Вам также может понравиться
- Industrial Machine and ControlsДокумент31 страницаIndustrial Machine and ControlsCarol Soi100% (4)
- Calculus HandbookДокумент198 страницCalculus HandbookMuneeb Sami100% (1)
- Sample Cross-Complaint For Indemnity For CaliforniaДокумент4 страницыSample Cross-Complaint For Indemnity For CaliforniaStan Burman75% (8)
- Differential Amplifier Using BJTДокумент11 страницDifferential Amplifier Using BJTAssini HussainОценок пока нет
- Chapter 4: Combinational Logic Solutions To Problems: (1, 5, 9, 12, 19, 23, 30, 33)Документ14 страницChapter 4: Combinational Logic Solutions To Problems: (1, 5, 9, 12, 19, 23, 30, 33)Gabriel FernandoОценок пока нет
- Computer Servicing 4: Introduction To Logic Gates Boolean AlgebraДокумент13 страницComputer Servicing 4: Introduction To Logic Gates Boolean AlgebraJhon Keneth NamiasОценок пока нет
- VHDL 4 To 1 Mux (Multiplexer)Документ9 страницVHDL 4 To 1 Mux (Multiplexer)Beto Cueva AltamiranoОценок пока нет
- DLD Lab#5 ReportДокумент8 страницDLD Lab#5 ReportAitazazОценок пока нет
- Better Photography - April 2018 PDFДокумент100 страницBetter Photography - April 2018 PDFPeter100% (1)
- Mark Magazine#65Документ196 страницMark Magazine#65AndrewKanischevОценок пока нет
- Tetra IntroductionДокумент65 страницTetra Introductionuniversidaddistrital100% (2)
- Conveyor Control Using Programmable Logic ControllerДокумент7 страницConveyor Control Using Programmable Logic ControllerWann RexroОценок пока нет
- CH 4Документ71 страницаCH 4asisha mostОценок пока нет
- 10a 3 Bit Up Down Counter DoneДокумент6 страниц10a 3 Bit Up Down Counter DoneVenkatGollaОценок пока нет
- Pricing of A Revolutionary ProductДокумент22 страницыPricing of A Revolutionary ProductiluvparixitОценок пока нет
- American International University-Bangladesh: Title: Design of A 2 To 4 Decoder and A Decimal To BCD EncoderДокумент4 страницыAmerican International University-Bangladesh: Title: Design of A 2 To 4 Decoder and A Decimal To BCD EncoderAbid ChowdhuryОценок пока нет
- Experiment No 3Документ20 страницExperiment No 3Ako C SeanОценок пока нет
- IIR Direct Form RealizationДокумент69 страницIIR Direct Form RealizationAbdul Basit MughalОценок пока нет
- LCD and KEYBORD Interfacing Part 1Документ25 страницLCD and KEYBORD Interfacing Part 1Prathamesh AmateОценок пока нет
- Microprocessor All Experiment IT PDFДокумент22 страницыMicroprocessor All Experiment IT PDFSuraj KumarОценок пока нет
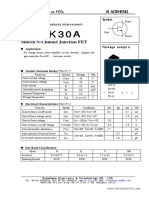
- K30a PDFДокумент1 страницаK30a PDFVictorManuelBernalBlancoОценок пока нет
- Experiment 7 - Flip-FlopsДокумент4 страницыExperiment 7 - Flip-FlopsPrr PrrОценок пока нет
- Gray To Binary and Binary To Gray Code Converter: Exp - No: Date: Aim: To Design and Implement A Circuit Which ConvertsДокумент3 страницыGray To Binary and Binary To Gray Code Converter: Exp - No: Date: Aim: To Design and Implement A Circuit Which ConvertsNafeesa SalehОценок пока нет
- Exper-4 SOP and POSДокумент2 страницыExper-4 SOP and POSMohammed Dyhia Ali0% (1)
- Parity Generator Checker PDFДокумент3 страницыParity Generator Checker PDFSujesh P Lal67% (3)
- Solution of Quiz 3Документ5 страницSolution of Quiz 3Pranavkumar PatilОценок пока нет
- CMOS Logic FamilyДокумент6 страницCMOS Logic FamilyAjay GeorgeОценок пока нет
- Project Report Digital Clock: Abu Dhabi UniversityДокумент11 страницProject Report Digital Clock: Abu Dhabi UniversityAbbas RajpootОценок пока нет
- Number SeriesДокумент96 страницNumber Serieshoney1002Оценок пока нет
- Stucor CS3351-GKДокумент269 страницStucor CS3351-GKNightdive StudiosОценок пока нет
- Lab#2B: Half-Wave Rectifier Circuit Without and With FilterДокумент5 страницLab#2B: Half-Wave Rectifier Circuit Without and With FilterHemanth GedelaОценок пока нет
- 1 2 1 Ak Combinationallogicdesign SeatbeltДокумент4 страницы1 2 1 Ak Combinationallogicdesign Seatbeltapi-290804719Оценок пока нет
- AIM:-To Write and Test The VHDL Code of 3TO 8 DECODER, USING 2 TO 4 DECODERДокумент5 страницAIM:-To Write and Test The VHDL Code of 3TO 8 DECODER, USING 2 TO 4 DECODERPhaniKumar ParvathamОценок пока нет
- Verilog SolnДокумент15 страницVerilog Solngannoju423100% (1)
- Implementation of de Morgan's Law With Three Input.Документ4 страницыImplementation of de Morgan's Law With Three Input.Mohayminul Al-HamimОценок пока нет
- CS302 - Lab Manual - Week No PDFДокумент5 страницCS302 - Lab Manual - Week No PDFattiqueОценок пока нет
- Hardware Software Codesign Question PaperДокумент2 страницыHardware Software Codesign Question PaperRaviОценок пока нет
- Verify Four Voltage and Current Parameters For TTL and Cmos (Ic 74Lsxx, 74Hcxx)Документ8 страницVerify Four Voltage and Current Parameters For TTL and Cmos (Ic 74Lsxx, 74Hcxx)sonalibhagwatkar100% (1)
- DLD 5 Lab ReportsДокумент25 страницDLD 5 Lab ReportsHamza Shah100% (1)
- Experiment 5Документ16 страницExperiment 5Ravi Kanth M N33% (3)
- Experiment-11 BCD Code To 7-Segment Decoder 11-1 ObjectДокумент3 страницыExperiment-11 BCD Code To 7-Segment Decoder 11-1 ObjectMohammed Dyhia AliОценок пока нет
- Implementation of A Logic Circuit From 8x3 Encoder and A Multiplexer.Документ4 страницыImplementation of A Logic Circuit From 8x3 Encoder and A Multiplexer.Mohayminul Al-HamimОценок пока нет
- EC 6302 2-Marks and 16 Marks QuestionsДокумент12 страницEC 6302 2-Marks and 16 Marks QuestionsskaruppaiaheceОценок пока нет
- Ee 241 Digital Circuits Final Exam Solution ManualДокумент10 страницEe 241 Digital Circuits Final Exam Solution ManualkdrdОценок пока нет
- Implementation of A Full Adder Circuit With A Decoder and Tow OR Gates.Документ3 страницыImplementation of A Full Adder Circuit With A Decoder and Tow OR Gates.Mohayminul Al-Hamim100% (1)
- Digital Electronics Circuits: Experiment: 9Документ4 страницыDigital Electronics Circuits: Experiment: 9movabОценок пока нет
- Problem - Write An Assembly Language Program To Add Two 8 Bit Numbers Stored at Address 2050 and Address 2051 in 8085Документ16 страницProblem - Write An Assembly Language Program To Add Two 8 Bit Numbers Stored at Address 2050 and Address 2051 in 8085Robert LionОценок пока нет
- Frequency Divider D-Flip-flopsДокумент12 страницFrequency Divider D-Flip-flopsSylvester Delali Dordzi0% (1)
- Experiment 7: Magnitude ComparatorsДокумент5 страницExperiment 7: Magnitude Comparatorsanirudh lakshminarasimhanОценок пока нет
- 218 1499022343 - 02-07-2017 PDFДокумент5 страниц218 1499022343 - 02-07-2017 PDFEditor IJRITCCОценок пока нет
- Sample Solutions: TH TH THДокумент6 страницSample Solutions: TH TH THDivyankk VyasОценок пока нет
- PCM Pulse Code ModulationДокумент30 страницPCM Pulse Code ModulationtemppppОценок пока нет
- 16 Bit CalculatorДокумент17 страниц16 Bit CalculatorPankaj JaiswalОценок пока нет
- 15ecl48 VTU Raghudathesh R 2r DacДокумент5 страниц15ecl48 VTU Raghudathesh R 2r Dacraghudatheshgp100% (1)
- Vlsidesign MCQДокумент18 страницVlsidesign MCQAkanksha DixitОценок пока нет
- PCMДокумент13 страницPCMPavan SaiОценок пока нет
- Digital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AДокумент19 страницDigital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AKavya ChoudharyОценок пока нет
- Aim: Apparatus: Theory:: Experiment No. 1Документ22 страницыAim: Apparatus: Theory:: Experiment No. 1Syeda InaasОценок пока нет
- Analog Communication Lab ManualДокумент59 страницAnalog Communication Lab Manualsasa_sag100% (2)
- 8051 Code LockДокумент3 страницы8051 Code LockKhushi Khanna67% (3)
- Experiment-7 Design A Binary Subtractor Circuit Half and Full Subtractor 7-1 ObjectДокумент4 страницыExperiment-7 Design A Binary Subtractor Circuit Half and Full Subtractor 7-1 ObjectMohammed Dyhia AliОценок пока нет
- The IN and OUT Instructions in The 8086 MicroprocessorДокумент10 страницThe IN and OUT Instructions in The 8086 MicroprocessordtselvanОценок пока нет
- Implementation of de Morgan's Law With Two Input.Документ3 страницыImplementation of de Morgan's Law With Two Input.Mohayminul Al-HamimОценок пока нет
- CCN Assg QuestionsДокумент1 страницаCCN Assg QuestionsMuhammad Sohail SohailОценок пока нет
- Laboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationДокумент50 страницLaboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationYasashiRikaiОценок пока нет
- Laboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationДокумент49 страницLaboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationAnthony BoulosОценок пока нет
- LABEX2Документ49 страницLABEX2tranxuankien203Оценок пока нет
- Laboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationДокумент14 страницLaboratory Exercise 2: Discrete-Time Systems: Time-Domain RepresentationNguyễn HưngОценок пока нет
- AcousticsДокумент122 страницыAcousticsEclipse YuОценок пока нет
- Health and Safety For The Meat Industry: Guidance NotesДокумент198 страницHealth and Safety For The Meat Industry: Guidance NotesPredrag AndjelkovicОценок пока нет
- OVDT Vs CRT - GeneralДокумент24 страницыOVDT Vs CRT - Generaljaiqc100% (1)
- Discovery and Integration Content Guide - General ReferenceДокумент37 страницDiscovery and Integration Content Guide - General ReferencerhocuttОценок пока нет
- Technion - Computer Science Department - Technical Report CS0055 - 1975Документ25 страницTechnion - Computer Science Department - Technical Report CS0055 - 1975MoltKeeОценок пока нет
- Taylor Et Al v. Acxiom Corporation Et Al - Document No. 91Документ40 страницTaylor Et Al v. Acxiom Corporation Et Al - Document No. 91Justia.comОценок пока нет
- Report On Marketing Strategy of Nestle MILKPAKДокумент13 страницReport On Marketing Strategy of Nestle MILKPAKAzeem Ahmad100% (1)
- Particle BoardДокумент1 страницаParticle BoardNamrata RamahОценок пока нет
- Toxemias of PregnancyДокумент3 страницыToxemias of PregnancyJennelyn LumbreОценок пока нет
- Eu Schengen Catalogue enДокумент54 страницыEu Schengen Catalogue enSorin din ConstanțaОценок пока нет
- DISCHARGE PLAN CuyosДокумент6 страницDISCHARGE PLAN CuyosShaweeyah Mariano BabaoОценок пока нет
- ISO - 21.060.10 - Bolts, Screws, Studs (List of Codes)Документ9 страницISO - 21.060.10 - Bolts, Screws, Studs (List of Codes)duraisingh.me6602Оценок пока нет
- 1996 OKI LCD Driver Controller DatabookДокумент232 страницы1996 OKI LCD Driver Controller Databookpiptendo100% (1)
- Feds Subpoena W-B Area Info: He Imes EaderДокумент42 страницыFeds Subpoena W-B Area Info: He Imes EaderThe Times LeaderОценок пока нет
- 3rd Page 5Документ1 страница3rd Page 5api-282737728Оценок пока нет
- Water Tanker Check ListДокумент8 страницWater Tanker Check ListHariyanto oknesОценок пока нет
- 2a Unani Medicine in India - An OverviewДокумент123 страницы2a Unani Medicine in India - An OverviewGautam NatrajanОценок пока нет
- Audi R8 Advert Analysis by Masum Ahmed 10PДокумент2 страницыAudi R8 Advert Analysis by Masum Ahmed 10PMasum95Оценок пока нет
- Antibiotics MCQsДокумент4 страницыAntibiotics MCQsPh Israa KadhimОценок пока нет
- Protection in Distributed GenerationДокумент24 страницыProtection in Distributed Generationbal krishna dubeyОценок пока нет
- Nutrition Great Foods For Getting Vitamins A To K in Your DietДокумент1 страницаNutrition Great Foods For Getting Vitamins A To K in Your DietDhruv DuaОценок пока нет
- Public Access - The GauntletДокумент1 страницаPublic Access - The GauntletTesting0% (2)