Вам также может понравиться
- Informe Partes de Arduino UnoДокумент6 страницInforme Partes de Arduino UnoEstefaОценок пока нет
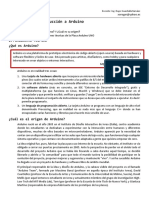
- Diagramas de Conexión: ¿Qué Es Arduino?Документ5 страницDiagramas de Conexión: ¿Qué Es Arduino?Arturo AvilaОценок пока нет
- JaDbDgY DLXtHjke YKRxXCFjpV BJJJQ Lectura 20 Fundamental 204Документ11 страницJaDbDgY DLXtHjke YKRxXCFjpV BJJJQ Lectura 20 Fundamental 204karol lopezОценок пока нет
- JaDbDgY DLXtHjke YKRxXCFjpV BJJJQ Lectura 20 Fundamental 204Документ11 страницJaDbDgY DLXtHjke YKRxXCFjpV BJJJQ Lectura 20 Fundamental 204karol lopezОценок пока нет
- Escenario 4 IOTДокумент11 страницEscenario 4 IOTALFONSO SERNAОценок пока нет
- Hsi Taller 4Документ15 страницHsi Taller 4EIEEОценок пока нет
- Taller de ArduinoДокумент51 страницаTaller de ArduinoManuel Alejandro MuñozОценок пока нет
- PIA SensoresДокумент140 страницPIA SensoresjesusОценок пока нет
- ArdynoДокумент12 страницArdynoBorja Lopez CabreraОценок пока нет
- Informe7 4815 SotomayorIvanna ZuritaVictorДокумент18 страницInforme7 4815 SotomayorIvanna ZuritaVictorEvelin HidalgoОценок пока нет
- ARDUINO InvestigaciónДокумент23 страницыARDUINO InvestigaciónSol Setnarod100% (3)
- Presentacion Plataforma ArduinoДокумент44 страницыPresentacion Plataforma ArduinoLaboratorio de Robótica Educativa UTN-FRTОценок пока нет
- Diseño de Un Sistema de Riego Por Goteo Controlado Por Arduino (Autoguardado)Документ19 страницDiseño de Un Sistema de Riego Por Goteo Controlado Por Arduino (Autoguardado)cristianОценок пока нет
- Arquitectura de La Placa ArduinoДокумент5 страницArquitectura de La Placa ArduinoELOISAОценок пока нет
- Taller de Arduino Básico Clase 1Документ44 страницыTaller de Arduino Básico Clase 1Alba Paola vitarОценок пока нет
- Arduino 1 DanandiazДокумент12 страницArduino 1 DanandiazDanan DiazОценок пока нет
- Practica ElectronicaДокумент15 страницPractica ElectronicaKevin EstradaОценок пока нет
- Actividad 9 Informe de LaboratorioДокумент9 страницActividad 9 Informe de LaboratoriokelvincabezasОценок пока нет
- Cap 3 EstudiosДокумент14 страницCap 3 EstudiosLenin LaglaОценок пока нет
- Arduino Salidas DigitalesДокумент12 страницArduino Salidas DigitalesErickОценок пока нет
- Que Es ArduinoДокумент10 страницQue Es ArduinoMario AlvaradoОценок пока нет
- Programación ARDUINOДокумент17 страницProgramación ARDUINOFlakita VianethОценок пока нет
- Arduino SДокумент6 страницArduino STodo FreeОценок пока нет
- Curso de ArduinoWordДокумент61 страницаCurso de ArduinoWorditzel5sosОценок пока нет
- x04. ARD AvanzadoMCircuitosДокумент244 страницыx04. ARD AvanzadoMCircuitosRicardo VelardiОценок пока нет
- P00 Introduccion A ArduinoДокумент7 страницP00 Introduccion A ArduinoMiguel ClarosОценок пока нет
- Placa de Desarrollo Arduino UNOДокумент2 страницыPlaca de Desarrollo Arduino UNOChristian TorresОценок пока нет
- Arduino IoTДокумент80 страницArduino IoTjose angelОценок пока нет
- Arduino UnoДокумент4 страницыArduino UnoJose Dirseu Lopez ReyesОценок пока нет
- Taller Super Basico de ArduinoДокумент15 страницTaller Super Basico de Arduinowilbert aguilarОценок пока нет
- Proyecto de Automotriz Analogico 11111111111Документ12 страницProyecto de Automotriz Analogico 11111111111Ismael AguilarОценок пока нет
- Marco Teórico ArduinoДокумент6 страницMarco Teórico ArduinoErick Joel Claudio100% (1)
- Componentes Tesis Cap 4Документ26 страницComponentes Tesis Cap 4Enmanuel NievesОценок пока нет
- ArduinoДокумент23 страницыArduinoFernando RecaldeОценок пока нет
- Practica 5 - Quinto Lopez JesusДокумент6 страницPractica 5 - Quinto Lopez JesusJESUS QUINTO LOPEZОценок пока нет
- Que Es ArduinoДокумент8 страницQue Es ArduinoMariela Lopez BonifazОценок пока нет
- Introduccion A La Programacion de Hardware AbiertoДокумент8 страницIntroduccion A La Programacion de Hardware AbiertoLeila Pérez TrujilloОценок пока нет
- Esquema Del Arduino UnoДокумент11 страницEsquema Del Arduino Unodaniel felipe sandovalОценок пока нет
- OrganizaciónДокумент91 страницаOrganizaciónbananaОценок пока нет
- EstructuraДокумент6 страницEstructurainsoramirezОценок пока нет
- Inteligencia ArtificialДокумент13 страницInteligencia ArtificialFrank ValienteОценок пока нет
- Lectura y Analisis de ArduinoДокумент9 страницLectura y Analisis de ArduinojoseОценок пока нет
- Reporte de Practica 2Документ15 страницReporte de Practica 2Alejandro PasozОценок пока нет
- Arduino UNOДокумент7 страницArduino UNOEduardo ZambranoОценок пока нет
- Microcontroladores ArduinoДокумент22 страницыMicrocontroladores ArduinoNestor Enrique Arriagada PadillaОценок пока нет
- Lengua MaternaДокумент35 страницLengua MaternaSergio Fernando Castro OrtizОценок пока нет
- Arduino Leonardo - Geeky TheoryДокумент10 страницArduino Leonardo - Geeky TheoryАндэрь ЗорьгОценок пока нет
- Arduino Caracteristica 3Документ7 страницArduino Caracteristica 3eriannysОценок пока нет
- El ArduinoДокумент10 страницEl ArduinoJovani TorresОценок пока нет
- ROBOTICAДокумент5 страницROBOTICAAXEL IRIARTEОценок пока нет
- Inbound 5545645465258358283Документ20 страницInbound 5545645465258358283Rudy Alexander Mamani VelaОценок пока нет
- Arduino PDFДокумент6 страницArduino PDFEduardo Lalo OlivaresОценок пока нет
- Actividad 1 Arduino CH340Документ16 страницActividad 1 Arduino CH340Luis Daniel Barraza MartinezОценок пока нет
- Informe Sobre ArduinoДокумент10 страницInforme Sobre ArduinoDiego Alonso Sanchez CipiranОценок пока нет
- Manual POP-BOT Es2Документ132 страницыManual POP-BOT Es2Victor Rubilar BobadillaОценок пока нет
- Proyecto ArduinoДокумент15 страницProyecto ArduinoMarthaОценок пока нет
- P05 Introduccion A ArduinoДокумент7 страницP05 Introduccion A Arduinooscar2 poma2Оценок пока нет
- Laboratorio 2 - Marco Teorico 1Документ9 страницLaboratorio 2 - Marco Teorico 1Eliana Yesica Belen BayoОценок пока нет
- Aprender Arduino, electrónica y programación con 100 ejercicios prácticosОт EverandAprender Arduino, electrónica y programación con 100 ejercicios prácticosРейтинг: 4.5 из 5 звезд4.5/5 (14)
- Aprender Arduino, prototipado y programación avanzada con 100 ejerciciosОт EverandAprender Arduino, prototipado y programación avanzada con 100 ejerciciosРейтинг: 5 из 5 звезд5/5 (5)
- Carta de Invitacion y Beneficio UniДокумент4 страницыCarta de Invitacion y Beneficio UniRoger CubasОценок пока нет
- PUNOДокумент170 страницPUNOdaveОценок пока нет
- Primera Prueba Aptitud Académica y Humanidades - Uni 2020 Ii Simulacro VirtualДокумент11 страницPrimera Prueba Aptitud Académica y Humanidades - Uni 2020 Ii Simulacro VirtualCesar Rojas Borda100% (1)
- PROPUESTAAДокумент57 страницPROPUESTAAlizОценок пока нет
- Carta de Compromiso Del EstudianteДокумент2 страницыCarta de Compromiso Del EstudianteRoger Cubas100% (1)
- Solucionario de 1ra Practica 2016 1 Cepre Uni PDFДокумент11 страницSolucionario de 1ra Practica 2016 1 Cepre Uni PDFRoger CubasОценок пока нет
- OpeДокумент24 страницыOpeRoger CubasОценок пока нет
- Forro de Molino SolidworksДокумент1 страницаForro de Molino SolidworksRoger CubasОценок пока нет
- Hidrometalurgia PDFДокумент99 страницHidrometalurgia PDFVictor Alonso67% (3)
- Tanque de Aire Comprimido Cubas 3 PCДокумент1 страницаTanque de Aire Comprimido Cubas 3 PCRoger CubasОценок пока нет
- Forro de Molino Vistas SolidworksДокумент1 страницаForro de Molino Vistas SolidworksRoger CubasОценок пока нет
- Aldehidos y CetonasДокумент25 страницAldehidos y Cetonasmarlu2424Оценок пока нет
- Forro de Molino Autocad 3dДокумент1 страницаForro de Molino Autocad 3dRoger CubasОценок пока нет
- FUNDIDORASДокумент1 страницаFUNDIDORASRoger CubasОценок пока нет
- Imforme de La OroyaДокумент12 страницImforme de La OroyaRoger CubasОценок пока нет
- Correccion Del Informe de CristaДокумент5 страницCorreccion Del Informe de CristaRoger CubasОценок пока нет
- OpeДокумент24 страницыOpeRoger CubasОценок пока нет
- ANEXO 3 Formatos Informe CAPSTONE Feria 19 LLДокумент8 страницANEXO 3 Formatos Informe CAPSTONE Feria 19 LLRoger CubasОценок пока нет
- Topografía Eléctrica - Cap8Документ6 страницTopografía Eléctrica - Cap8Roger CubasОценок пока нет
- Lista de Exposiciones 2019-2Документ4 страницыLista de Exposiciones 2019-2Roger CubasОценок пока нет
- ConminucionДокумент4 страницыConminucionRoger CubasОценок пока нет
- Slump CepreuniДокумент20 страницSlump Cepreuniluisunifc160567% (3)
- CyclosizerДокумент5 страницCyclosizerRoger CubasОценок пока нет
- Multimetro Conclusion ObservacionДокумент2 страницыMultimetro Conclusion ObservacionRoger CubasОценок пока нет
- Reconocimiento de Rocas y MineralesДокумент8 страницReconocimiento de Rocas y MineralesRoger CubasОценок пока нет
- CromatografiaДокумент8 страницCromatografiaAlexanderОценок пока нет
- ISOMETRIA CubasДокумент1 страницаISOMETRIA CubasRoger CubasОценок пока нет
- Preguntas Teoricas FUNDICIONДокумент2 страницыPreguntas Teoricas FUNDICIONRoger CubasОценок пока нет
- Parcial de Operaciones Unitarias 2018-2Документ4 страницыParcial de Operaciones Unitarias 2018-2Roger CubasОценок пока нет
- Bases de Fulbito Campeonato RelampagouvДокумент6 страницBases de Fulbito Campeonato RelampagouvRoger CubasОценок пока нет
- 48 Eje1 t1Документ13 страниц48 Eje1 t1qhsqfqtasghnbuОценок пока нет
- Automatización de Procesos Administrativos 1Документ22 страницыAutomatización de Procesos Administrativos 1ANDY SAM 10100% (2)
- Arquitectura de Los MicrocontroladoresДокумент15 страницArquitectura de Los MicrocontroladoresJoel RinconОценок пока нет
- Diagramas FanucДокумент52 страницыDiagramas Fanuchans_mad100% (4)
- Disposición de La Instalación EléctricaДокумент6 страницDisposición de La Instalación Eléctricaoskar50% (2)
- Microprocesador, Memoria RAM y Disco Duro, Requerimientos Básicos de Los Sistemas Operativos.Документ18 страницMicroprocesador, Memoria RAM y Disco Duro, Requerimientos Básicos de Los Sistemas Operativos.Yajaira Soledad Chipantiza FreireОценок пока нет
- FUNHD1303 Control2Документ7 страницFUNHD1303 Control2Jader Muñoz RamosОценок пока нет
- Sistema de Interconexion InternaДокумент32 страницыSistema de Interconexion InternaJosé Yelko Rojas LópezОценок пока нет
- Taller de Terminos y Tecnologias Utilizados en SistemasДокумент12 страницTaller de Terminos y Tecnologias Utilizados en SistemasDoris Arias SierraОценок пока нет
- CatálogoДокумент8 страницCatálogoBoris Fernando Criollo EncaladaОценок пока нет
- Practicas Con Proteus VSM PDFДокумент19 страницPracticas Con Proteus VSM PDFfercho573100% (1)
- G4212-95000 DAD User EbookДокумент254 страницыG4212-95000 DAD User EbookchiNkungОценок пока нет
- Apuntes de Informática y Comunicaciones 2016 PDFДокумент357 страницApuntes de Informática y Comunicaciones 2016 PDFbartolomeОценок пока нет
- Lin - Protocolos Del CAN BusДокумент16 страницLin - Protocolos Del CAN BusJuan vilchez sanchezОценок пока нет
- GFPI-F-019 - Formato - Guia - de - Aprendizaje - Memorias RAMДокумент7 страницGFPI-F-019 - Formato - Guia - de - Aprendizaje - Memorias RAMCesar Javier Barriga RodriguezОценок пока нет
- MICROCONTROLADORESДокумент69 страницMICROCONTROLADORESRafael VelazquezОценок пока нет
- ABEL ALEJANDRO JOSE AREVALO FUENTES - IC164ACI Trabajo FinalДокумент95 страницABEL ALEJANDRO JOSE AREVALO FUENTES - IC164ACI Trabajo Finalronald huancachoque arias0% (1)
- Manual MitsubishiДокумент94 страницыManual MitsubishicarlcoxОценок пока нет
- Estudio Del Microprocesador Nios IIДокумент17 страницEstudio Del Microprocesador Nios IIJorge Rodríguez Araújo100% (2)
- 2 RRHH 315 Pro Control Acceso Ver.02Документ15 страниц2 RRHH 315 Pro Control Acceso Ver.02Osvaldo Andres Sepulveda BavestrelloОценок пока нет
- Sistemas Cliente-ServidorДокумент78 страницSistemas Cliente-Servidorapi-261821691Оценок пока нет
- Esquemario2007es PDFДокумент24 страницыEsquemario2007es PDFMarcos R. Hernández M.67% (3)
- Ensayo Descriptivo de Von Neumann y HarvardДокумент2 страницыEnsayo Descriptivo de Von Neumann y Harvardandres david gonzalez betancourt50% (4)
- Y212 ES2 06+IndAutoSelection2016 PDFДокумент420 страницY212 ES2 06+IndAutoSelection2016 PDFCarlos Maldonado AlmeidaОценок пока нет
- Tipos de Cable de Conexión A Internet y Sus CaracterísticasДокумент27 страницTipos de Cable de Conexión A Internet y Sus CaracterísticasToño Chahua TaipeОценок пока нет
- Guia Practica Ensamblaje Pcs 2018 1Документ27 страницGuia Practica Ensamblaje Pcs 2018 1Gary Keith Ligarda AlejandroОценок пока нет
- Monografia Windows XPДокумент68 страницMonografia Windows XPMarco Antonio Puertas AguilarОценок пока нет
- CODIGOS ERROR C-4 160-200 Junio-2004Документ9 страницCODIGOS ERROR C-4 160-200 Junio-2004vitrinetecnicaОценок пока нет
- Laboratorio3 - Licitación KNX para Edificio de 8 PisosДокумент15 страницLaboratorio3 - Licitación KNX para Edificio de 8 PisosadrianОценок пока нет
- Introduccion A Los MicroprocesadoresДокумент44 страницыIntroduccion A Los Microprocesadoresmariocbr100% (1)