Вам также может понравиться
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Biomechanical Analysis of Punching Different Targets in Chinese Martial ArtsДокумент1 страницаBiomechanical Analysis of Punching Different Targets in Chinese Martial ArtsAnimesh GhoshОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Biomechanical Classification of Taekwondo Kicks: Figure 1: Graphical Representation of Three StyleДокумент2 страницыBiomechanical Classification of Taekwondo Kicks: Figure 1: Graphical Representation of Three StyleAnimesh GhoshОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Movement of The Jumping Front Kick. (Kan, 1991)Документ4 страницыThe Movement of The Jumping Front Kick. (Kan, 1991)Animesh GhoshОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- World's Largest Science, Technology & Medicine Open Access Book PublisherДокумент25 страницWorld's Largest Science, Technology & Medicine Open Access Book PublisherAnimesh GhoshОценок пока нет
- Biomechanical Analysis On Some Martial Art Aspects of Tai Chi ChuanДокумент1 страницаBiomechanical Analysis On Some Martial Art Aspects of Tai Chi ChuanAnimesh GhoshОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Kicking: Crossfit Journal Article Reprint. First Published in Crossfit Journal Issue 57 - May 2007Документ4 страницыKicking: Crossfit Journal Article Reprint. First Published in Crossfit Journal Issue 57 - May 2007Animesh Ghosh0% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- NI Tutorial 12953Документ4 страницыNI Tutorial 12953Animesh GhoshОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Digital Building Blocks: CS31 Pascal Van HentenryckДокумент29 страницDigital Building Blocks: CS31 Pascal Van HentenryckAnimesh GhoshОценок пока нет
- NI Tutorial 3536Документ6 страницNI Tutorial 3536Animesh GhoshОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- NI Tutorial 6480Документ4 страницыNI Tutorial 6480Animesh GhoshОценок пока нет
- An Introduction For Users and Manufacturers: Field Communication ProtocolДокумент12 страницAn Introduction For Users and Manufacturers: Field Communication ProtocolAnimesh GhoshОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Top 10 Tactics Every Street Smart Person KnowsДокумент6 страницThe Top 10 Tactics Every Street Smart Person KnowsAnimesh GhoshОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Fundamentals of Motion ControlДокумент7 страницFundamentals of Motion ControlAnimesh GhoshОценок пока нет
- Top 10 TacticsДокумент1 страницаTop 10 TacticsAnimesh GhoshОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- AC Capacitance and Capacitive ReactanceДокумент14 страницAC Capacitance and Capacitive ReactanceAnimesh GhoshОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Wei Kuen Do PDFДокумент7 страницWei Kuen Do PDFAnimesh Ghosh100% (1)
- 20121127130130a Beautiful Day PDFДокумент13 страниц20121127130130a Beautiful Day PDFAnimesh GhoshОценок пока нет
- en PDFДокумент20 страницen PDFIvan PlasenciaОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Answer The Following QuestionsДокумент8 страницAnswer The Following QuestionsKrishna SrivastavaОценок пока нет
- Safety Fact Sheet 8: Isolation TransformersДокумент2 страницыSafety Fact Sheet 8: Isolation TransformersKheireddine Aounallah100% (1)
- Empowerment TechnologyДокумент122 страницыEmpowerment TechnologyGen JamОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Ccna4 PresentationДокумент17 страницCcna4 PresentationDhiyauddin AriffinОценок пока нет
- Final Fantasy Viii For PC: ControlsДокумент2 страницыFinal Fantasy Viii For PC: ControlsEdimar SilvaОценок пока нет
- Jason Lai Acting Resume Online UseДокумент2 страницыJason Lai Acting Resume Online Useapi-276715756Оценок пока нет
- Ngo 1Документ15 страницNgo 1Gurjyot SinghОценок пока нет
- Full NotesДокумент114 страницFull NotesChethan KSwamyОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- IO Unit-ModelA-Connection and Maintenance ManualДокумент24 страницыIO Unit-ModelA-Connection and Maintenance ManualSebautomatismeОценок пока нет
- Rfid Based Attendance SystemДокумент89 страницRfid Based Attendance SystemSai shankerОценок пока нет
- Ask c95 ManualДокумент31 страницаAsk c95 ManualmigfrayaОценок пока нет
- CH-6 8086 Microprocessor InterfacingДокумент8 страницCH-6 8086 Microprocessor InterfacingAnikhet MulkyОценок пока нет
- Build A Render FarmДокумент4 страницыBuild A Render FarmstciaОценок пока нет
- Calrec Manual v2Документ11 страницCalrec Manual v2Hunter KillmanОценок пока нет
- Industrial TrainingДокумент14 страницIndustrial TrainingAbhay SharmaОценок пока нет
- 11 - Hand - Tool - Ebook PDFДокумент103 страницы11 - Hand - Tool - Ebook PDFtjiangОценок пока нет
- Laptop Condition ReportДокумент3 страницыLaptop Condition ReportAshok Kamath100% (1)
- RSP ManualДокумент15 страницRSP ManualAnonymous lp3gbdA1X7Оценок пока нет
- Tech Pack Downhole Memory CameraДокумент7 страницTech Pack Downhole Memory Cameraluis castroОценок пока нет
- DocДокумент2 страницыDoclijogkОценок пока нет
- Lesson PlanДокумент21 страницаLesson PlanRea Ann Autor LiraОценок пока нет
- Micromaster MM430 Drive ManualДокумент230 страницMicromaster MM430 Drive ManualSubhendu JanaОценок пока нет
- 1.0.5 Packet Tracer Logical and Physical Mode ExplorationДокумент4 страницы1.0.5 Packet Tracer Logical and Physical Mode ExplorationJimbo Baby GamingОценок пока нет
- ITE101 - Living in The IT Era - Week 1 2Документ10 страницITE101 - Living in The IT Era - Week 1 2Maybelle Bernal100% (1)
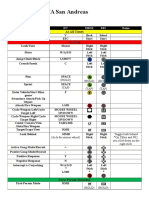
- Controls For GTA San AndreasДокумент3 страницыControls For GTA San AndreasMac AdhiОценок пока нет
- 01 Why Human Computer InteractionДокумент27 страниц01 Why Human Computer InteractionCloud StrifeОценок пока нет
- Atlantic Computer Case SolutionsДокумент4 страницыAtlantic Computer Case Solutionsamiref100% (1)
- CISCO Router Software - Configuration PDFДокумент408 страницCISCO Router Software - Configuration PDFasalihovicОценок пока нет
- AmanoNet Manual April 2012 PDFДокумент595 страницAmanoNet Manual April 2012 PDFThe UserОценок пока нет
- The Future of Geography: How the Competition in Space Will Change Our WorldОт EverandThe Future of Geography: How the Competition in Space Will Change Our WorldРейтинг: 4 из 5 звезд4/5 (6)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОт EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaОценок пока нет
- Hero Found: The Greatest POW Escape of the Vietnam WarОт EverandHero Found: The Greatest POW Escape of the Vietnam WarРейтинг: 4 из 5 звезд4/5 (19)