Вам также может понравиться
- Programming A Fanuc Industrial Robot For Incremental Sheet FormingДокумент11 страницProgramming A Fanuc Industrial Robot For Incremental Sheet Forming501705016Оценок пока нет
- Delta Robot ThesisДокумент5 страницDelta Robot Thesisgj9vq5z0100% (2)
- Vessel Parametric Seat Modeling For Change Enhanced UsabilityДокумент4 страницыVessel Parametric Seat Modeling For Change Enhanced UsabilityIJERDОценок пока нет
- Labs-CIM Lab ManualДокумент48 страницLabs-CIM Lab ManualRicardoVillanuevaCabreraОценок пока нет
- Assem ManualДокумент33 страницыAssem ManualMenandro AmbanlocОценок пока нет
- Vehicle Class Recognition Using 3D CG Models: Shirmila Mohottala, Masataka Kagesawa, Katsushi IkeuchiДокумент10 страницVehicle Class Recognition Using 3D CG Models: Shirmila Mohottala, Masataka Kagesawa, Katsushi IkeuchiRami RomeoОценок пока нет
- Jefferson R. Medina BSME-2 Machine Shop Theory 1.G Code?Документ4 страницыJefferson R. Medina BSME-2 Machine Shop Theory 1.G Code?Jeff MedinaОценок пока нет
- RoboAnalyzerUserManual PDFДокумент22 страницыRoboAnalyzerUserManual PDFOscar AvilesОценок пока нет
- Experiment CNC and 3D - Uday Kumar PaliwalДокумент20 страницExperiment CNC and 3D - Uday Kumar PaliwalHarsh VatreОценок пока нет
- SUMO RobotДокумент20 страницSUMO RobotMatt's Santouz CchildОценок пока нет
- ROBOGUIDE (E) v07 PDFДокумент4 страницыROBOGUIDE (E) v07 PDFRUBENОценок пока нет
- Sem 2Документ33 страницыSem 2Pooja GОценок пока нет
- IESLCoE Robotics-Assignment - 2Документ11 страницIESLCoE Robotics-Assignment - 2kavish malakaОценок пока нет
- Lift 1Документ6 страницLift 1MICHEL RAJ MechОценок пока нет
- Static Structural Analysis of 4 Dof Telescopic Robotic ManipulatorДокумент6 страницStatic Structural Analysis of 4 Dof Telescopic Robotic Manipulatoralagar krishna kumarОценок пока нет
- Robot MillingДокумент20 страницRobot MillingGauravОценок пока нет
- PostToAgie - More InfoДокумент3 страницыPostToAgie - More InfoRONNIE SMITHОценок пока нет
- Design of Smart Car Using LabviewДокумент6 страницDesign of Smart Car Using LabviewSrinivas VeeruОценок пока нет
- Allegro Package Designer FlowsДокумент20 страницAllegro Package Designer FlowsAnonymous eNddb31Y100% (1)
- Pick and Place Robot Literature ReviewДокумент8 страницPick and Place Robot Literature Reviewnydohavihup2100% (1)
- Robotics LAB MANUAL MAEДокумент24 страницыRobotics LAB MANUAL MAEIsh Shilp100% (2)
- NX WAVE Control Structure TutorialДокумент31 страницаNX WAVE Control Structure TutorialTomas Lopez100% (1)
- Design Docment Smart Parking System: Ma'am Fakhra AftabДокумент13 страницDesign Docment Smart Parking System: Ma'am Fakhra AftabHaima NaqviОценок пока нет
- Design, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization SoftwareДокумент10 страницDesign, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization Softwareswag bucksОценок пока нет
- Conclusion, Discussions and Future WorkДокумент2 страницыConclusion, Discussions and Future WorkAung ThikeОценок пока нет
- Dynamic Analysis of Car Suspension Using ADAMSCarДокумент10 страницDynamic Analysis of Car Suspension Using ADAMSCarHussain TariqОценок пока нет
- Final Destination: A Computer Vision Guided Robotic SystemДокумент25 страницFinal Destination: A Computer Vision Guided Robotic SystemjitraycОценок пока нет
- Seat-Antisubmarine Performance SeatДокумент5 страницSeat-Antisubmarine Performance SeatKarthik IyerОценок пока нет
- Study and Analysis of Automotive Seating System Riser Design & Development For M1 Category VehicleДокумент8 страницStudy and Analysis of Automotive Seating System Riser Design & Development For M1 Category VehicleFabian BessonОценок пока нет
- Kine Record1Документ39 страницKine Record1Abdul AneesОценок пока нет
- Solidcam 5 Axis Tutorial: Volume 1 - BeginnerДокумент45 страницSolidcam 5 Axis Tutorial: Volume 1 - BeginnerReza VahdatparastОценок пока нет
- Cim ReportДокумент23 страницыCim ReportLuqman SuhaimeОценок пока нет
- Cim AqpДокумент7 страницCim AqpJeevanandam ShanmugasundaramОценок пока нет
- Automation and Robotics AssignmentДокумент13 страницAutomation and Robotics AssignmentMoHit LalОценок пока нет
- Manual de Uso de Chute MavenДокумент33 страницыManual de Uso de Chute MavenMiguel FarahОценок пока нет
- CADWorx Plant UserShapes Version 2013 FAQДокумент5 страницCADWorx Plant UserShapes Version 2013 FAQJimmy Alexander AvilaОценок пока нет
- Automatic Detection of Bike Riders Without Helmet: Under The Guidance of Mrs - Shanthi.E Submitted byДокумент31 страницаAutomatic Detection of Bike Riders Without Helmet: Under The Guidance of Mrs - Shanthi.E Submitted byShanthiОценок пока нет
- PortfolioДокумент36 страницPortfolioapi-438611633Оценок пока нет
- ROBOTICSДокумент99 страницROBOTICSRutuja ParabОценок пока нет
- AR - Module-2 Q & A (SEE)Документ7 страницAR - Module-2 Q & A (SEE)Simply AkashОценок пока нет
- Airflow Around An Ahmed Body ProjectДокумент5 страницAirflow Around An Ahmed Body ProjectSagar MehtaОценок пока нет
- Training Report ON Catia, Undertaken AT Gowra Aerospce Pvt. LTD., Medchal, AndhrapradeshДокумент8 страницTraining Report ON Catia, Undertaken AT Gowra Aerospce Pvt. LTD., Medchal, AndhrapradeshRohit K. LahareОценок пока нет
- Car Number Plate RecognitionДокумент87 страницCar Number Plate RecognitionSudheer Goud80% (5)
- CNC Machine Lab Report and Process PlannДокумент5 страницCNC Machine Lab Report and Process PlannMuhammad JahanzaibОценок пока нет
- Design, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization SoftwareДокумент11 страницDesign, Simulation, and Analysis of A 6-Axis Robot Using Robot Visualization SoftwareChristy PollyОценок пока нет
- PUMA Forward KinematicsДокумент11 страницPUMA Forward KinematicsNitin MeenaОценок пока нет
- Catia Questions & AnswersДокумент15 страницCatia Questions & AnswersShubham BhagwatОценок пока нет
- Bike Rental Management SystemДокумент22 страницыBike Rental Management SystemMukunthan MuthurajОценок пока нет
- Project ProposalДокумент10 страницProject ProposalMuhammad Ammar SohailОценок пока нет
- Intelligent Parallel Parking and Obstacle Avoidance System: Spring 2011 Senior Design ProjectДокумент5 страницIntelligent Parallel Parking and Obstacle Avoidance System: Spring 2011 Senior Design Projectnessma abosamraОценок пока нет
- Tm410 The Basics of AsimДокумент45 страницTm410 The Basics of AsimEdward ArmijoОценок пока нет
- ALPR PaperДокумент5 страницALPR PaperShweta SharmaОценок пока нет
- Presentation Pick and Place Robo Arm 3d PrintedДокумент16 страницPresentation Pick and Place Robo Arm 3d PrintedKshitij BandarОценок пока нет
- Universiti Teknikal Malaysia Melaka (Utem) : Faculty of Manufacturing EngineeringДокумент2 страницыUniversiti Teknikal Malaysia Melaka (Utem) : Faculty of Manufacturing EngineeringSyahmi HasanОценок пока нет
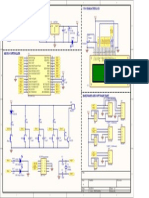
- LCD Display: Power Supply 2 16 Character LCDДокумент1 страницаLCD Display: Power Supply 2 16 Character LCDSyahmi Hasan100% (1)
- Traffic Measurement and Vehicle Classification With A Single Magnetic SensorДокумент23 страницыTraffic Measurement and Vehicle Classification With A Single Magnetic SensorSyahmi HasanОценок пока нет
- CHAP 2 Manufacturing OperationДокумент24 страницыCHAP 2 Manufacturing OperationSyahmi HasanОценок пока нет
- Proposal Engineer SocietyДокумент3 страницыProposal Engineer SocietySyahmi HasanОценок пока нет
- Pandit Deendayal Energy University School of Technology: 21BCP430D Pranjal M. PatelДокумент42 страницыPandit Deendayal Energy University School of Technology: 21BCP430D Pranjal M. PatelDevasya PatelОценок пока нет
- WK 3 PE 3032 TF Signal Flow Graphs Mason Ed0314Документ38 страницWK 3 PE 3032 TF Signal Flow Graphs Mason Ed0314gashawletaОценок пока нет
- Cyberark Skyark Data SheetДокумент2 страницыCyberark Skyark Data SheetSomashekar DharnappagoudarОценок пока нет
- Soliton and ParticleДокумент6 страницSoliton and ParticleIis YuliaОценок пока нет
- Pitney BowesДокумент15 страницPitney BowesPeter Sen Gupta100% (1)
- Sony SLV Ex5 Ex8s Ex9sДокумент71 страницаSony SLV Ex5 Ex8s Ex9svideoson100% (1)
- Computer Grade 7 Software ReviewДокумент46 страницComputer Grade 7 Software Reviewjeromee mendozaОценок пока нет
- Knowledge 1Документ1 страницаKnowledge 1benciusilviuОценок пока нет
- Automated Quality Inspection of Bottles Crates Through Image ProcessingДокумент17 страницAutomated Quality Inspection of Bottles Crates Through Image ProcessingnasnasОценок пока нет
- As 2282.8-1999 Methods For Testing Flexible Cellular Polyurethane Determination of Force DeflectionДокумент2 страницыAs 2282.8-1999 Methods For Testing Flexible Cellular Polyurethane Determination of Force DeflectionSAI Global - APACОценок пока нет
- DimensioningДокумент14 страницDimensioningpaulo_rieloffОценок пока нет
- Pa MetricsДокумент23 страницыPa MetricsMatt LambieОценок пока нет
- Final NiДокумент17 страницFinal NiAllysa D.R RemosОценок пока нет
- 18 Mat 112Документ2 страницы18 Mat 112ChintuОценок пока нет
- PP 90264 LIMS Integration Compliance ArabLab2017 PP90264 enДокумент25 страницPP 90264 LIMS Integration Compliance ArabLab2017 PP90264 enPaten PisanОценок пока нет
- Latitude 9p0 Datasheet USДокумент2 страницыLatitude 9p0 Datasheet USGuillermo IbarraОценок пока нет
- Crush Salary Week3.28-3.30Документ6 страницCrush Salary Week3.28-3.30Israel Leyson MillareОценок пока нет
- Brijesh Rai M-9811784242 E Mail: Brijeshrai1977@yahoo - Co.inДокумент3 страницыBrijesh Rai M-9811784242 E Mail: Brijeshrai1977@yahoo - Co.ininderОценок пока нет
- Macro Teste de ResistenciaДокумент1 страницаMacro Teste de ResistenciaFelipe MouraОценок пока нет
- Unit-4 OOSD NoteДокумент32 страницыUnit-4 OOSD Noterajputakshay8940Оценок пока нет
- Lec 5Документ23 страницыLec 5Sama Atif Abdel-LatifОценок пока нет
- GX1600 1600e SM Usa Exp Eu Em048n90dДокумент46 страницGX1600 1600e SM Usa Exp Eu Em048n90dJadi PurwonoОценок пока нет
- Current Sensor - LTSR 15-NPДокумент3 страницыCurrent Sensor - LTSR 15-NPFadhil Tresna NugrahaОценок пока нет
- Fundamentals of ANNДокумент213 страницFundamentals of ANNJosi MoОценок пока нет
- Course OutlineДокумент13 страницCourse OutlineRaffОценок пока нет
- IBM Analytics - Ladder To AIДокумент31 страницаIBM Analytics - Ladder To AIweeliyen5754Оценок пока нет
- Readme FpgaДокумент5 страницReadme Fpgabima saktiОценок пока нет
- MR Cain Richard Mann: Curriculum VitaeДокумент4 страницыMR Cain Richard Mann: Curriculum VitaeDoni MuharomОценок пока нет
- EEG Amplifier Development BoardДокумент27 страницEEG Amplifier Development BoardHaseeb Ur RehmanОценок пока нет