Вам также может понравиться
- Line Follower Robot With IntelligenceДокумент11 страницLine Follower Robot With IntelligenceSabhakant Tripathi0% (1)
- AI ImagecapturingДокумент4 страницыAI ImagecapturingSumanth KandulaОценок пока нет
- Automatic Cab Signaling System For Rail EnginesДокумент20 страницAutomatic Cab Signaling System For Rail Enginessvijay_790Оценок пока нет
- War Field Spying Robot With Night Vision Wireless Camera: Submitted byДокумент26 страницWar Field Spying Robot With Night Vision Wireless Camera: Submitted byankita dhengaleОценок пока нет
- File 1406270302Документ25 страницFile 1406270302rupeshОценок пока нет
- 37.design of WSN To Monitoring and Controlling of Environmental ParametersДокумент4 страницы37.design of WSN To Monitoring and Controlling of Environmental ParametersANAND KRISHNANОценок пока нет
- Metal Detector Robotic Vehicle: Submitted byДокумент25 страницMetal Detector Robotic Vehicle: Submitted byDarshan ParmarОценок пока нет
- WarField Land Rover That Alerts On Sensing Panted Land MinesДокумент32 страницыWarField Land Rover That Alerts On Sensing Panted Land MinesPavan KPОценок пока нет
- Wireless Railway Bridge Damage Indication Using RF TechnologyДокумент2 страницыWireless Railway Bridge Damage Indication Using RF TechnologyNationalinstituteDsnrОценок пока нет
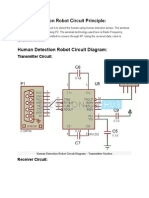
- Human Detection Robot Circuit PrincipleДокумент4 страницыHuman Detection Robot Circuit PrincipleAli KhanОценок пока нет
- 2864 Cellular Node Datasheet V4 D4iДокумент2 страницы2864 Cellular Node Datasheet V4 D4iMahmoud ElamriОценок пока нет
- Radar System Overview: Specialists in Defence & Aerospace SystemsДокумент27 страницRadar System Overview: Specialists in Defence & Aerospace SystemsGMVSrinivasaОценок пока нет
- 10 RF Control DC MotorДокумент2 страницы10 RF Control DC MotorTejesh HasanОценок пока нет
- Wireless RF Module Using PIC MCU (Slides) .Документ45 страницWireless RF Module Using PIC MCU (Slides) .Abhi Sharma100% (8)
- Qa-00447 - Vehicle Accident Prevention Using Eye Blink SensorДокумент15 страницQa-00447 - Vehicle Accident Prevention Using Eye Blink Sensorvasanth sparkОценок пока нет
- Antenna Feedline: Rf/If Front End Digitizing Adc & Dac DSP Front End Input Output Base Band ProcessingДокумент6 страницAntenna Feedline: Rf/If Front End Digitizing Adc & Dac DSP Front End Input Output Base Band ProcessingChandan RajОценок пока нет
- MIT-Michael H. PerrottДокумент535 страницMIT-Michael H. Perrottshuhaoyi5Оценок пока нет
- Data Type ID Troublshooting V4Документ15 страницData Type ID Troublshooting V4David J. MoranОценок пока нет
- Project On: Mobile Controlled RobotДокумент12 страницProject On: Mobile Controlled RobotNavneet ChandakОценок пока нет
- Micro RC Transmitter: Operating Manual For SW Version 2.0xДокумент20 страницMicro RC Transmitter: Operating Manual For SW Version 2.0xArief NurhakikiОценок пока нет
- Exp 1 Digital CommunicationДокумент8 страницExp 1 Digital CommunicationMohammedОценок пока нет
- GSM Based System Design For Industrial AutomationДокумент8 страницGSM Based System Design For Industrial AutomationAnurag DalviОценок пока нет
- RF Id Attendence MemoryДокумент128 страницRF Id Attendence Memoryakhilesh thapliyalОценок пока нет
- Touch Screen Based Wireless RobotДокумент2 страницыTouch Screen Based Wireless Robotpraveen_kodgirwarОценок пока нет
- Black BoxДокумент5 страницBlack Boxshiyasm_1Оценок пока нет
- Wireless Remote ControllerДокумент8 страницWireless Remote ControllerKrishna NaveenОценок пока нет
- 11.RF Module Based Substations MonitoringДокумент4 страницы11.RF Module Based Substations MonitoringANAND KRISHNANОценок пока нет
- Human Detection Robot DetailsДокумент6 страницHuman Detection Robot DetailschirayilrichardОценок пока нет
- Bridges & Flyover Condition Monitoring System Using Wireless NetworkДокумент6 страницBridges & Flyover Condition Monitoring System Using Wireless NetworkPreethu GowdaОценок пока нет
- Ifr Com120b TrainingДокумент78 страницIfr Com120b TrainingErmanno LanzellottoОценок пока нет
- PIRMEC PresentationДокумент41 страницаPIRMEC PresentationmanuieeeОценок пока нет
- Data Exchanging Between Two PC'S Using Ir CommunicationДокумент38 страницData Exchanging Between Two PC'S Using Ir CommunicationKanumuri SandeepОценок пока нет
- RF Technology 2020Документ65 страницRF Technology 2020Anonymous ytZsBOVОценок пока нет
- Multiple Appliance Control Using Encoder and Decoder Via RF TechniqueДокумент4 страницыMultiple Appliance Control Using Encoder and Decoder Via RF TechniqueBharat KalaОценок пока нет
- The Hobbyist's Guide To The RTL-SDRДокумент221 страницаThe Hobbyist's Guide To The RTL-SDRparapampampam85% (13)
- Final Doc 2Документ49 страницFinal Doc 2Alekhya Alex100% (1)
- Chap 1Документ92 страницыChap 1Arth PatelОценок пока нет
- Submitted To: Submitted byДокумент13 страницSubmitted To: Submitted byajayОценок пока нет
- Li-Fi Industries Communication Using Laser Media in Open SpaceДокумент61 страницаLi-Fi Industries Communication Using Laser Media in Open SpaceVinothKumar100% (1)
- LGEC002 Door Lock System Using RFДокумент8 страницLGEC002 Door Lock System Using RFShivani MehrotraОценок пока нет
- Wireless Ac Motor Speed Control Using RF CommunitionДокумент2 страницыWireless Ac Motor Speed Control Using RF CommunitionAnil ReddyОценок пока нет
- Obstacle Avoider As Well As DTMF Based Robot: Microcontroller AT89S52Документ3 страницыObstacle Avoider As Well As DTMF Based Robot: Microcontroller AT89S52lucky jОценок пока нет
- Circuit Diagram Wireless TransmitterДокумент17 страницCircuit Diagram Wireless Transmitterumaiya1990100% (2)
- Training Material of MS09A and MS09L ChassisДокумент47 страницTraining Material of MS09A and MS09L Chassisبوند بوندОценок пока нет
- EAS IoT Kits SpecsДокумент12 страницEAS IoT Kits Specscakis81369Оценок пока нет
- n0512UK-DNP3 Communication PDFДокумент35 страницn0512UK-DNP3 Communication PDFThức VõОценок пока нет
- Robot With Wireless CameraДокумент5 страницRobot With Wireless Camerapj6789Оценок пока нет
- PC-based Biomedical Instrument: Pow Er Supply O UtputДокумент14 страницPC-based Biomedical Instrument: Pow Er Supply O UtputElina Singh ThapaОценок пока нет
- B9 War Field RobotДокумент2 страницыB9 War Field RobotChemudupati SunilОценок пока нет
- Radio Frequency RemoteДокумент9 страницRadio Frequency RemoteRupesh SolankiОценок пока нет
- 10.remote-Control System of High Efficiency and Intelligent Street Lighting Using A Zigbee NetworДокумент4 страницы10.remote-Control System of High Efficiency and Intelligent Street Lighting Using A Zigbee NetworDark AngelОценок пока нет
- Literature Survey On Automatic Campus CabДокумент5 страницLiterature Survey On Automatic Campus CabGowtham S ShettyОценок пока нет
- 7 Inch Wide Screen, TFT Color LCD Type Graphic Panel + PLC Function Logic Panel LP-S070Документ5 страниц7 Inch Wide Screen, TFT Color LCD Type Graphic Panel + PLC Function Logic Panel LP-S070Herlis SavitriОценок пока нет
- Wright, Michael - Playwriting in ProcessДокумент126 страницWright, Michael - Playwriting in Processlaura100% (1)
- Webinar 5 Part 2 LTE Optimization Rev16Документ151 страницаWebinar 5 Part 2 LTE Optimization Rev16Anh HoangОценок пока нет
- Clifford - Cookin (Alt Take) PDFДокумент2 страницыClifford - Cookin (Alt Take) PDFMickael VatinОценок пока нет
- Network CompTIAДокумент38 страницNetwork CompTIApedrazini18100% (1)
- Questions & Answers On EDC OverviewДокумент89 страницQuestions & Answers On EDC Overviewkibrom atsbhaОценок пока нет
- Service: ManualДокумент58 страницService: ManualCaptain444Оценок пока нет
- The Kolon Datal FestivalДокумент2 страницыThe Kolon Datal FestivalmarkoliverbedrijoОценок пока нет
- ATEM Operation ManualДокумент85 страницATEM Operation Manualcjfb30Оценок пока нет
- Interpretation of DataДокумент30 страницInterpretation of DataNguyen Ha Truc GiangОценок пока нет
- Stylistics 6Документ3 страницыStylistics 6Adeel RazaОценок пока нет
- Classification of Musical InstrumentsДокумент4 страницыClassification of Musical InstrumentsVijay Thomas KurienОценок пока нет
- Bill Cahn CatalogДокумент5 страницBill Cahn Catalogduerdenj2591Оценок пока нет
- Monterey Bay Aquarium Annual Review 15: Inspiring A Love For The OceanДокумент17 страницMonterey Bay Aquarium Annual Review 15: Inspiring A Love For The OceaneuregauОценок пока нет
- Ujian Tengah Semester SMK Puja Mahardika: Nama: Kelas: Xi TKJ MAPEL: Bahasa InggrisДокумент4 страницыUjian Tengah Semester SMK Puja Mahardika: Nama: Kelas: Xi TKJ MAPEL: Bahasa InggrisHardi ekoОценок пока нет
- Traditions and Hertitage - Luzon RegionДокумент5 страницTraditions and Hertitage - Luzon RegionKristoffer John AmbueguiaОценок пока нет
- Yamaha Corporation (13035676)Документ13 страницYamaha Corporation (13035676)NguyenZumОценок пока нет
- Diagrama de Conexión - Catamaran Oukiva PDFДокумент1 страницаDiagrama de Conexión - Catamaran Oukiva PDFMartín Andrés García100% (1)
- CTS TestДокумент9 страницCTS TestSandeep SainiОценок пока нет
- User Manual IAP-W510 W512Документ55 страницUser Manual IAP-W510 W512oring2012Оценок пока нет
- Rca Rled5543-Uhd Enfr OkДокумент49 страницRca Rled5543-Uhd Enfr OkCesar PinedoОценок пока нет
- This Content Downloaded From 141.164.64.173 On Thu, 15 Apr 2021 01:43:26 UTCДокумент28 страницThis Content Downloaded From 141.164.64.173 On Thu, 15 Apr 2021 01:43:26 UTCAndrew BurgmayerОценок пока нет
- Unitivity 5000 In-Building Wireless Solution: Software Version 5Документ184 страницыUnitivity 5000 In-Building Wireless Solution: Software Version 5lisamharleyОценок пока нет
- Reswell User Manual CPAP V1.09 20150413Документ29 страницReswell User Manual CPAP V1.09 20150413Miki ArsovskiОценок пока нет
- Criss Angel MindfreakДокумент2 страницыCriss Angel Mindfreakankeerex674Оценок пока нет
- Drum Kit Coordination Patterns - Funk and RockДокумент144 страницыDrum Kit Coordination Patterns - Funk and Rockmarball20100% (1)
- David Berglas - WikipediaДокумент26 страницDavid Berglas - WikipediaHendri AlamОценок пока нет
- Sheldon J. Plankton - Appearances - Encyclopedia SpongeBobia - FandomДокумент19 страницSheldon J. Plankton - Appearances - Encyclopedia SpongeBobia - FandomRaynaldy Mahdi PutraОценок пока нет
- New Songs LyricsДокумент10 страницNew Songs LyricscrengОценок пока нет
- Bon IverДокумент20 страницBon Iverapi-2418133470% (1)
- RizalДокумент9 страницRizalAlexiahree ChaiОценок пока нет