Вам также может понравиться
- Slider Crank Mechanism Lab Report Ms Word ... 2017me162Документ11 страницSlider Crank Mechanism Lab Report Ms Word ... 2017me162Binya meen50% (2)
- ME2151 - Engineering MechanicsДокумент46 страницME2151 - Engineering MechanicsJ R Vinod KumaarОценок пока нет
- Engineering MechanicsДокумент46 страницEngineering MechanicsAnonymous Zx7EG1PaОценок пока нет
- Buckling TestДокумент2 страницыBuckling TestahmhmmhОценок пока нет
- Slider Crank MechanismДокумент22 страницыSlider Crank MechanismSmart100% (1)
- Ohm Laws and Wire ResistivityДокумент17 страницOhm Laws and Wire Resistivitysari wahyuniОценок пока нет
- Differential Transformation Method for Mechanical Engineering ProblemsОт EverandDifferential Transformation Method for Mechanical Engineering ProblemsОценок пока нет
- Metrology Lab Manual: Digitized by UpenДокумент34 страницыMetrology Lab Manual: Digitized by UpenSashank VissaОценок пока нет
- ME2307 Lab ManualДокумент14 страницME2307 Lab ManualAnirudhan RaviОценок пока нет
- Lab Manual For Kinematics of MachinesДокумент18 страницLab Manual For Kinematics of Machinesshailendra_236Оценок пока нет
- Slider CrankДокумент3 страницыSlider CrankAnonymous GGtvR65MR100% (1)
- Mechanics of Machines ME2031: Lab Instructor: Awais LiaqatДокумент12 страницMechanics of Machines ME2031: Lab Instructor: Awais LiaqatAnonymous B0cm7LZhОценок пока нет
- Metrology Lab ManualДокумент21 страницаMetrology Lab ManualelavarasanОценок пока нет
- Buckling of ColumnДокумент7 страницBuckling of ColumnDilan IndikaОценок пока нет
- Metrology Lab - ManualДокумент30 страницMetrology Lab - ManualRavi Krishnegowda100% (2)
- Experiment 1 TOMДокумент2 страницыExperiment 1 TOMabhishekkumar1_gbpec25% (4)
- Column Buckling TestДокумент8 страницColumn Buckling TestWiy GuomОценок пока нет
- IPE - 302 Sessional SheetДокумент22 страницыIPE - 302 Sessional SheetzahirrayhanОценок пока нет
- Slider Crank Mechanism Term Project ReportДокумент15 страницSlider Crank Mechanism Term Project ReportUsamaОценок пока нет
- Report On Four Bar Mechanism of Sewing MachineДокумент8 страницReport On Four Bar Mechanism of Sewing MachineshazedislamОценок пока нет
- IJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABДокумент6 страницIJIRAE::Design and DMU Kinematic Analysis of Slider Crank Mechanism Using CATIA and MATLABIJIRAE- International Journal of Innovative Research in Advanced EngineeringОценок пока нет
- Experiment No.1Документ8 страницExperiment No.1Awais AhmadОценок пока нет
- Friction From Meriam PDF 161228121738 PDFДокумент62 страницыFriction From Meriam PDF 161228121738 PDFTHEOPHILUS ATO FLETCHERОценок пока нет
- Kinematics and Dynamics of Machinery Lab ManualДокумент63 страницыKinematics and Dynamics of Machinery Lab ManualsaranОценок пока нет
- Explain Quick Return Mechanism PDFДокумент2 страницыExplain Quick Return Mechanism PDFKelly0% (1)
- Complete Textile Mechanics LabДокумент47 страницComplete Textile Mechanics LabEngr Mujahid MehdiОценок пока нет
- Quick Return MechanismsДокумент2 страницыQuick Return MechanismsAbhinash KumarОценок пока нет
- Mechanisms Final ReportДокумент44 страницыMechanisms Final ReportOmar SaleemОценок пока нет
- Quick-Return Mechanism Design and Analysis ProjectДокумент16 страницQuick-Return Mechanism Design and Analysis ProjectPatel NikhilОценок пока нет
- Differential Equations (Calculus) Mathematics E-Book For Public ExamsОт EverandDifferential Equations (Calculus) Mathematics E-Book For Public ExamsРейтинг: 5 из 5 звезд5/5 (1)
- Factorization Methods for Discrete Sequential EstimationОт EverandFactorization Methods for Discrete Sequential EstimationОценок пока нет
- Scotch YokeДокумент7 страницScotch YokeSandeela NaveedОценок пока нет
- Numerical Solutions of Boundary Value Problems for Ordinary Differential EquationsОт EverandNumerical Solutions of Boundary Value Problems for Ordinary Differential EquationsA.K. AzizОценок пока нет
- Balancing RobotДокумент5 страницBalancing RobotMilton MuñozОценок пока нет
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceОт EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissОценок пока нет
- Basu-Fem Notes Me623Документ210 страницBasu-Fem Notes Me623Subhradeep ChatterjeeОценок пока нет
- Lab 3 Sheet Buckling-21Sep11Документ3 страницыLab 3 Sheet Buckling-21Sep11Mohd FazliОценок пока нет
- Kinematics of Machines PDFДокумент133 страницыKinematics of Machines PDFarjunОценок пока нет
- Lab Report # 1: Crank and Slider MechanismДокумент5 страницLab Report # 1: Crank and Slider MechanismsaadОценок пока нет
- 9A03502 Dynamics of MachineryДокумент4 страницы9A03502 Dynamics of MachinerysivabharathamurthyОценок пока нет
- 1.0 Job/Experiment No.: Me594/05 2.0 NAME OF EXPERIMENT: Angle Measurement Using Sine Bar & SlipДокумент6 страниц1.0 Job/Experiment No.: Me594/05 2.0 NAME OF EXPERIMENT: Angle Measurement Using Sine Bar & SlipHimanshu Vasistha0% (1)
- Module 5 Balancing of Rotating Masses NM RepairedДокумент25 страницModule 5 Balancing of Rotating Masses NM RepairedRuchindra KumarОценок пока нет
- Shakil LVDT Lab ReportДокумент11 страницShakil LVDT Lab ReportShakil MalikОценок пока нет
- 4OTALLYДокумент28 страниц4OTALLYlino_borrotoОценок пока нет
- Static and Dynamic Characteristics of Measurement SystemДокумент8 страницStatic and Dynamic Characteristics of Measurement Systemc5404Оценок пока нет
- Ma2111 ImpartantДокумент13 страницMa2111 ImpartantPrem KumarОценок пока нет
- Design and Fabrication of A GripperДокумент8 страницDesign and Fabrication of A Gripperengr_faheemОценок пока нет
- Lab Report Cen Force - 1Документ5 страницLab Report Cen Force - 1api-257247956Оценок пока нет
- Bisection MethodДокумент6 страницBisection MethodYoucef MohammedОценок пока нет
- Rotational MechanicsДокумент17 страницRotational MechanicsAnant KumarОценок пока нет
- Physics 2 Lab Report 2Документ5 страницPhysics 2 Lab Report 2api-302419600Оценок пока нет
- Unit 5 Balancing of Reciprocating MassesДокумент43 страницыUnit 5 Balancing of Reciprocating MassesNAVEENОценок пока нет
- 3-Waves of RoboticsДокумент2 страницы3-Waves of RoboticsEbrahim Abd El HadyОценок пока нет
- MCQ Important QuestionДокумент2 страницыMCQ Important QuestionAmit MahajanОценок пока нет
- Synchronization Motion Control For Quad-Cylinder Lift Systems With Acceleration CouplingДокумент6 страницSynchronization Motion Control For Quad-Cylinder Lift Systems With Acceleration Couplingamin342Оценок пока нет
- Question Bank Unit IIДокумент10 страницQuestion Bank Unit IISachin BharadwajОценок пока нет
- Speed Control of DC MotorДокумент4 страницыSpeed Control of DC MotorjitbakОценок пока нет
- Assignment 1 (From Group Leader)Документ1 страницаAssignment 1 (From Group Leader)Muhammad ALI NoorОценок пока нет
- Dipthongs and Other GrammerДокумент6 страницDipthongs and Other GrammerMuhammad ALI NoorОценок пока нет
- ApplicationДокумент1 страницаApplicationMuhammad ALI NoorОценок пока нет
- Test Pattern For Class 9: MathsДокумент1 страницаTest Pattern For Class 9: MathsMuhammad ALI NoorОценок пока нет
- Emerson Control ValveДокумент319 страницEmerson Control ValveMudabbir Shan AhmedОценок пока нет
- AOform PDFДокумент6 страницAOform PDFfaisal_ahsan7919Оценок пока нет
- Presentation 1Документ1 страницаPresentation 1Muhammad ALI NoorОценок пока нет
- Pics For ElectronicsДокумент2 страницыPics For ElectronicsMuhammad ALI NoorОценок пока нет
- Course Outline BSC Mechanical Eng2015Документ20 страницCourse Outline BSC Mechanical Eng2015Arsalan IdreesОценок пока нет
- Alw Effective Listening Powerpoint Draft Dec30Документ31 страницаAlw Effective Listening Powerpoint Draft Dec30Muhammad ALI NoorОценок пока нет
- Pakistan in Contemporary World PDFДокумент10 страницPakistan in Contemporary World PDFMuhammad ALI NoorОценок пока нет
- Experiment # 1 PDFДокумент15 страницExperiment # 1 PDFMuhammad ALI NoorОценок пока нет
- Pakistan in Contemporary World PDFДокумент10 страницPakistan in Contemporary World PDFMuhammad ALI NoorОценок пока нет
- Experiment # 5 To Verify Kirchhoff's Voltage Law: ObjectiveДокумент2 страницыExperiment # 5 To Verify Kirchhoff's Voltage Law: ObjectiveMuhammad ALI NoorОценок пока нет
- Experiment 9Документ4 страницыExperiment 9Muhammad ALI NoorОценок пока нет
- Title PageДокумент1 страницаTitle PageMuhammad ALI NoorОценок пока нет
- Batch-04 FRL101 1 PDFДокумент3 страницыBatch-04 FRL101 1 PDFbillionaire makersОценок пока нет
- To TestДокумент1 страницаTo TestMuhammad ALI NoorОценок пока нет
- Batch-04 FRL101 1 PDFДокумент3 страницыBatch-04 FRL101 1 PDFbillionaire makersОценок пока нет
- 1) Sound 2) External 3) Noises 4) Crying 5) Eardrum: 1) Never 2) Strongest 3) Magnetic 4) BAR 5) NaturalДокумент1 страница1) Sound 2) External 3) Noises 4) Crying 5) Eardrum: 1) Never 2) Strongest 3) Magnetic 4) BAR 5) NaturalMuhammad ALI NoorОценок пока нет
- Experiment # 10 To Determine That The Total Force Is The Sum of All Forces Acting On BodyДокумент4 страницыExperiment # 10 To Determine That The Total Force Is The Sum of All Forces Acting On BodyMuhammad ALI NoorОценок пока нет
- Application FormatДокумент1 страницаApplication FormatMuhammad ALI NoorОценок пока нет
- Introduction To Screw GaugeДокумент2 страницыIntroduction To Screw GaugeMuhammad ALI Noor100% (1)
- GoДокумент5 страницGoMuhammad ALI NoorОценок пока нет
- Alw Effective Listening Powerpoint Draft Dec30Документ31 страницаAlw Effective Listening Powerpoint Draft Dec30Muhammad ALI NoorОценок пока нет
- AnotherfileДокумент1 страницаAnotherfileMuhammad ALI NoorОценок пока нет
- CPD Precision Maintenance CultureДокумент1 страницаCPD Precision Maintenance CultureMuhammad ALI NoorОценок пока нет
- Title Page 786 PDFДокумент1 страницаTitle Page 786 PDFMuhammad ALI NoorОценок пока нет
- This Is Very Important File and A New FileДокумент1 страницаThis Is Very Important File and A New FileMuhammad ALI NoorОценок пока нет
- VVP Engineering College: Assignment 2Документ12 страницVVP Engineering College: Assignment 2Fake 1Оценок пока нет
- Financial Auditor Job DescriptionДокумент8 страницFinancial Auditor Job Descriptionfinancemanagement702Оценок пока нет
- Hanro Tools Incorporation Delhi IndiaДокумент10 страницHanro Tools Incorporation Delhi IndiaHanro Tools IncorporationОценок пока нет
- P45-69Z V3.0 Schematic DiagramДокумент10 страницP45-69Z V3.0 Schematic DiagramAhmed El SharkawyОценок пока нет
- Fresh Water GeneratorДокумент48 страницFresh Water GeneratorTarek Ashry100% (2)
- NIC Components NTC-T SeriesДокумент10 страницNIC Components NTC-T SeriesNICCompОценок пока нет
- Power Tool Switches: Catalog 1308650 Issued 1-01Документ18 страницPower Tool Switches: Catalog 1308650 Issued 1-01Gamal AhmadОценок пока нет
- Aluminium - Copper AlloysДокумент3 страницыAluminium - Copper AlloysRex RusselОценок пока нет
- Ricoh Shotmaster ZoomДокумент17 страницRicoh Shotmaster Zoommanana mappleОценок пока нет
- Roof Manual p10Документ1 страницаRoof Manual p10AllistairОценок пока нет
- Resun Price List Solar Panel-20211227Документ1 страницаResun Price List Solar Panel-20211227Nemesu LorentОценок пока нет
- 9.shift RegistersДокумент36 страниц9.shift RegistersJagan GNОценок пока нет
- Scania Jenerator DC1372A - 438-487kW PDFДокумент2 страницыScania Jenerator DC1372A - 438-487kW PDFMehmet ErenОценок пока нет
- Makalah Program PDFДокумент10 страницMakalah Program PDFIvanFolkОценок пока нет
- Catalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFДокумент52 страницыCatalogo. Aparatos de Maniobra y Proteccion - Sirius. Siemens PDFPedro MalpicaОценок пока нет
- Steel Erection Code of PracticeДокумент94 страницыSteel Erection Code of Practicedadz mingiОценок пока нет
- Us 8466302Документ11 страницUs 8466302Widya Isti AriantiОценок пока нет
- Raymond Scott - Cindy ElectroniumДокумент2 страницыRaymond Scott - Cindy ElectroniumJen HillОценок пока нет
- Full Download Book Power Electronics Motor Drive Systems Fundamentals Experiments and Applications PDFДокумент41 страницаFull Download Book Power Electronics Motor Drive Systems Fundamentals Experiments and Applications PDFrichard.desouza769100% (10)
- Orca Share Media1541759628568 PDFДокумент12 страницOrca Share Media1541759628568 PDFJuneNeilBalacuitОценок пока нет
- Table StructureДокумент180 страницTable StructureVictor PathakОценок пока нет
- Urethane UB-7 Catalog 2013Документ32 страницыUrethane UB-7 Catalog 2013yfontalvОценок пока нет
- E2186 Certif Conformidad - TomasДокумент6 страницE2186 Certif Conformidad - TomasFRANCISCOОценок пока нет
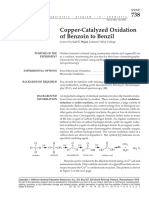
- Copperacetate Ammonium Nitrate Oxidation of Benzoin To BenzilДокумент12 страницCopperacetate Ammonium Nitrate Oxidation of Benzoin To BenzilDillon TrinhОценок пока нет
- Ryobi RLT254CDSO User ManualДокумент48 страницRyobi RLT254CDSO User ManualPaul WilsonОценок пока нет
- DDC Brochure 2021 - DigitalДокумент4 страницыDDC Brochure 2021 - DigitalJonathan MooreОценок пока нет
- SJ-20121112095141-003-LTE (V3.10.10) Alarm Handling (FDD) PDFДокумент338 страницSJ-20121112095141-003-LTE (V3.10.10) Alarm Handling (FDD) PDFRahul SharmaОценок пока нет
- Pre Requisites For Project ImplementationДокумент3 страницыPre Requisites For Project ImplementationTage NobinОценок пока нет
- TransformerДокумент14 страницTransformerNegrea Cristian0% (3)
- Review B4C Jace4865 Boron Carbide Structure Properties and Stability Under StressДокумент24 страницыReview B4C Jace4865 Boron Carbide Structure Properties and Stability Under StressAlexandru PrisecaruОценок пока нет