Вам также может понравиться
- Dual Channel PC Based Oscilloscope Project ReportДокумент35 страницDual Channel PC Based Oscilloscope Project ReportSaurabh Rathod100% (1)
- Compal Electronics schematic document analysisДокумент65 страницCompal Electronics schematic document analysisndd testiņšОценок пока нет
- Exercícios Extras (Em Inglês)Документ51 страницаExercícios Extras (Em Inglês)Rayner AugustoОценок пока нет
- ASK FSK PSK Simulation Using MultisimДокумент6 страницASK FSK PSK Simulation Using MultisimSabari Muthu RamanОценок пока нет
- Chapter 07 ISM PDFДокумент67 страницChapter 07 ISM PDFAhmedОценок пока нет
- DCOM Lab ManualДокумент38 страницDCOM Lab ManualGaurav Kalra0% (1)
- Mobile Radio Propagation ModelsДокумент5 страницMobile Radio Propagation ModelsFarEast RamdzanОценок пока нет
- MCQ Gate by RK KanodiaecДокумент440 страницMCQ Gate by RK KanodiaecViswakarma ChakravarthyОценок пока нет
- Analog Communication Lab ManualДокумент59 страницAnalog Communication Lab Manualsasa_sag100% (2)
- Dsplabmanual-By 22Документ64 страницыDsplabmanual-By 22debasnan singh100% (1)
- ECE Matlab DSP Proj. Titles Abstracts)Документ5 страницECE Matlab DSP Proj. Titles Abstracts)ACTS TECHNO SOLUTIONSОценок пока нет
- Digital Communication Systems OverviewДокумент51 страницаDigital Communication Systems OverviewDo Truong XuanОценок пока нет
- Libshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewДокумент16 страницLibshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewMartinAggroweОценок пока нет
- Cycle-I: Computer Communication Networks Lab Manual (18TE63), 2020-2021Документ77 страницCycle-I: Computer Communication Networks Lab Manual (18TE63), 2020-2021SHANTANU B SОценок пока нет
- Microwaves and Antennas Module 1 NotesДокумент16 страницMicrowaves and Antennas Module 1 NotesNikhilОценок пока нет
- Advanced DSPДокумент2 страницыAdvanced DSPAshar Wahid Hashmi50% (2)
- D.S.P/MATLAB Theory & ExperimentsДокумент57 страницD.S.P/MATLAB Theory & ExperimentsNandagopal Sivakumar50% (4)
- 1 Digital Signal Processing - IntroductionДокумент19 страниц1 Digital Signal Processing - IntroductionArifiana Satya NastitiОценок пока нет
- Lab Report Microwave EngineeringДокумент4 страницыLab Report Microwave EngineeringKarthi DuraisamyОценок пока нет
- Voice Recognition Using MATLABДокумент6 страницVoice Recognition Using MATLABWaseem BalochОценок пока нет
- Signal Coding and Estimation Theory PracticalДокумент11 страницSignal Coding and Estimation Theory Practicalrohit_vishwakarma786100% (2)
- UNIT I, II, III, IV, V Notes PDFДокумент93 страницыUNIT I, II, III, IV, V Notes PDFThiagu RajivОценок пока нет
- Ec - 501 - Microprocessor and Its ApplicationДокумент41 страницаEc - 501 - Microprocessor and Its ApplicationDr Nikita ShivhareОценок пока нет
- Course Work 1Документ9 страницCourse Work 1Mark FreemanОценок пока нет
- Lab 3.5.2 Challenge Frame Relay ConfigurationДокумент4 страницыLab 3.5.2 Challenge Frame Relay ConfigurationMark Zovighian0% (1)
- MATLAB codes for multiuser detectionДокумент10 страницMATLAB codes for multiuser detectionA SN ChakravarthyОценок пока нет
- 14ec2045 Spread Spectrum SystemsДокумент1 страница14ec2045 Spread Spectrum SystemsSugumar Sar DuraiОценок пока нет
- Simulation LaboratoryДокумент102 страницыSimulation LaboratoryPUBG ASSASIN தமிழ் ASASSINОценок пока нет
- Recent PHD ResultДокумент72 страницыRecent PHD ResultSavita Kiran BОценок пока нет
- Microwave Engineering Pozar Chapter 05 Exercise 09 PDFДокумент11 страницMicrowave Engineering Pozar Chapter 05 Exercise 09 PDFJohn Bofarull GuixОценок пока нет
- TT V2 - 1 TIMS AuДокумент4 страницыTT V2 - 1 TIMS AuVănThịnhОценок пока нет
- LIC Unit 3Документ25 страницLIC Unit 3mekalajesiОценок пока нет
- Dynamic Logic CircuitsДокумент38 страницDynamic Logic Circuitssreekanthreddy peramОценок пока нет
- Display DevicesДокумент78 страницDisplay DevicesSweta SipraОценок пока нет
- Optical and Microwave Lab Manual PDFДокумент33 страницыOptical and Microwave Lab Manual PDFAravindhan SaravananОценок пока нет
- 322 - EC8395 Communication Engineering - Notes PDFДокумент124 страницы322 - EC8395 Communication Engineering - Notes PDFAjitОценок пока нет
- Realization of Embedded Speech Recognmition Module Based On STM32Документ5 страницRealization of Embedded Speech Recognmition Module Based On STM32German Dario BuitragoОценок пока нет
- Matlab Routines for Subset Selection and Ridge Regression in Linear Neural NetworksДокумент46 страницMatlab Routines for Subset Selection and Ridge Regression in Linear Neural NetworksMAnan NanavatiОценок пока нет
- Ec 6511 Digital Signal Processing Lab ManualДокумент88 страницEc 6511 Digital Signal Processing Lab ManualSelva GanapathyОценок пока нет
- Pulse Code ModulationДокумент17 страницPulse Code Modulationعبدالله سعد محمدصالحОценок пока нет
- Basic SDR ImplementationДокумент27 страницBasic SDR Implementationsatishkumar123Оценок пока нет
- Digital and Analog Communication SystemsДокумент2 страницыDigital and Analog Communication SystemsEmir AnthonyОценок пока нет
- Ec 1401 Vlsi DesignДокумент2 страницыEc 1401 Vlsi DesignsubhazОценок пока нет
- Signal Processing and CommunicationsДокумент38 страницSignal Processing and CommunicationsoveiskntuОценок пока нет
- JNTUK M.Tech R13 CNC SyllabusДокумент18 страницJNTUK M.Tech R13 CNC Syllabuschakri474Оценок пока нет
- Digital Circuits For GATE ExamДокумент15 страницDigital Circuits For GATE ExamSAMIT KARMAKAR100% (1)
- BER For BPSK in Rayleigh ChannelДокумент50 страницBER For BPSK in Rayleigh Channelganga_ch1100% (2)
- En 50383-2010Документ80 страницEn 50383-2010hung311aОценок пока нет
- Digital Communication Lab: Internal Lab Exam-QuestionsДокумент4 страницыDigital Communication Lab: Internal Lab Exam-Questionsalwin9185Оценок пока нет
- 1 - Configuration Demo I PDFДокумент8 страниц1 - Configuration Demo I PDFPriyanka BeheraОценок пока нет
- MATLAB-ZF-LMSДокумент4 страницыMATLAB-ZF-LMSImmanuel VinothОценок пока нет
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryОт EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryОценок пока нет
- Electrical Overstress (EOS): Devices, Circuits and SystemsОт EverandElectrical Overstress (EOS): Devices, Circuits and SystemsОценок пока нет
- Understanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeОт EverandUnderstanding UMTS Radio Network Modelling, Planning and Automated Optimisation: Theory and PracticeMaciej NawrockiОценок пока нет
- Cross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionОт EverandCross-Layer Resource Allocation in Wireless Communications: Techniques and Models from PHY and MAC Layer InteractionОценок пока нет
- Emerging Technologies in Information and Communications TechnologyОт EverandEmerging Technologies in Information and Communications TechnologyОценок пока нет
- SD) Relay Settings CalculationsДокумент8 страницSD) Relay Settings CalculationsElectrical RadicalОценок пока нет
- Smps Mosfet: IRL3713 IRL3713S IRL3713LДокумент6 страницSmps Mosfet: IRL3713 IRL3713S IRL3713Laaa dddОценок пока нет
- Battery Chargers Data Sheet enUS 1895966475Документ3 страницыBattery Chargers Data Sheet enUS 1895966475Ahmed ShawkyОценок пока нет
- Capacitor Uf - NF - PF Conversion Chart PDFДокумент4 страницыCapacitor Uf - NF - PF Conversion Chart PDFRachel RowlandОценок пока нет
- Servo Weld Guns - VX TYPE: 2M MTBF 100% BodyshopДокумент2 страницыServo Weld Guns - VX TYPE: 2M MTBF 100% BodyshopLuciana LuОценок пока нет
- PHYSICS FORM 5 CHAPTER 1 WAVES AND ELECTRICITYДокумент4 страницыPHYSICS FORM 5 CHAPTER 1 WAVES AND ELECTRICITYsyeddnОценок пока нет
- Compact DX Training Manual PDFДокумент239 страницCompact DX Training Manual PDFChrisОценок пока нет
- Littelfuse Thyristor MAC228A D Datasheet PDFДокумент5 страницLittelfuse Thyristor MAC228A D Datasheet PDFHamid AbdОценок пока нет
- Matiz Manualll PDFДокумент37 страницMatiz Manualll PDFrafael alcantaraОценок пока нет
- 128 Lab 4Документ2 страницы128 Lab 4Eli QuerubinОценок пока нет
- Protection of Microgrid Through Coordinated Directional Over-Current RelaysДокумент6 страницProtection of Microgrid Through Coordinated Directional Over-Current RelaysChristos ApostolopoulosОценок пока нет
- EEE 101 - Lect23Документ12 страницEEE 101 - Lect23Basim AlthafОценок пока нет
- BGC-L Data Sheet 4921240306 UKДокумент5 страницBGC-L Data Sheet 4921240306 UKRafael Charry Andrade100% (1)
- ECE 321 Experiment 7 NMOS and PMOS Transistor CircuitsДокумент11 страницECE 321 Experiment 7 NMOS and PMOS Transistor CircuitsgrantdheilemanОценок пока нет
- Half & Full Wave Rectifier Circuits, Zener Diode Voltage Regulator ExperimentДокумент22 страницыHalf & Full Wave Rectifier Circuits, Zener Diode Voltage Regulator ExperimentHardik RangwaniОценок пока нет
- Manuale TV TCLДокумент17 страницManuale TV TCLilgamba93Оценок пока нет
- Mechatronic Trade - Professional Practice Judgment 2017 Ver. 1.4Документ12 страницMechatronic Trade - Professional Practice Judgment 2017 Ver. 1.4Daniel Ernesto EspitiaОценок пока нет
- Aiwa Cx-jds20 Cx-jds50 Ver1.1 SMДокумент69 страницAiwa Cx-jds20 Cx-jds50 Ver1.1 SMmientrasvivoОценок пока нет
- Philips - Accent LightingДокумент36 страницPhilips - Accent LightingrumahsketchОценок пока нет
- ANSI Device NumbersДокумент6 страницANSI Device Numbersicoviny0% (1)
- Performance Test of Bed Side Monitor: I.Alat Ukur Dan Bahan Yg DigunakanДокумент5 страницPerformance Test of Bed Side Monitor: I.Alat Ukur Dan Bahan Yg DigunakanFerry CahyantoОценок пока нет
- Presentation On Ion GunДокумент8 страницPresentation On Ion GunKoliОценок пока нет
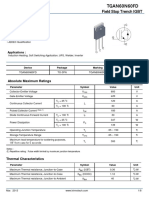
- Field Stop Trench IGBT: Absolute Maximum RatingsДокумент8 страницField Stop Trench IGBT: Absolute Maximum RatingsHeru susantoОценок пока нет
- ORBIKДокумент96 страницORBIKNizarОценок пока нет
- Voltage Shunt Feedback AmplifierДокумент4 страницыVoltage Shunt Feedback Amplifierersan turkmanОценок пока нет
- Instruction Manual: Dedicated Communication Unit RS-232C Output TypeДокумент4 страницыInstruction Manual: Dedicated Communication Unit RS-232C Output TypeM Farhan Al FananiОценок пока нет
- PSTX72-600-70 Softstarter Product DetailsДокумент4 страницыPSTX72-600-70 Softstarter Product DetailsRaul EirisОценок пока нет
- HD MechДокумент62 страницыHD MechSani UnanОценок пока нет
- PLC Upgrade Project DocumentationДокумент16 страницPLC Upgrade Project Documentationbhaskar112rkumarОценок пока нет
- ICL7135Документ16 страницICL7135JIGNESHОценок пока нет