Вам также может понравиться
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Arnes Paccar mx13 2017Документ10 страницArnes Paccar mx13 2017Adderly Chinchero Torres100% (3)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Yamaha Fazer User Owner Manual FZ6SHG 2008 PDFДокумент96 страницYamaha Fazer User Owner Manual FZ6SHG 2008 PDFRobert NadeauОценок пока нет
- hp52 2001Документ13 страницhp52 2001GoodBikesОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- 0h0983 B PDFДокумент156 страниц0h0983 B PDFjulio cesar100% (2)
- Hydraulic Cylinder: Guided By:-Dr. Pankaj Sahlot Presented By: - Kishan Savaliya (15Bme149D) Viken Patel (14BME072)Документ15 страницHydraulic Cylinder: Guided By:-Dr. Pankaj Sahlot Presented By: - Kishan Savaliya (15Bme149D) Viken Patel (14BME072)SK MagnetxОценок пока нет
- m-17 Propeller QuestionsДокумент28 страницm-17 Propeller QuestionsqwesadОценок пока нет
- ABB Generator SpecificationДокумент14 страницABB Generator SpecificationSathish KumarОценок пока нет
- For 2023 BudgetingДокумент15 страницFor 2023 BudgetingFrancis DedumoОценок пока нет
- Jointer and Planer As A Team PDFДокумент4 страницыJointer and Planer As A Team PDFgortonm1100% (1)
- Japanese Tool Box PlanДокумент2 страницыJapanese Tool Box PlanRJ Bevy67% (3)
- 2b3 SmartUP Parts Manual, 24472102 Rev.B Mar.2013Документ42 страницы2b3 SmartUP Parts Manual, 24472102 Rev.B Mar.2013Izabela SantanaОценок пока нет
- Windshield Wiper Motor Removal and InstallationДокумент3 страницыWindshield Wiper Motor Removal and InstallationMichael HernandezОценок пока нет
- Floating Windmill PowerpointДокумент25 страницFloating Windmill PowerpointPavan Kumar100% (1)
- Floating Windmill PowerpointДокумент25 страницFloating Windmill PowerpointPavan Kumar100% (1)
- P&id LegendДокумент1 страницаP&id Legendkamal arabОценок пока нет
- EXU enДокумент122 страницыEXU enMahmoud Elpop ElsalhОценок пока нет
- Lombardini 3LD510 Std.Документ31 страницаLombardini 3LD510 Std.Cornel CristianОценок пока нет
- Rocker BogieДокумент31 страницаRocker BogiePavan KumarОценок пока нет
- Smart Helmet For DriverДокумент15 страницSmart Helmet For DriverPavan KumarОценок пока нет
- Mainprojectedtd 151114185045 Lva1 App6892Документ14 страницMainprojectedtd 151114185045 Lva1 App6892Pavan KumarОценок пока нет
- The Effect of Pendolino High-Speed Rail On The STRДокумент8 страницThe Effect of Pendolino High-Speed Rail On The STRPavan KumarОценок пока нет
- Floating Windmill PDFДокумент31 страницаFloating Windmill PDFrishirajtomar100% (3)
- Instruction Sheet Is Fq9010 - Style Number Fq9010Mk, Fq9010AwДокумент3 страницыInstruction Sheet Is Fq9010 - Style Number Fq9010Mk, Fq9010Awdayshift5Оценок пока нет
- Woodworking Machinery PDFДокумент62 страницыWoodworking Machinery PDFRon MillsОценок пока нет
- Powertrain Troubleshooting (Test and Adjust)Документ11 страницPowertrain Troubleshooting (Test and Adjust)Jean Jacques ouanda100% (1)
- Kenr5406 03 00 PubДокумент2 страницыKenr5406 03 00 PubAhmed MoustafaОценок пока нет
- Ad Series 200-280kva 3PHДокумент6 страницAd Series 200-280kva 3PHsayadul mostafaОценок пока нет
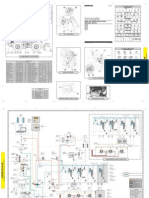
- 938G Series II Wheel Loader Electrical System IT38G Series II Integrated ToolcarrierДокумент4 страницы938G Series II Wheel Loader Electrical System IT38G Series II Integrated ToolcarrierGlenn DiazОценок пока нет
- COMPSДокумент2 страницыCOMPSHarsh NklkОценок пока нет
- Module 8 Machine SafetyДокумент19 страницModule 8 Machine SafetyJeffrey Jerome Abejero BeñolaОценок пока нет
- 2013 Nissan GT R 47638 PDFДокумент23 страницы2013 Nissan GT R 47638 PDFNuno Gonçalo Matos50% (2)
- Motion Canada - Bearing CatalogДокумент212 страницMotion Canada - Bearing CatalogEric Lafrance100% (1)
- Whirlpool Awg 336 2Документ11 страницWhirlpool Awg 336 2Dino SОценок пока нет
- TR 30 M EngДокумент4 страницыTR 30 M EngFlavio SanchezОценок пока нет
- Denyo Welding Generator ManualДокумент2 страницыDenyo Welding Generator ManualThein Lin HtunОценок пока нет
- 924 WLB CargadorДокумент2 страницы924 WLB CargadorYhanmyr BravoОценок пока нет