Вам также может понравиться
- PrimeMover en LRДокумент12 страницPrimeMover en LRCarlosОценок пока нет
- Tea Research - Harvester - Module No. 3 PLUCKINGДокумент47 страницTea Research - Harvester - Module No. 3 PLUCKINGCarlosОценок пока нет
- SB 100 Eriez Plate MagnetДокумент8 страницSB 100 Eriez Plate MagnetSuyapa Lainez LainezОценок пока нет
- Blower TruckДокумент2 страницыBlower TruckCarlosОценок пока нет
- Soil Under Control TrafficДокумент13 страницSoil Under Control TrafficCarlosОценок пока нет
- Specifications Model 32000 Series Transmission: Spicer Off-Highway ProductsДокумент2 страницыSpecifications Model 32000 Series Transmission: Spicer Off-Highway ProductsCarlosОценок пока нет
- Compresor A Diafragma CurvaДокумент1 страницаCompresor A Diafragma CurvaCarlosОценок пока нет
- Ds 47963Документ1 страницаDs 47963CarlosОценок пока нет
- Lennox AirHandler BrochureДокумент6 страницLennox AirHandler BrochureCarlosОценок пока нет
- Air - Understanding Fan Curves PDFДокумент4 страницыAir - Understanding Fan Curves PDFCarlos100% (1)
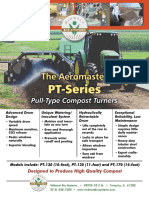
- Aeromaster PT Series Compost TurnersДокумент2 страницыAeromaster PT Series Compost TurnersCarlosОценок пока нет
- Ds 47592Документ1 страницаDs 47592CarlosОценок пока нет
- Ceramic Honeycombs: Inspection GuideДокумент5 страницCeramic Honeycombs: Inspection GuideCarlosОценок пока нет
- ASAE S217.12 DEC01 (ISO+730-1:1994) Three-Point Free-Link Attachment for Hitching Implements to Agricultural Wheel TractorsДокумент10 страницASAE S217.12 DEC01 (ISO+730-1:1994) Three-Point Free-Link Attachment for Hitching Implements to Agricultural Wheel TractorsCarlosОценок пока нет
- ASTM A106 Seamless Carbon Steel PipeДокумент2 страницыASTM A106 Seamless Carbon Steel PipeCarlosОценок пока нет
- Isulating Brick High TempДокумент2 страницыIsulating Brick High TempCarlosОценок пока нет
- Logical Troubleshooting in Hydraulic SystemsДокумент37 страницLogical Troubleshooting in Hydraulic Systemsg665013100% (18)
- Isulating Brick Low TempДокумент2 страницыIsulating Brick Low TempCarlosОценок пока нет
- Bronce Al Aluminio - ASTM B150Документ5 страницBronce Al Aluminio - ASTM B150CarlosОценок пока нет
- Bowex Bowex Fle-Pa Bowex-Elastic Monolastic Pump Mounting FlangesДокумент34 страницыBowex Bowex Fle-Pa Bowex-Elastic Monolastic Pump Mounting FlangesCarlosОценок пока нет
- Ceramic Honeycombs: For Regenerative Catalytic Oxidizer (RCO)Документ5 страницCeramic Honeycombs: For Regenerative Catalytic Oxidizer (RCO)CarlosОценок пока нет
- Ceramic Materials PropertiesДокумент1 страницаCeramic Materials PropertiesIntanasa NurdentiОценок пока нет
- 3 Puntos - CategoriasДокумент2 страницы3 Puntos - CategoriasCarlosОценок пока нет
- Hydraulic Fluid and LubricantsДокумент48 страницHydraulic Fluid and LubricantsCarlos100% (1)
- Ceramic Honeycombs for Regenerative Thermal Oxidizers (RTOДокумент5 страницCeramic Honeycombs for Regenerative Thermal Oxidizers (RTOCarlosОценок пока нет
- How To Repair Tire and Roller WearДокумент7 страницHow To Repair Tire and Roller WearzementheadОценок пока нет
- Design, Modeling and Control of Steering and Braking For An Urban Electric VehicleДокумент34 страницыDesign, Modeling and Control of Steering and Braking For An Urban Electric VehicleAmit SinghОценок пока нет
- Rotary Dryer HandbookДокумент34 страницыRotary Dryer Handbook11331490% (10)
- Steam - Sizing Condensate PipesДокумент4 страницыSteam - Sizing Condensate PipesCarlosОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Quadcopter Project Presentation Using KK 2.1.5 ControllerДокумент13 страницQuadcopter Project Presentation Using KK 2.1.5 ControllerAkshay SinghalОценок пока нет
- Catalogo Medesy 2011Документ133 страницыCatalogo Medesy 2011DentaDentОценок пока нет
- Herzien Verdrag Van ChaguaramasДокумент270 страницHerzien Verdrag Van ChaguaramasConsumentenbond SurinameОценок пока нет
- 2018 Bar Examinations Practical Exercises: Legal and Judicial Ethics andДокумент9 страниц2018 Bar Examinations Practical Exercises: Legal and Judicial Ethics andrfylananОценок пока нет
- Fundamental of ICT: Study PresentationДокумент12 страницFundamental of ICT: Study PresentationBikal ShresthaОценок пока нет
- Items in The Classroom: Words)Документ2 страницыItems in The Classroom: Words)Alan MartínezОценок пока нет
- Tkinter Cheat SheetДокумент2 страницыTkinter Cheat Sheetphanina01Оценок пока нет
- Drying of FVF - Volume 2Документ220 страницDrying of FVF - Volume 2JoelBerkaОценок пока нет
- DRDO recruitment for scientists in remote areasДокумент7 страницDRDO recruitment for scientists in remote areasselva mechОценок пока нет
- Gemstone MineralsДокумент8 страницGemstone MineralsRina Shane PascuaОценок пока нет
- Chapter 76 - Engine Controls: BHT-206L4-MM-9Документ22 страницыChapter 76 - Engine Controls: BHT-206L4-MM-9Raisa RabeyaОценок пока нет
- Soal B. Inggris Kelas Xii 2016 Nuruzam.Документ7 страницSoal B. Inggris Kelas Xii 2016 Nuruzam.osri rozaliОценок пока нет
- Introduction To Distributed SystemsДокумент5 страницIntroduction To Distributed SystemsoljiraaОценок пока нет
- Summary of Sales Report: Dranix Distributor IncДокумент6 страницSummary of Sales Report: Dranix Distributor Incshipmonk7Оценок пока нет
- Utah County Attorney Prioritized CrimesДокумент9 страницUtah County Attorney Prioritized CrimesThe Salt Lake TribuneОценок пока нет
- Facts: Issues: Held:: Eslao v. Comm. On Audit (GR No. 108310, Sept. 1, 1994)Документ4 страницыFacts: Issues: Held:: Eslao v. Comm. On Audit (GR No. 108310, Sept. 1, 1994)Stephen Celoso EscartinОценок пока нет
- MSS SP-79 2011Документ15 страницMSS SP-79 2011ISRAEL PORTILLO100% (1)
- Doa TradeДокумент17 страницDoa TradeEduardo WitonoОценок пока нет
- Sociology Ultra Concise Part 1Документ81 страницаSociology Ultra Concise Part 1Doulat GhumanОценок пока нет
- Skoda Yeti Brake Systems EngДокумент174 страницыSkoda Yeti Brake Systems EngJonattan Javier Ramirez BolañosОценок пока нет
- 12V 60Ah Lead Acid Battery Data SheetДокумент4 страницы12V 60Ah Lead Acid Battery Data SheetДима СелютинОценок пока нет
- (Studies in Critical Social Sciences) Elizabeth Humphrys - How Labour Built Neoliberalism (2018)Документ281 страница(Studies in Critical Social Sciences) Elizabeth Humphrys - How Labour Built Neoliberalism (2018)Angularity AngularityОценок пока нет
- STM Turbine Overspeed Failure Investigation-1Документ11 страницSTM Turbine Overspeed Failure Investigation-1Abdulrahman AlkhowaiterОценок пока нет
- 7 Principles of Highly Effective Command CentersДокумент11 страниц7 Principles of Highly Effective Command CentersLuis OlavarrietaОценок пока нет
- ATI CatalogДокумент84 страницыATI CatalogJimmy CrackKornОценок пока нет
- Kiambu Policy On Shipment ContainersДокумент12 страницKiambu Policy On Shipment Containersmusiomi2005Оценок пока нет
- Computer Skills For Page (50) - AboodalmsriДокумент112 страницComputer Skills For Page (50) - Aboodalmsribq4k2wgdjsОценок пока нет
- Lecture 3 Geological ContactsДокумент15 страницLecture 3 Geological ContactsEhtisham JavedОценок пока нет
- Tools and Techniques of Cost ReductionДокумент27 страницTools and Techniques of Cost Reductionপ্রিয়াঙ্কুর ধর100% (2)
- Bus. Plan Template EditedДокумент4 страницыBus. Plan Template EditedLovely magandaОценок пока нет