Вам также может понравиться
- Open Loop Closed LoopДокумент12 страницOpen Loop Closed LoopKarthik RamОценок пока нет
- UGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessДокумент13 страницUGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessJitlee PapaОценок пока нет
- Chemical Reaction EngineeringДокумент93 страницыChemical Reaction EngineeringGuru Raj BhattОценок пока нет
- FeedCon (Unit 3)Документ39 страницFeedCon (Unit 3)engrwhoОценок пока нет
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11От EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Оценок пока нет
- Control SystemДокумент11 страницControl Systembalaji1986Оценок пока нет
- Finals FeedbasackДокумент4 страницыFinals FeedbasackVenus MadridОценок пока нет
- Time ResponseДокумент71 страницаTime ResponsejuniorwantopaletekanОценок пока нет
- Control System 2MARKSДокумент16 страницControl System 2MARKSSeekay Alais Karuppaiah CОценок пока нет
- Dept of Aero: Unit I-Introduction PART - A (2 Marks)Документ9 страницDept of Aero: Unit I-Introduction PART - A (2 Marks)DeepakLingamoorthyОценок пока нет
- Control System Short Answer Type QuestionsДокумент1 страницаControl System Short Answer Type QuestionsAlka GoyalОценок пока нет
- Control Systems (1-135) PDFДокумент128 страницControl Systems (1-135) PDFAnonymous huaIYe1Оценок пока нет
- Study Linear System SimulatorДокумент6 страницStudy Linear System SimulatorVats AlokОценок пока нет
- Control System Engineering Lab: Avanish Niranjan 17104088 EEN 210Документ17 страницControl System Engineering Lab: Avanish Niranjan 17104088 EEN 210Umang SoinОценок пока нет
- 191ECC302T CSE 2 Marks With Answer-2022Документ14 страниц191ECC302T CSE 2 Marks With Answer-2022Senthilkumar PandianОценок пока нет
- Control Engineering Question BankДокумент9 страницControl Engineering Question Banksathesh waranОценок пока нет
- Control Systems: Basil HamedДокумент71 страницаControl Systems: Basil Hamedkhaled jОценок пока нет
- Q1: Put The Sign For Right Sentences and The Sign X For Wrong SentencesДокумент18 страницQ1: Put The Sign For Right Sentences and The Sign X For Wrong SentencesWaleed HåšhįmОценок пока нет
- Time Response Analysis of SystemДокумент2 страницыTime Response Analysis of SystemJames Lee IlaganОценок пока нет
- Automated Control Unit III Part 1,2Документ13 страницAutomated Control Unit III Part 1,2Rakgnar LodbrokОценок пока нет
- First Order and Second Order Control SystemsДокумент39 страницFirst Order and Second Order Control SystemsYahya MateenОценок пока нет
- Control System Engineering 2 MarksДокумент18 страницControl System Engineering 2 MarksSeenu CnuОценок пока нет
- Experiment No 1 Analysis of Control System ParametersДокумент6 страницExperiment No 1 Analysis of Control System Parameterspratik KumarОценок пока нет
- Modeling and Time Response AnalysisДокумент29 страницModeling and Time Response AnalysisPrabhavathi AadhiОценок пока нет
- Simulink Basics TutorialДокумент143 страницыSimulink Basics TutorialHiếu HuỳnhОценок пока нет
- Machine Control SystemsДокумент9 страницMachine Control SystemsHisham SyedОценок пока нет
- Control Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiДокумент27 страницControl Engineering ME - 4012: Instructor Muhammad Rizwan SiddiquiTalha JalilОценок пока нет
- Week 7A - Online Classes - S2020Документ16 страницWeek 7A - Online Classes - S2020Muhammad Tayyab YousafzaiОценок пока нет
- Lab - 06 56Документ23 страницыLab - 06 56MEEN201101056 KFUEITОценок пока нет
- EEN-305 Advanced Control Systems Lab ReportДокумент16 страницEEN-305 Advanced Control Systems Lab ReportRitik MathurОценок пока нет
- Control System Fundamental: Time Response AnalysisДокумент77 страницControl System Fundamental: Time Response Analysisoneisa92100% (1)
- Second Order SystemДокумент11 страницSecond Order SystemSaravanan SukumaranОценок пока нет
- Dynamic Responses of SystemsДокумент68 страницDynamic Responses of Systemsgiriaj kokareОценок пока нет
- CS Two MarksДокумент7 страницCS Two MarkssivaeinfoОценок пока нет
- Control Systems: SyllabusДокумент259 страницControl Systems: SyllabusManit BansalОценок пока нет
- Mcqs On Control SystemДокумент59 страницMcqs On Control SystemAmeen UllahОценок пока нет
- Control Systems (1-135)Документ128 страницControl Systems (1-135)K.Sushita VISTASОценок пока нет
- IV Semester EED Time Response Analysis Transfer FunctionsДокумент4 страницыIV Semester EED Time Response Analysis Transfer FunctionsNitin GoyalОценок пока нет
- First Systems Tcm18 190087Документ5 страницFirst Systems Tcm18 190087HyeSooОценок пока нет
- Control QuestionsДокумент6 страницControl Questionshksaifee0% (1)
- Lab6 - System Analysis (2) - 14-05-2018Документ31 страницаLab6 - System Analysis (2) - 14-05-2018Eng. Ibrahim Abdullah AlruhmiОценок пока нет
- EE2253 Control Systems Syllabus and QuestionsДокумент14 страницEE2253 Control Systems Syllabus and Questionsselvi0412100% (1)
- ME 34000 and ECE 34000 Instrumentation and Measurement SystemsДокумент21 страницаME 34000 and ECE 34000 Instrumentation and Measurement SystemsMamadou DemОценок пока нет
- Linear_Systems_Simulator_ELP225Документ7 страницLinear_Systems_Simulator_ELP225VipulОценок пока нет
- EEE342Документ3 страницыEEE342krishna135Оценок пока нет
- Control System Analysis Poles of A Transfer FunctionДокумент4 страницыControl System Analysis Poles of A Transfer FunctionRyan Kim PatronОценок пока нет
- EC2255 Controls Systems 2marks With Answers (Sem4)Документ39 страницEC2255 Controls Systems 2marks With Answers (Sem4)lvrevathiОценок пока нет
- Tutorial 5Документ2 страницыTutorial 5Gaurav AОценок пока нет
- Exp 1Документ33 страницыExp 1k4nishkkОценок пока нет
- 6 - Time Response Analysis 2Документ21 страница6 - Time Response Analysis 2حساب ويندوزОценок пока нет
- Linear Control System Lab Report#7 Response in MATLABДокумент12 страницLinear Control System Lab Report#7 Response in MATLABFatima SheikhОценок пока нет
- Navtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsДокумент24 страницыNavtej Mishra 19116043: Experiment - 1: Study of Linear-Time-Invariant Open-Loop Systems and Their RepresentationsNavtej MishraОценок пока нет
- 100 CSE 2 MarksДокумент10 страниц100 CSE 2 MarksdhanarajОценок пока нет
- 13-05-2021-CS - First Order - Ramp - ParabolicДокумент20 страниц13-05-2021-CS - First Order - Ramp - ParabolicKowstubha ChОценок пока нет
- Timeresp ME451 OldДокумент84 страницыTimeresp ME451 OldaliceОценок пока нет
- 58077-13950-IC1251 IV Sem Control System 2-MARKSДокумент15 страниц58077-13950-IC1251 IV Sem Control System 2-MARKSMarilyn PrascillaОценок пока нет
- Exp01 EEE318Документ7 страницExp01 EEE318Abid AbdullahОценок пока нет
- Classical Control 1 Sche A MeДокумент7 страницClassical Control 1 Sche A MeEric Leo AsiamahОценок пока нет
- Nonlinear Control Feedback Linearization Sliding Mode ControlОт EverandNonlinear Control Feedback Linearization Sliding Mode ControlОценок пока нет
- 4th-Qrtr-dll Gr.-9Документ29 страниц4th-Qrtr-dll Gr.-9harold carbonelОценок пока нет
- IB EXtended Essay-Modeling The Variation in Specific Heat of A 4'-Octyl-4-Biphenyl-Carbonitrile Liquid Crystal Due To Phase TransitionДокумент43 страницыIB EXtended Essay-Modeling The Variation in Specific Heat of A 4'-Octyl-4-Biphenyl-Carbonitrile Liquid Crystal Due To Phase TransitionAndrewОценок пока нет
- Benchmark ProblemsДокумент6 страницBenchmark ProblemsGiri DharanОценок пока нет
- Conductance ManualДокумент12 страницConductance ManualhannibalmrОценок пока нет
- Shell Element Forces StressesДокумент6 страницShell Element Forces Stressesmacarena menaОценок пока нет
- Rectilinear and rotational kinematics problemsДокумент5 страницRectilinear and rotational kinematics problemsAljay Dungao40% (5)
- Ce 6306 Som Part A AnswersДокумент21 страницаCe 6306 Som Part A Answersommech2020Оценок пока нет
- Heiser - Temperature Charts For Induction and Constant Temperature HeatingДокумент10 страницHeiser - Temperature Charts For Induction and Constant Temperature Heatingsharkdude1134Оценок пока нет
- GV240 Series: Advanced Switching SolutionsДокумент7 страницGV240 Series: Advanced Switching SolutionsBiagio PadulaОценок пока нет
- Maglev Wind Mill ReportДокумент24 страницыMaglev Wind Mill ReportBalu MahendarОценок пока нет
- Math 250B Lectures NotesДокумент146 страницMath 250B Lectures NotessaudehmadОценок пока нет
- Laboratory Stress-Strain Tests For Developments in Geotechnical Engineering Research and PracticeДокумент61 страницаLaboratory Stress-Strain Tests For Developments in Geotechnical Engineering Research and PracticeRami Mahmoud BakrОценок пока нет
- Ph501 Electrodynamics Problem Set 6: Princeton UniversityДокумент46 страницPh501 Electrodynamics Problem Set 6: Princeton UniversityEdgar RamirezОценок пока нет
- M2x2 2179enДокумент8 страницM2x2 2179enSerge RinaudoОценок пока нет
- Calibration Guide: The Art of MeasurementДокумент16 страницCalibration Guide: The Art of Measurementjrlr65Оценок пока нет
- XI. Turbomachinery: General ClassificationДокумент19 страницXI. Turbomachinery: General ClassificationAditya GargОценок пока нет
- Duct Sizing ChartДокумент3 страницыDuct Sizing ChartMonmon DelatorreОценок пока нет
- TE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSДокумент40 страницTE-2008-Chemical Pang Halimaw Na Exam Ang Hirap NG TanongSRomevie PradoОценок пока нет
- Some Applications of Quantum Mechanics PDFДокумент436 страницSome Applications of Quantum Mechanics PDFArif MamonОценок пока нет
- Ruta Al Caos PDFДокумент33 страницыRuta Al Caos PDFDiego VilchesОценок пока нет
- An Efficient, Two-Dimensional Implementation of The Ffowcs Williams and Hawkings EquationДокумент15 страницAn Efficient, Two-Dimensional Implementation of The Ffowcs Williams and Hawkings EquationEdemar Morsch FilhoОценок пока нет
- 1001 Solved Problems in Engineering Mathematics by Excel Academic CouncilДокумент10 страниц1001 Solved Problems in Engineering Mathematics by Excel Academic CouncilJohn govanОценок пока нет
- SN P3Документ5 страницSN P3Jan GullmanОценок пока нет
- SOLA2060 Introduction To Electronic Devices Semester 1, 2019Документ43 страницыSOLA2060 Introduction To Electronic Devices Semester 1, 2019Marquee BrandОценок пока нет
- 2019 Summer Question Paper (Msbte Study Resources)Документ5 страниц2019 Summer Question Paper (Msbte Study Resources)Ashish pathareОценок пока нет
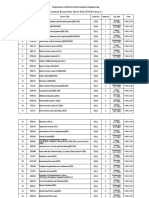
- Terminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringДокумент6 страницTerminal Exams Date Sheet-Fall 2020 (Version-1) : Department of Electrical and Computer EngineeringMuhammad Zaeem AkmalОценок пока нет
- Circuits & Resistors: Conductors & InsulatorsДокумент10 страницCircuits & Resistors: Conductors & InsulatorsH Aries OñaОценок пока нет
- Moody Chart Solver, HДокумент3 страницыMoody Chart Solver, HAnonymous LrKeCiUОценок пока нет