Вам также может понравиться
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОт EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsОценок пока нет
- High Precision Planetary Gearboxes: Apex Dynamics, IncДокумент6 страницHigh Precision Planetary Gearboxes: Apex Dynamics, IncR2m r2mОценок пока нет
- British Commercial Computer Digest: Pergamon Computer Data SeriesОт EverandBritish Commercial Computer Digest: Pergamon Computer Data SeriesОценок пока нет
- VODCДокумент2 страницыVODCVineet Maheshwari100% (1)
- RMD For EmaarДокумент61 страницаRMD For Emaaraliengineer953Оценок пока нет
- MONTABERTДокумент6 страницMONTABERTMiguelОценок пока нет
- Catalog 5Документ7 страницCatalog 5Ashirvad RathОценок пока нет
- 170M6812Документ2 страницы170M6812jesus marinОценок пока нет
- Approved Catalog - Duct M HT F400 2h - 2018!06!12Документ17 страницApproved Catalog - Duct M HT F400 2h - 2018!06!12Andrei DavidОценок пока нет
- WC67K EngДокумент8 страницWC67K Engclaudio ponceОценок пока нет
- 30 ACE AIR - Return Exhaust Fresh Air Grille (Model FL FB EG)Документ2 страницы30 ACE AIR - Return Exhaust Fresh Air Grille (Model FL FB EG)rndjafОценок пока нет
- Catalouge GTRДокумент2 страницыCatalouge GTRMr Nilesh ShahОценок пока нет
- Ballscrew Product Specifications 15 16Документ2 страницыBallscrew Product Specifications 15 16harryОценок пока нет
- Nomld: H 150+05DN (DN300toДокумент1 страницаNomld: H 150+05DN (DN300toAkshat JainОценок пока нет
- ParametersДокумент1 страницаParametersRolando BernalОценок пока нет
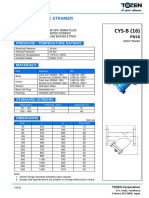
- Cast Iron Y Type Strainer SpecificationsДокумент1 страницаCast Iron Y Type Strainer SpecificationsAzwan SunlineОценок пока нет
- Catalogo Contactores ABBДокумент6 страницCatalogo Contactores ABBHéctor Eduardo Hernández LópezОценок пока нет
- 170M 6809Документ2 страницы170M 6809bernaОценок пока нет
- Pinbush - Tyre Coupling 2014Документ4 страницыPinbush - Tyre Coupling 2014Priyam NandwanaОценок пока нет
- Mitsubishi Magnetic - Contactors S-N150 DatasheetДокумент1 страницаMitsubishi Magnetic - Contactors S-N150 Datasheetjyl12Оценок пока нет
- Allowable Nozzle LoadsДокумент5 страницAllowable Nozzle LoadsPradeepaОценок пока нет
- Dresser Meters & Instruments Technical Data SheetДокумент3 страницыDresser Meters & Instruments Technical Data SheetronaldОценок пока нет
- UPS Cable Lengths - Tentative Calculations: Machine # Auto Cone Ring Card Drawing B Drawing F Unilap Comber SimplexДокумент4 страницыUPS Cable Lengths - Tentative Calculations: Machine # Auto Cone Ring Card Drawing B Drawing F Unilap Comber Simplexwaqasasad408Оценок пока нет
- Pipa Upvc PDFДокумент5 страницPipa Upvc PDFherdialjauziyahОценок пока нет
- Large Axial Fans: Dimensions (MM)Документ1 страницаLarge Axial Fans: Dimensions (MM)Pradeep JhaОценок пока нет
- DokumentacjaДокумент6 страницDokumentacjaPiotr SzaryОценок пока нет
- TWH N Torque Pressure Conversion Charts PDF273201693731Документ20 страницTWH N Torque Pressure Conversion Charts PDF273201693731Manohar SeetharamОценок пока нет
- FleetA Aug08 PDFДокумент3 страницыFleetA Aug08 PDFAlex BurcăОценок пока нет
- Catalogo Listino 2012 IngleseДокумент19 страницCatalogo Listino 2012 Inglesekaniappan sakthivelОценок пока нет
- Energy Efficient Single Phase Dual Capacitor Electric MotorДокумент2 страницыEnergy Efficient Single Phase Dual Capacitor Electric MotorVirender RanaОценок пока нет
- AVF-5000...Motorized Valve Series for HVAC Control SystemsДокумент6 страницAVF-5000...Motorized Valve Series for HVAC Control SystemsRendy MulyadiОценок пока нет
- PB Cast Iron HubsДокумент2 страницыPB Cast Iron Hubsabhijit287Оценок пока нет
- Activity Optimization TechniquesДокумент2 страницыActivity Optimization TechniquesAliezaОценок пока нет
- Nozzle Loading - EILДокумент5 страницNozzle Loading - EILSanthosh Dhinakaran P100% (1)
- AP EngДокумент34 страницыAP EngNail KayaОценок пока нет
- Axial Flow FansДокумент3 страницыAxial Flow FansABCDОценок пока нет
- PC Spun Piles Wika BetonДокумент8 страницPC Spun Piles Wika Betondennis rio perdanaОценок пока нет
- Pre Ops (Manual) THДокумент3 страницыPre Ops (Manual) THismanto31Оценок пока нет
- High-Pressure Fans, typeXP - BrochureДокумент4 страницыHigh-Pressure Fans, typeXP - BrochureAnonymous Cxriyx9HIXОценок пока нет
- AFK & AFQ-Series: Axial FanДокумент12 страницAFK & AFQ-Series: Axial FanAngga SenjayaОценок пока нет
- Pages From LVPED308005EN-4Документ7 страницPages From LVPED308005EN-4Ashirvad RathОценок пока нет
- 102 HCДокумент1 страница102 HCAkmalОценок пока нет
- Premium make comparison of bevel helical gearboxesДокумент3 страницыPremium make comparison of bevel helical gearboxesShyam J VyasОценок пока нет
- PBSD002 1 EN 0214 - ProductSheetДокумент2 страницыPBSD002 1 EN 0214 - ProductSheetdenisОценок пока нет
- Niza 2022 09 22 MBSA1523Документ7 страницNiza 2022 09 22 MBSA1523Mohd Abidi NoranizahОценок пока нет
- AVK Butterfly Valves Centric 820 - TAДокумент2 страницыAVK Butterfly Valves Centric 820 - TANam Nguyễn ĐứcОценок пока нет
- DESIGN OPTIMIZATIONДокумент35 страницDESIGN OPTIMIZATIONdasun1988Оценок пока нет
- Contactor Lovato CatalogoДокумент20 страницContactor Lovato CatalogopepeОценок пока нет
- WIKA PC Spun PilesДокумент2 страницыWIKA PC Spun PilesshgsuhermanОценок пока нет
- Storm Drainage - PVCДокумент1 страницаStorm Drainage - PVCMahmoud EldusokyОценок пока нет
- In-Line Fans Acoustic In-Line Fans AcqДокумент6 страницIn-Line Fans Acoustic In-Line Fans AcqkirmaniОценок пока нет
- Funeec Solid Carbide - Price ListДокумент12 страницFuneec Solid Carbide - Price ListdpshradhaОценок пока нет
- Contactors Motor Protection Accessories: Short Form CatalogueДокумент78 страницContactors Motor Protection Accessories: Short Form CatalogueFreddy Junior Arana HerreraОценок пока нет
- LE COUPLINGS FOR MACHINERYДокумент4 страницыLE COUPLINGS FOR MACHINERYSatОценок пока нет
- Coupling Catalog oДокумент3 страницыCoupling Catalog oGanesh KhandareОценок пока нет
- The Multitester or MultimeterДокумент49 страницThe Multitester or MultimeterJanice BlancoОценок пока нет
- Catalog 4Документ7 страницCatalog 4Ashirvad RathОценок пока нет
- (A-12, A-13) Plan Armature AB Ploce +100 PDFДокумент14 страниц(A-12, A-13) Plan Armature AB Ploce +100 PDFVladan ĆirovićОценок пока нет
- (A-12, A-13) Plan Armature AB Ploce +100Документ14 страниц(A-12, A-13) Plan Armature AB Ploce +100Vladan ĆirovićОценок пока нет
- BIM & Green DesignДокумент2 страницыBIM & Green DesignIqtidar GulОценок пока нет
- Neural Networks For Process Monitoring, Control and Fault DetectionДокумент11 страницNeural Networks For Process Monitoring, Control and Fault DetectionIqtidar GulОценок пока нет
- Life Cycle AssessmentДокумент7 страницLife Cycle AssessmentIqtidar GulОценок пока нет
- BREEAMДокумент4 страницыBREEAMIqtidar GulОценок пока нет
- Eamm-A enДокумент80 страницEamm-A enIqtidar GulОценок пока нет
- Eng & Winter, 1995 PDFДокумент6 страницEng & Winter, 1995 PDFIqtidar GulОценок пока нет
- Photo Guidelines - Department of Foreign Affairs and TradeДокумент11 страницPhoto Guidelines - Department of Foreign Affairs and TradeIqtidar GulОценок пока нет
- Circular Plate With Stiffners PDFДокумент37 страницCircular Plate With Stiffners PDFAnandОценок пока нет
- Bending Analysis of Circular Plates Using CPT and ANSYSДокумент7 страницBending Analysis of Circular Plates Using CPT and ANSYSelnielОценок пока нет
- Predictive Model For Porosity in Powder-Bed Fusion Additive ManufacturingДокумент6 страницPredictive Model For Porosity in Powder-Bed Fusion Additive ManufacturingIqtidar GulОценок пока нет
- Organizational Culture Drives Ethical BehaviorДокумент17 страницOrganizational Culture Drives Ethical BehaviorIqtidar GulОценок пока нет
- AIAA-2001-1162 Reduction of Tunnel Dynamics at The National Transonic Facility (Invited)Документ14 страницAIAA-2001-1162 Reduction of Tunnel Dynamics at The National Transonic Facility (Invited)Iqtidar GulОценок пока нет
- Nadeau Et Al., 2003 PDFДокумент10 страницNadeau Et Al., 2003 PDFIqtidar GulОценок пока нет
- Neural Networks For Process Monitoring, Control and Fault Detection PDFДокумент6 страницNeural Networks For Process Monitoring, Control and Fault Detection PDFIqtidar GulОценок пока нет
- Chapter 16 - Cranktrain - 2015-08-04 PDFДокумент64 страницыChapter 16 - Cranktrain - 2015-08-04 PDFbogodavidОценок пока нет
- Inspect and Machine Engine Crankshafts: Level 4 Credits 25 PurposeДокумент4 страницыInspect and Machine Engine Crankshafts: Level 4 Credits 25 PurposeIqtidar GulОценок пока нет
- CE Marking structural steelworkДокумент31 страницаCE Marking structural steelworkAliAkarОценок пока нет
- Surface Roughness Terminology and Parameters PDFДокумент2 страницыSurface Roughness Terminology and Parameters PDFErnesto GuevaraОценок пока нет
- Surface Roughness Conversion ChartДокумент1 страницаSurface Roughness Conversion ChartAnonymous LtbsU1zОценок пока нет
- MP Avt 284 06Документ18 страницMP Avt 284 06Iqtidar GulОценок пока нет
- Scholarship App Form Classes Prep XIIДокумент2 страницыScholarship App Form Classes Prep XIIIqtidar GulОценок пока нет
- Application Form Talent Hunt ScholarshipДокумент3 страницыApplication Form Talent Hunt ScholarshipOwais BilallОценок пока нет
- Putri KartikaДокумент17 страницPutri KartikaRamotSilabanОценок пока нет
- 14 - Hydraulic Design of Urban Drainage Systems PDFДокумент45 страниц14 - Hydraulic Design of Urban Drainage Systems PDFDeprizon SyamsunurОценок пока нет
- Sci7 Q1 Wk-5 Module-5Документ15 страницSci7 Q1 Wk-5 Module-5Lester Noel RosalesОценок пока нет
- B+V ELEVATOR SIDE DOOR Collar Type VS09 A4Документ19 страницB+V ELEVATOR SIDE DOOR Collar Type VS09 A4Игорь ШиренинОценок пока нет
- Export - Import Cycle - PPSXДокумент15 страницExport - Import Cycle - PPSXMohammed IkramaliОценок пока нет
- Working With Session ParametersДокумент10 страницWorking With Session ParametersyprajuОценок пока нет
- Influence of Social Media on Youth Brand Choice in IndiaДокумент7 страницInfluence of Social Media on Youth Brand Choice in IndiaSukashiny Sandran LeeОценок пока нет
- Assignment 2: Lesson Plan Analysis, Revision and Justification - Kaitlin Rose TrojkoДокумент9 страницAssignment 2: Lesson Plan Analysis, Revision and Justification - Kaitlin Rose Trojkoapi-408336810Оценок пока нет
- CM Template For Flora and FaunaДокумент3 страницыCM Template For Flora and FaunaJonathan Renier Verzosa0% (1)
- Drupal 8 User GuideДокумент224 страницыDrupal 8 User Guideibrail5Оценок пока нет
- Amex Case StudyДокумент12 страницAmex Case StudyNitesh JainОценок пока нет
- Gas Chromatography - COLIN F. POOLE 2012 PDFДокумент743 страницыGas Chromatography - COLIN F. POOLE 2012 PDFVo Manh Tien100% (1)
- Machine Tools Cutting FluidsДокумент133 страницыMachine Tools Cutting FluidsDamodara MadhukarОценок пока нет
- DMDPrework QuizДокумент5 страницDMDPrework Quizjunpe- yuutoОценок пока нет
- An Improved Ant Colony Algorithm and Its ApplicatiДокумент10 страницAn Improved Ant Colony Algorithm and Its ApplicatiI n T e R e Y eОценок пока нет
- BWT Septron Line 31-61 Rev01!08!05-18 Opm enДокумент56 страницBWT Septron Line 31-61 Rev01!08!05-18 Opm enDavide Grioni100% (1)
- Imp RssДокумент8 страницImp RssPriya SharmaОценок пока нет
- FRABA - Absolute - Encoder / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksДокумент3 страницыFRABA - Absolute - Encoder / PLC - 1 (CPU 314C-2 PN/DP) / Program BlocksAhmed YacoubОценок пока нет
- Module 5 Communication & Change MGT - HS Planning & Policy Making ToolkitДокумент62 страницыModule 5 Communication & Change MGT - HS Planning & Policy Making ToolkitKristine De Luna TomananОценок пока нет
- Siemens MS 42.0 Engine Control System GuideДокумент56 страницSiemens MS 42.0 Engine Control System GuideIbnu NugroОценок пока нет
- Marriage Gift PolicyДокумент4 страницыMarriage Gift PolicyGanesh Gaikwad100% (3)
- 2.5L ENGINE Chevy Tracker 1999Документ580 страниц2.5L ENGINE Chevy Tracker 1999andres german romeroОценок пока нет
- Country Profile - NigerДокумент1 страницаCountry Profile - Nigernana kayОценок пока нет
- Shell Omala S2 G150 DatasheetДокумент3 страницыShell Omala S2 G150 Datasheetphankhoa83-1Оценок пока нет
- Minimum Fees To Be Taken by CAДокумент8 страницMinimum Fees To Be Taken by CACA Sanjay BhatiaОценок пока нет
- Basics of Duct DesignДокумент2 страницыBasics of Duct DesignRiza BahrullohОценок пока нет
- Cost Systems: TermsДокумент19 страницCost Systems: TermsJames BarzoОценок пока нет
- 001 Gace Early Childhood TestДокумент3 страницы001 Gace Early Childhood Testapi-265795386Оценок пока нет
- 2020 - Audcap1 - 2.3 RCCM - BunagДокумент1 страница2020 - Audcap1 - 2.3 RCCM - BunagSherilyn BunagОценок пока нет
- Publications FireSafetyDesign SДокумент369 страницPublications FireSafetyDesign SJayachandra Reddy AnnavaramОценок пока нет
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОт EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveОценок пока нет
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityОт EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityРейтинг: 5 из 5 звезд5/5 (1)
- Generative AI: The Insights You Need from Harvard Business ReviewОт EverandGenerative AI: The Insights You Need from Harvard Business ReviewРейтинг: 4.5 из 5 звезд4.5/5 (2)
- The Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumОт EverandThe Infinite Machine: How an Army of Crypto-Hackers Is Building the Next Internet with EthereumРейтинг: 3 из 5 звезд3/5 (12)
- An Ugly Truth: Inside Facebook's Battle for DominationОт EverandAn Ugly Truth: Inside Facebook's Battle for DominationРейтинг: 4 из 5 звезд4/5 (33)
- Algorithms to Live By: The Computer Science of Human DecisionsОт EverandAlgorithms to Live By: The Computer Science of Human DecisionsРейтинг: 4.5 из 5 звезд4.5/5 (722)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyОт EverandChip War: The Quest to Dominate the World's Most Critical TechnologyРейтинг: 4.5 из 5 звезд4.5/5 (227)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldОт EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (54)
- Dealers of Lightning: Xerox PARC and the Dawn of the Computer AgeОт EverandDealers of Lightning: Xerox PARC and the Dawn of the Computer AgeРейтинг: 4 из 5 звезд4/5 (88)
- AI Superpowers: China, Silicon Valley, and the New World OrderОт EverandAI Superpowers: China, Silicon Valley, and the New World OrderРейтинг: 4.5 из 5 звезд4.5/5 (398)
- The Future of Geography: How the Competition in Space Will Change Our WorldОт EverandThe Future of Geography: How the Competition in Space Will Change Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (4)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОт EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessОценок пока нет
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseОт EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseРейтинг: 3.5 из 5 звезд3.5/5 (12)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideОт EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideРейтинг: 5 из 5 звезд5/5 (2)
- 8-Bit Apocalypse: The Untold Story of Atari's Missile CommandОт Everand8-Bit Apocalypse: The Untold Story of Atari's Missile CommandРейтинг: 3.5 из 5 звезд3.5/5 (10)
- The Mushroom at the End of the World: On the Possibility of Life in Capitalist RuinsОт EverandThe Mushroom at the End of the World: On the Possibility of Life in Capitalist RuinsРейтинг: 4 из 5 звезд4/5 (139)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansОт EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansОценок пока нет
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОт EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindОценок пока нет
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldОт EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldРейтинг: 4.5 из 5 звезд4.5/5 (107)
- Inventor of the Future: The Visionary Life of Buckminster FullerОт EverandInventor of the Future: The Visionary Life of Buckminster FullerРейтинг: 4 из 5 звезд4/5 (10)
- 97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersОт Everand97 Principles for Software Architects: Axioms for software architecture and development written by industry practitionersРейтинг: 5 из 5 звезд5/5 (21)
- Blood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeОт EverandBlood, Sweat, and Pixels: The Triumphant, Turbulent Stories Behind How Video Games Are MadeРейтинг: 4.5 из 5 звезд4.5/5 (335)