Вам также может понравиться
- Gear Chikuku 1Документ37 страницGear Chikuku 1Kelvin Kindice MapurisaОценок пока нет
- Gear & Gear Trains: See The Background of Slide.... !!! For Pre-Info About Journey We Are About To BeginДокумент27 страницGear & Gear Trains: See The Background of Slide.... !!! For Pre-Info About Journey We Are About To BeginHaasen HillОценок пока нет
- PPT4 - Engineering Inspection and Quality Control PDFДокумент22 страницыPPT4 - Engineering Inspection and Quality Control PDFLOKESH NAYAK [BT20ME026]Оценок пока нет
- Bevel Gear PraveenДокумент23 страницыBevel Gear Praveen18WJ1A03F4 Shashank reddyОценок пока нет
- Friction Wheels: Toothed GearingДокумент23 страницыFriction Wheels: Toothed GearingAnmolОценок пока нет
- Gear Guide 060817Документ40 страницGear Guide 060817Vivek AbrolОценок пока нет
- 1st Seminar of Sheet Metal Bending MachineДокумент22 страницы1st Seminar of Sheet Metal Bending MachineMyo MinОценок пока нет
- Unit - Iii Gear Manufacturing Process: Sprx1008 - Production Technology - IiДокумент19 страницUnit - Iii Gear Manufacturing Process: Sprx1008 - Production Technology - Iiramesh gondilОценок пока нет
- Gear Technical FundamentalsДокумент176 страницGear Technical Fundamentalsjoe9000Оценок пока нет
- TOM CH 4 Gears FundamentalsДокумент57 страницTOM CH 4 Gears FundamentalsEmbolode, Christian JuneОценок пока нет
- Aviation Bearing GuideДокумент30 страницAviation Bearing GuideSha RvynОценок пока нет
- M06-031 - Basic Fundamentals of Gear DrivesДокумент79 страницM06-031 - Basic Fundamentals of Gear DrivesjadewestОценок пока нет
- Classification and Applications of GearsДокумент20 страницClassification and Applications of GearsnirmalkrОценок пока нет
- Chapter 2-Gear SystemДокумент26 страницChapter 2-Gear SystemNui Yuhu KuwОценок пока нет
- Bevel Gear Project ReportДокумент22 страницыBevel Gear Project ReportAnkit BurnwalОценок пока нет
- Micro-Project Report Group No-06Документ18 страницMicro-Project Report Group No-06Parth Maldhure0% (1)
- BG C08 Gear 2020 EN SVДокумент43 страницыBG C08 Gear 2020 EN SVThái TrầnОценок пока нет
- Unit - 1 HTДокумент57 страницUnit - 1 HTSoham PendseОценок пока нет
- Tsiafis 2018 IOP Conf. Ser. Mater. Sci. Eng. 393 012066Документ11 страницTsiafis 2018 IOP Conf. Ser. Mater. Sci. Eng. 393 012066QC Gishnu Gears Unit IIОценок пока нет
- Power Transmission PDFДокумент89 страницPower Transmission PDFKumar Rajesh85% (54)
- RTR BearingДокумент52 страницыRTR Bearingjhon3748Оценок пока нет
- Design and Finite Element Analysis of HiДокумент6 страницDesign and Finite Element Analysis of HiHenok GhidayОценок пока нет
- Fundamentals of Gear Drives in 6 SectionsДокумент79 страницFundamentals of Gear Drives in 6 SectionsKushal santra100% (1)
- Power Transmission PDFДокумент89 страницPower Transmission PDFShubhang Charantimath50% (2)
- GearДокумент6 страницGearshubhradiproy2003Оценок пока нет
- Centreless Grinding GuideДокумент21 страницаCentreless Grinding GuideSpartan 117100% (1)
- Renk MaagДокумент12 страницRenk MaagDhananjay B KОценок пока нет
- Chapter 3 GEAR M&MДокумент51 страницаChapter 3 GEAR M&MSYEDA VANIZA NAVED STUDENTОценок пока нет
- Japanese Industrial Standards for Gears Technical ReferenceДокумент176 страницJapanese Industrial Standards for Gears Technical ReferencevadiОценок пока нет
- Transmission 1 Transmission 1: Group 3Документ30 страницTransmission 1 Transmission 1: Group 3Edwin Anugrah EffendyОценок пока нет
- Quiz 2, A-1Документ22 страницыQuiz 2, A-1Saad AliKhanОценок пока нет
- Gear - Introduction and ClassificationДокумент4 страницыGear - Introduction and Classificationraja020Оценок пока нет
- AE 122 - Lecture NotesДокумент7 страницAE 122 - Lecture NotesHoriel PendatunОценок пока нет
- On The Interference of Internal GearingДокумент10 страницOn The Interference of Internal GearingprasannaОценок пока нет
- Design and Performance Analysis of Helical Gear For Al and Steel Material by Using AnsysДокумент10 страницDesign and Performance Analysis of Helical Gear For Al and Steel Material by Using AnsysankОценок пока нет
- Gear Guide 060817Документ0 страницGear Guide 060817Anonymous oAbjbl4HОценок пока нет
- Gear & Gear TrainДокумент20 страницGear & Gear Trainniaz kilamОценок пока нет
- Overrunning Clutch Designs: Ramp & Roller Overrunning ClutchesДокумент2 страницыOverrunning Clutch Designs: Ramp & Roller Overrunning ClutchesTaraknath MukherjeeОценок пока нет
- Helical Gears: DefinitionДокумент29 страницHelical Gears: DefinitionMuthuvel MОценок пока нет
- Important Oral QuestionsДокумент7 страницImportant Oral QuestionsDipak RandiveОценок пока нет
- Design of Transmission System Unit IIIДокумент57 страницDesign of Transmission System Unit IIIRaj MohanОценок пока нет
- Class MD 2 Lec 1 Gears...Документ92 страницыClass MD 2 Lec 1 Gears...Rai Rab Nawaz KhanОценок пока нет
- Gear Drives Spur GearsДокумент13 страницGear Drives Spur GearsNyandaMadili MalashiОценок пока нет
- Prepare Report On Gear and Its TerminologyДокумент12 страницPrepare Report On Gear and Its TerminologyMadhuri TelangeОценок пока нет
- Gear Metrology ReportДокумент59 страницGear Metrology Reportsanjay261289Оценок пока нет
- Gear EnggДокумент109 страницGear EnggPratyansh AcharyaОценок пока нет
- Unit - 4 Gear Generation & Non-Traditional Machining ProcessesДокумент57 страницUnit - 4 Gear Generation & Non-Traditional Machining Processesvibhorjain18Оценок пока нет
- Automatic Breaking SystemДокумент20 страницAutomatic Breaking SystemAkash JadhavОценок пока нет
- Modern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingОт EverandModern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingРейтинг: 4.5 из 5 звезд4.5/5 (9)
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsОт EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsРейтинг: 4 из 5 звезд4/5 (1)
- Advanced Gear Manufacturing and Finishing: Classical and Modern ProcessesОт EverandAdvanced Gear Manufacturing and Finishing: Classical and Modern ProcessesРейтинг: 3.5 из 5 звезд3.5/5 (2)
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsОт EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsРейтинг: 5 из 5 звезд5/5 (1)
- Bearings: A Tribology HandbookОт EverandBearings: A Tribology HandbookM. J. NealeРейтинг: 3 из 5 звезд3/5 (8)
- Advances in Machine Tool Design and Research 1969: Proceedings of the 10th International M.T.D.R. Conference, University of Manchester Institute of Science and Technology, September 1969От EverandAdvances in Machine Tool Design and Research 1969: Proceedings of the 10th International M.T.D.R. Conference, University of Manchester Institute of Science and Technology, September 1969S. A. TobiasОценок пока нет
- How to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheОт EverandHow to Run a Lathe - Volume I (Edition 43) The Care and Operation of a Screw-Cutting LatheРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Turning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.От EverandTurning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.Оценок пока нет
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisОт EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisОценок пока нет
- Coal IndustryДокумент1 страницаCoal IndustryAditya KadamОценок пока нет
- Notice: (For Recruitment of Various NTPC Graduate and Under Graduate Posts)Документ1 страницаNotice: (For Recruitment of Various NTPC Graduate and Under Graduate Posts)Asif AhmedОценок пока нет
- Untitled PDFДокумент14 страницUntitled PDFAjith KumarОценок пока нет
- Pin Fin 001Документ11 страницPin Fin 001Ajith KumarОценок пока нет
- Elements of Mechine DegineДокумент2 страницыElements of Mechine DegineAjith Kumar100% (1)
- GMRIT Computer Science CurriculumДокумент11 страницGMRIT Computer Science CurriculumAjith KumarОценок пока нет
- Student Undertaking FormДокумент1 страницаStudent Undertaking FormAjith KumarОценок пока нет
- SGT 2Документ1 страницаSGT 2Ajith KumarОценок пока нет
- Liu-A Review of MPPT Techn - For Use in Partially Shaded Conditions-2015Документ18 страницLiu-A Review of MPPT Techn - For Use in Partially Shaded Conditions-2015Aleksandar MarkovicОценок пока нет
- Pin Fin 001Документ11 страницPin Fin 001Ajith KumarОценок пока нет
- Department of Mechanical Engineering: Test No: 2Документ11 страницDepartment of Mechanical Engineering: Test No: 2Ajith KumarОценок пока нет
- Audit Course 3rd Attempt Exam Timetable - August-2019 - 2017 BatchДокумент1 страницаAudit Course 3rd Attempt Exam Timetable - August-2019 - 2017 BatchAjith KumarОценок пока нет
- Student Undertaking FormДокумент1 страницаStudent Undertaking FormAjith KumarОценок пока нет
- Manufacturing Process of Ferro Chrome: B.KishorkumarДокумент3 страницыManufacturing Process of Ferro Chrome: B.KishorkumarAjith KumarОценок пока нет
- Elements of Mechine DegineДокумент2 страницыElements of Mechine DegineAjith Kumar100% (1)
- RRB Secunderabad V2 PDFДокумент80 страницRRB Secunderabad V2 PDFAjith KumarОценок пока нет
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Lin 2017Документ4 страницыLin 2017Ajith KumarОценок пока нет
- Machine ToolsДокумент238 страницMachine ToolsSeban AugustineОценок пока нет
- Student Undertaking FormДокумент1 страницаStudent Undertaking FormAjith KumarОценок пока нет
- Strength of Materials - 2marks PDFДокумент37 страницStrength of Materials - 2marks PDFAjith KumarОценок пока нет
- 1.4 Mechanisms (Inversions)Документ30 страниц1.4 Mechanisms (Inversions)Ajith KumarОценок пока нет
- Maths 3Документ12 страницMaths 3Ajith KumarОценок пока нет
- Internalcombustionenginedv 151125080505 Lva1 App6892 PDFДокумент384 страницыInternalcombustionenginedv 151125080505 Lva1 App6892 PDFAjith KumarОценок пока нет
- Result CEN 012018 ALP Tech For atДокумент13 страницResult CEN 012018 ALP Tech For atLokesh SharmaОценок пока нет
- Stat GKДокумент13 страницStat GKdjОценок пока нет
- Strength of Materials - 2marks PDFДокумент37 страницStrength of Materials - 2marks PDFAjith KumarОценок пока нет
- Manufacturing Processes and MaterialsДокумент16 страницManufacturing Processes and MaterialsVishal SehrawatОценок пока нет
- Trouble ShootingДокумент3 страницыTrouble Shootingsami4330Оценок пока нет
- BacklashДокумент8 страницBacklashVaibhav PatilОценок пока нет
- Secondary Encoder FlyerДокумент2 страницыSecondary Encoder FlyerxОценок пока нет
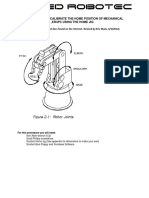
- ADJUST AND CALIBRATE HOME POSITION OF MECHANICAL ARMSДокумент15 страницADJUST AND CALIBRATE HOME POSITION OF MECHANICAL ARMSpauloОценок пока нет
- BallbarДокумент3 страницыBallbarVladimirAgeevОценок пока нет
- Helical Gears: Definition and Useful InformationДокумент13 страницHelical Gears: Definition and Useful InformationRobert Michael CorpusОценок пока нет
- D85EX-15 - Operation ManualДокумент174 страницыD85EX-15 - Operation ManualViktor RadaОценок пока нет
- A68-95 RKДокумент28 страницA68-95 RKcasio2008Оценок пока нет
- 9T1000 DimensionalesДокумент1 страница9T1000 DimensionalesJosé BlancoОценок пока нет
- Neugart Productline11Документ2 страницыNeugart Productline11QuantumAutomationОценок пока нет
- Rack and Pinion CatalogДокумент12 страницRack and Pinion CatalogMatei AlexandruОценок пока нет
- F5M42 Transmission Service ManualДокумент54 страницыF5M42 Transmission Service ManualTim Zimmer100% (4)
- D155axi-8 Sen06521-02 Maintenance StandardДокумент116 страницD155axi-8 Sen06521-02 Maintenance Standardhaimay118Оценок пока нет
- ShavingДокумент8 страницShavingkarthikОценок пока нет
- Open Gears: Lubrication + Maintenance + ServiceДокумент16 страницOpen Gears: Lubrication + Maintenance + ServicebulentbulutОценок пока нет
- Preventive Maintenance of Electroglas Eg2001Документ8 страницPreventive Maintenance of Electroglas Eg2001Tan Chiang Li100% (1)
- Engine Repair Assessment (A1Документ28 страницEngine Repair Assessment (A1Bryan LopesОценок пока нет
- Machine Design & Drawing - II - GEARSДокумент12 страницMachine Design & Drawing - II - GEARSSenthil KumarОценок пока нет
- Simranflowtech Catalogue Screw Jack DetailedДокумент18 страницSimranflowtech Catalogue Screw Jack Detailedpushp00Оценок пока нет
- Agma 2002 b88Документ48 страницAgma 2002 b88Nursena SEVİNÇОценок пока нет
- Kerk Catalog 2008 PDFДокумент74 страницыKerk Catalog 2008 PDFhexapodoОценок пока нет
- 格特威英文样本2018 PDFДокумент56 страниц格特威英文样本2018 PDFBinxiang XuОценок пока нет
- V-Star 1300 Manual 4xy-28197-E0Документ498 страницV-Star 1300 Manual 4xy-28197-E0Angel VázquezОценок пока нет
- Trnsmision Marina Rcd. 1250Документ42 страницыTrnsmision Marina Rcd. 1250Diego Fernandez RodriguezОценок пока нет
- Elements of Metric Gear TechnologyДокумент234 страницыElements of Metric Gear Technologyhrh_pogcОценок пока нет
- Gear & Design Gearbox DJSДокумент12 страницGear & Design Gearbox DJSAnonymous z4Fe39jОценок пока нет
- Verado L6 200-300 Gen5 & 350-400R Service ManualДокумент833 страницыVerado L6 200-300 Gen5 & 350-400R Service Manualhernan cardenas87% (30)
- 1.8 MVSAT PatriotДокумент12 страниц1.8 MVSAT Patriotemail backupОценок пока нет
- Catalog: (E) Drn.. (Ie3) Gearmotors - 60 HZ Drn.. and Edrn.. Gearmotors in Hazloc-NaДокумент860 страницCatalog: (E) Drn.. (Ie3) Gearmotors - 60 HZ Drn.. and Edrn.. Gearmotors in Hazloc-Naprojektant2Оценок пока нет
- Measure Wire Diameter with Screw Gauge LabДокумент24 страницыMeasure Wire Diameter with Screw Gauge LabPoorvaBakshiОценок пока нет