% (1)
- Session 3 - Track 7 - Wireless Charging PDFДокумент37 страницSession 3 - Track 7 - Wireless Charging PDFPraveen KumarОценок пока нет
- STS CompiledДокумент60 страницSTS CompiledAsi Cas JavОценок пока нет
- HIAB14000XGДокумент267 страницHIAB14000XGMigueОценок пока нет
- Infoblox Datasheet Bloxone DdiДокумент3 страницыInfoblox Datasheet Bloxone DdiSudhakar AruchamyОценок пока нет
- Sanog16 Mpls Transport SantanuДокумент75 страницSanog16 Mpls Transport Santanunambiar123Оценок пока нет