Вам также может понравиться
- Apostila de RoboticaДокумент65 страницApostila de RoboticaVALDECIRDOMINGOSОценок пока нет
- Estratégias para facilitar a operação de braços robóticos em ambientes não-estruturadosОт EverandEstratégias para facilitar a operação de braços robóticos em ambientes não-estruturadosОценок пока нет
- Ementa Robotica Industrial 2014Документ2 страницыEmenta Robotica Industrial 2014Wellington de MattosОценок пока нет
- Livro - Artigo , Séries Idéias - Nanorrôbos,i.a, Em Máquinas AgriculasОт EverandLivro - Artigo , Séries Idéias - Nanorrôbos,i.a, Em Máquinas AgriculasОценок пока нет
- Livro Digital 255 Robótica Industrial Tema 3Документ8 страницLivro Digital 255 Robótica Industrial Tema 3LLuthy SouzaОценок пока нет
- Controle de Processos Industriais: Modelagem e Simulação com ScilabОт EverandControle de Processos Industriais: Modelagem e Simulação com ScilabРейтинг: 5 из 5 звезд5/5 (1)
- MSc12 - William - Cardozo - Motor de PassoДокумент140 страницMSc12 - William - Cardozo - Motor de PassoRoberto DiasОценок пока нет
- RelatorioCONTROLE FINAL PDFДокумент14 страницRelatorioCONTROLE FINAL PDFLuis Felipe SotoОценок пока нет
- Robótica Aula01Документ56 страницRobótica Aula01CLEBER HENRIQUE SILVA JÚNIORОценок пока нет
- Robotica Teoria e Pratica ROBOTICA TEORIДокумент173 страницыRobotica Teoria e Pratica ROBOTICA TEORIRafael SantosОценок пока нет
- Sistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesОт EverandSistema de Controle Fuzzy-Ótimo Aplicado ao Problema de Balanço Pendular da Carga em Pontes RolantesОценок пока нет
- Material de Robótica - Prof. MatheusДокумент50 страницMaterial de Robótica - Prof. MatheusProf Matheus Moreno (EuChegoLá)Оценок пока нет
- Ementa Sistemas de ControleДокумент4 страницыEmenta Sistemas de ControleAdailton FreitasОценок пока нет
- Mdi RobДокумент102 страницыMdi Robfabio fernandesОценок пока нет
- Robotic AДокумент1 страницаRobotic ADavid Augusto RibeiroОценок пока нет
- PCC Eng Mecatrônica-Robótica I-MECI.057Документ2 страницыPCC Eng Mecatrônica-Robótica I-MECI.057mootanhaОценок пока нет
- Velocidad y Aceleracion RV M1Документ11 страницVelocidad y Aceleracion RV M1BorregoRamirezОценок пока нет
- Robótica IndustrialДокумент93 страницыRobótica IndustrialFernando SoaresОценок пока нет
- Artigo ROBOTICAДокумент8 страницArtigo ROBOTICALuís Fernando StoccoОценок пока нет
- Artigo - AGV Manipulador RobóticoДокумент10 страницArtigo - AGV Manipulador RobóticoPedro Bruhmuller JuniorОценок пока нет
- Intro 2 RoboticsДокумент39 страницIntro 2 RoboticsLindalva BarrosОценок пока нет
- Estudo e Modelagem de Um Rob M Vel PDFДокумент15 страницEstudo e Modelagem de Um Rob M Vel PDFjose luis huayanay villarОценок пока нет
- Contribuição Ao Estudo Do Motor Síncrono de Relutância Com Gaiola 2002 DiscertaçãoДокумент148 страницContribuição Ao Estudo Do Motor Síncrono de Relutância Com Gaiola 2002 DiscertaçãoNickollas D'auriolОценок пока нет
- AulaAutomaoIndustrialRobtica 20161109120348 PDFДокумент108 страницAulaAutomaoIndustrialRobtica 20161109120348 PDFLory VianaОценок пока нет
- Ementa Sistemas RobotizadosДокумент3 страницыEmenta Sistemas RobotizadosFelipe SouzaОценок пока нет
- Automacao e Robotica Industrial Uma ReviДокумент12 страницAutomacao e Robotica Industrial Uma Revisebastiao miguel kinangaОценок пока нет
- Treinamento FUPAIДокумент7 страницTreinamento FUPAIIgor SerafimОценок пока нет
- Robôs ManipuladoresДокумент25 страницRobôs Manipuladoresdanieldcbueno100% (1)
- RB ApostilaДокумент95 страницRB ApostilaLuiz Carlos VidalОценок пока нет
- Apostila de RoboticaДокумент81 страницаApostila de RoboticaNando100% (3)
- Anatomia de Manipuladores RobóticosДокумент75 страницAnatomia de Manipuladores RobóticosThiago MaiaОценок пока нет
- Cálculo Explícito Dos Torques Dos Atuadores de Um Robô Paralelo Plano Empregando o Método de Kane - Gilson FinottiДокумент199 страницCálculo Explícito Dos Torques Dos Atuadores de Um Robô Paralelo Plano Empregando o Método de Kane - Gilson FinottiGilnei LoschОценок пока нет
- Robo AranhaДокумент158 страницRobo Aranhakala2011100% (1)
- Robótica (AT1 2 3)Документ79 страницRobótica (AT1 2 3)Tiago IzumisawaОценок пока нет
- Introducao Robotica 2Документ16 страницIntroducao Robotica 2Gabriel DechichiОценок пока нет
- Marcos Silva Tarefa2Документ14 страницMarcos Silva Tarefa2Marcos SilvaОценок пока нет
- Atividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoДокумент4 страницыAtividade 1 - Projeto Integrador de Competências em Ciência Da ComputaçãoaradilrpgОценок пока нет
- Matheus - Luiz - Wilhelm - 2020 - Mega Power BlasterДокумент132 страницыMatheus - Luiz - Wilhelm - 2020 - Mega Power BlasterRubens Eduardo MeloОценок пока нет
- AP Robótica Industrial (Mazaira)Документ74 страницыAP Robótica Industrial (Mazaira)Henrique MarkОценок пока нет
- RESUMO RoboticaДокумент2 страницыRESUMO RoboticaMarques Eugénio SamboОценок пока нет
- Trabalho Av2 1Документ6 страницTrabalho Av2 1Lincoln AlexandreОценок пока нет
- Aula2 - Descrição Espacial - TransformaçõesДокумент23 страницыAula2 - Descrição Espacial - TransformaçõesjocarliiОценок пока нет
- BL 10 - Prog. Automatizacao e Robotizacao em SoldagemДокумент4 страницыBL 10 - Prog. Automatizacao e Robotizacao em SoldagemLennike SantosОценок пока нет
- Introducao À RoboticaДокумент30 страницIntroducao À RoboticaMarcellus PinheiroОценок пока нет
- Material EstudoДокумент1 страницаMaterial EstudoRozinaldo silvaОценок пока нет
- ModeloResumoExpandido IICONTECH2022.2aa175738d194e98987cДокумент9 страницModeloResumoExpandido IICONTECH2022.2aa175738d194e98987cdamaris imuraОценок пока нет
- PLano Geral de Disciplina (PGD) - Eletrotécnica para Engenharia MecânicaДокумент2 страницыPLano Geral de Disciplina (PGD) - Eletrotécnica para Engenharia MecânicaRODRIGO MARTINS DE ARAUJOОценок пока нет
- Projeto de Controlador PI-PID Discretizados para Velocidade AngularДокумент8 страницProjeto de Controlador PI-PID Discretizados para Velocidade AngularThiago WerneckОценок пока нет
- Versão 1 RobóticaДокумент24 страницыVersão 1 RobóticaRodrigo IscuissatiОценок пока нет
- Pais Separados e FilhosДокумент13 страницPais Separados e FilhosBruna TalitaОценок пока нет
- 3466-Texto Do Artigo-8306-1-10-20130514 PDFДокумент18 страниц3466-Texto Do Artigo-8306-1-10-20130514 PDFLaís LopesОценок пока нет
- Teste - Atividade para Avaliação - Semana 3 Escola e CulturaДокумент3 страницыTeste - Atividade para Avaliação - Semana 3 Escola e CulturaGislaine MoraisОценок пока нет
- Língua Portuguesa 4º Ano Ensino Fundamental: (Nome Da Sua Escola) Componente Curricular: TurmaДокумент12 страницLíngua Portuguesa 4º Ano Ensino Fundamental: (Nome Da Sua Escola) Componente Curricular: TurmaViviane OliveiraОценок пока нет
- DNC Anos Iniciais PDFДокумент355 страницDNC Anos Iniciais PDFLetycia MedeirosОценок пока нет
- PNLD 2002 5 A 8 Sries Guia de Livros DidticosДокумент422 страницыPNLD 2002 5 A 8 Sries Guia de Livros DidticosaluiscgОценок пока нет
- Agnes Heller em PerspectivaДокумент150 страницAgnes Heller em PerspectivaRafael Fanni100% (3)
- QUESTIONARIO I Psicologia InterdisciplinarДокумент3 страницыQUESTIONARIO I Psicologia InterdisciplinarSISIОценок пока нет
- A Importância Do Controle de Autoridade: Uma Abordagem Baseada Nos Objetivos e Nas Funções Dos CatálogosДокумент15 страницA Importância Do Controle de Autoridade: Uma Abordagem Baseada Nos Objetivos e Nas Funções Dos CatálogosGEPCAT - Grupo de Estudos e Pesquisas em Catalogação100% (1)
- Correcao de TextosДокумент17 страницCorrecao de TextosCleunice AlmeidaОценок пока нет
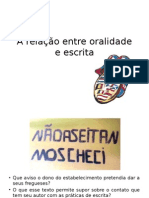
- A Relação Entre Oralidade e EscritaДокумент11 страницA Relação Entre Oralidade e EscritaJoão FelipeОценок пока нет
- Curso InglesДокумент84 страницыCurso InglesLuan CarlosОценок пока нет
- Bd46 Andragogia Um Novo Olhar Formacao DocenteДокумент13 страницBd46 Andragogia Um Novo Olhar Formacao DocenteRonilson PeixotoОценок пока нет
- Introdução À Teoria de Controle e Programação DinâmicaДокумент413 страницIntrodução À Teoria de Controle e Programação DinâmicaJames SilvaОценок пока нет
- Orientações de Comportamento EscolarДокумент23 страницыOrientações de Comportamento EscolarGabriela PontesОценок пока нет
- Univali - Universidade Do Vale Do Itajaí: Rev. Nufen: Phenom. InterdДокумент23 страницыUnivali - Universidade Do Vale Do Itajaí: Rev. Nufen: Phenom. InterdRhael PereiraОценок пока нет
- Práticas PedagogicasДокумент35 страницPráticas PedagogicasMacheu Madeira AgostinhoОценок пока нет
- PPC FilosofiaДокумент10 страницPPC FilosofiaMAYKON WILLIAM DA SILVA RODRIGUESОценок пока нет
- Ciencias Naturais 7anoДокумент1 страницаCiencias Naturais 7anoRita CatitaОценок пока нет
- Hannah Arendt e A Banalidade Do MalДокумент148 страницHannah Arendt e A Banalidade Do MalVanderlei Lima100% (1)
- ChanganaДокумент69 страницChanganamarianaluabo397850% (2)
- Príncipios Da Análise Do Comportamento Aplicada - O Que ÉДокумент31 страницаPríncipios Da Análise Do Comportamento Aplicada - O Que ÉLuciana MendesОценок пока нет
- DisciplinaridadeДокумент10 страницDisciplinaridadeVinicius100% (2)
- Tipos de Variação LingüísticaДокумент5 страницTipos de Variação LingüísticadalvabambilОценок пока нет
- Aula 3 Rec Sensoriais 2010-2Документ28 страницAula 3 Rec Sensoriais 2010-2Bia NunesОценок пока нет
- Roteiro Aliquest - Material Formativo. V4Документ64 страницыRoteiro Aliquest - Material Formativo. V4Ludmilla Silva FreitasОценок пока нет
- Questões de Fixação de Funções Sintáticas 16.09Документ2 страницыQuestões de Fixação de Funções Sintáticas 16.09anapauladesouzamello1982Оценок пока нет
- Didática Do Português Língua de Herança - CamõesДокумент5 страницDidática Do Português Língua de Herança - Camõesnefe_emeОценок пока нет
- EnglishДокумент100 страницEnglishWilliam DraxterОценок пока нет
- Concepções de Educação Infantil e Suas PossíveisДокумент11 страницConcepções de Educação Infantil e Suas PossíveisEdimar SartoroОценок пока нет
- Focar: Supere a procrastinação e aumente a força de vontade e a atençãoОт EverandFocar: Supere a procrastinação e aumente a força de vontade e a atençãoРейтинг: 4.5 из 5 звезд4.5/5 (53)
- Elaboração de programas de ensino: material autoinstrutivoОт EverandElaboração de programas de ensino: material autoinstrutivoОценок пока нет
- Técnicas Proibidas de Manipulação Mental e PersuasãoОт EverandTécnicas Proibidas de Manipulação Mental e PersuasãoРейтинг: 5 из 5 звезд5/5 (3)
- Psicologia sombria: Poderosas técnicas de controle mental e persuasãoОт EverandPsicologia sombria: Poderosas técnicas de controle mental e persuasãoРейтинг: 4 из 5 звезд4/5 (93)
- Técnicas De Terapia Cognitivo-comportamental (tcc)От EverandTécnicas De Terapia Cognitivo-comportamental (tcc)Оценок пока нет
- E-TRAP: entrevista diagnóstica para transtornos de personalidadeОт EverandE-TRAP: entrevista diagnóstica para transtornos de personalidadeРейтинг: 5 из 5 звезд5/5 (3)
- Encontre seu propósito: Como traçar um caminho em direção às suas paixões, fortalezas e autodescobertaОт EverandEncontre seu propósito: Como traçar um caminho em direção às suas paixões, fortalezas e autodescobertaРейтинг: 5 из 5 звезд5/5 (10)
- Intervenções Psicológicas para Promoção de Desenvolvimento e Saúde na Infância e AdolescênciaОт EverandIntervenções Psicológicas para Promoção de Desenvolvimento e Saúde na Infância e AdolescênciaРейтинг: 5 из 5 звезд5/5 (1)
- O psicólogo clínico em hospitais: Contribuição para o aperfeiçoamento da arte no BrasilОт EverandO psicólogo clínico em hospitais: Contribuição para o aperfeiçoamento da arte no BrasilОценок пока нет
- 35 Técnicas e Curiosidades Mentais: Porque a mente também deve evoluirОт Everand35 Técnicas e Curiosidades Mentais: Porque a mente também deve evoluirРейтинг: 5 из 5 звезд5/5 (3)
- Treinamento cerebral: Como funcionam a inteligência e o pensamento cognitivo (2 em 1)От EverandTreinamento cerebral: Como funcionam a inteligência e o pensamento cognitivo (2 em 1)Рейтинг: 4.5 из 5 звезд4.5/5 (29)
- Trading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaОт EverandTrading online de uma forma simples: Como aprender o comércio em linha e descobrir as bases para uma negociação bem sucedidaРейтинг: 5 из 5 звезд5/5 (1)
- Intervenções com foco na aprendizagem: Clínica e escolaОт EverandIntervenções com foco na aprendizagem: Clínica e escolaОценок пока нет
- Diálogo entre Terapia do Esquema e Terapia Focada na Compaixão: Contribuição à integração em Psicoterapias Cognitivo-ComportamentaisОт EverandDiálogo entre Terapia do Esquema e Terapia Focada na Compaixão: Contribuição à integração em Psicoterapias Cognitivo-ComportamentaisРейтинг: 5 из 5 звезд5/5 (1)
- Treinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisОт EverandTreinamento cerebral: Compreendendo inteligência emocional, atenção e muito maisРейтинг: 4.5 из 5 звезд4.5/5 (169)
- Medo da vida: Caminhos da realização pessoal pela vitória sobre o medoОт EverandMedo da vida: Caminhos da realização pessoal pela vitória sobre o medoОценок пока нет