Вам также может понравиться
- Systems of Linear EquationsДокумент82 страницыSystems of Linear Equationsmatematica1319Оценок пока нет
- System of Linear EquationsДокумент37 страницSystem of Linear EquationsHucen Nashyd MohamedОценок пока нет
- Digital Booklet - HoneymoonДокумент16 страницDigital Booklet - HoneymoonOsmar Matadamas100% (4)
- Notes About Numerical Methods With MatlabДокумент50 страницNotes About Numerical Methods With MatlabhugocronyОценок пока нет
- Three Variable SolutionДокумент8 страницThree Variable Solutionmech_lalit2k77856Оценок пока нет
- 1st Summative Test in General MathematicsДокумент1 страница1st Summative Test in General MathematicsDoone Heart Santander CabuguasОценок пока нет
- HRA2 Service ManualДокумент59 страницHRA2 Service ManualuserrnОценок пока нет
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"От EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Рейтинг: 2.5 из 5 звезд2.5/5 (2)
- Solving Equations with MATLAB (Taken from the Book "MATLAB for Beginners: A Gentle Approach")От EverandSolving Equations with MATLAB (Taken from the Book "MATLAB for Beginners: A Gentle Approach")Рейтинг: 3.5 из 5 звезд3.5/5 (11)
- Matlab Tutorial of Modelling of A Slider Crank MechanismДокумент14 страницMatlab Tutorial of Modelling of A Slider Crank MechanismTrolldaddyОценок пока нет
- Solving Linear by MATLABДокумент36 страницSolving Linear by MATLABnana fatharaniОценок пока нет
- Cornell CatalogДокумент707 страницCornell CatalogVictor VignolaОценок пока нет
- Aeronautics: Aeronautical Calculations: What's With All Those Coefficients Anyway?Документ2 страницыAeronautics: Aeronautical Calculations: What's With All Those Coefficients Anyway?Baldev RamОценок пока нет
- Protect-RCS-O&M Manual PDFДокумент53 страницыProtect-RCS-O&M Manual PDFsureshnfcl0% (1)
- MAE 200A - Homework Set #1Документ2 страницыMAE 200A - Homework Set #1vsauerОценок пока нет
- Iot Early Flood Detection & AvoidanceДокумент43 страницыIot Early Flood Detection & Avoidance8051projects83% (6)
- Introduction To MATLAB For Engineers, Third EditionДокумент49 страницIntroduction To MATLAB For Engineers, Third EditionSeyed SadeghОценок пока нет
- CH 11 PowerpointДокумент62 страницыCH 11 PowerpointRolando QuintanaОценок пока нет
- Systems of Linear Equations Math 130 Linear AlgebraДокумент4 страницыSystems of Linear Equations Math 130 Linear AlgebraCody SageОценок пока нет
- Equations 1. The Equation Formula: Mathg12 Euclid Stage 3 Class 1 NotesДокумент8 страницEquations 1. The Equation Formula: Mathg12 Euclid Stage 3 Class 1 NotesHappy DolphinОценок пока нет
- Algebraic Solution of Simultaneous Linear Equations PDFДокумент11 страницAlgebraic Solution of Simultaneous Linear Equations PDFAmeer AliОценок пока нет
- Linear Algebra Lesson 1Документ16 страницLinear Algebra Lesson 1Mab ShiОценок пока нет
- LESSON 5 Systems of Linear EquationsДокумент16 страницLESSON 5 Systems of Linear EquationsMa RiaОценок пока нет
- EAA111-Chapter 5Документ63 страницыEAA111-Chapter 5vincentch96Оценок пока нет
- Math 154:: Elementary Algebra: Chapter 5 - Systems of Linear Equations in Two-VariablesДокумент11 страницMath 154:: Elementary Algebra: Chapter 5 - Systems of Linear Equations in Two-Variableshn317Оценок пока нет
- Systems of Linear EquationsДокумент15 страницSystems of Linear EquationsjhoyОценок пока нет
- Ch1 Numerical Methods Lecture NotesДокумент10 страницCh1 Numerical Methods Lecture NotesAbdiqani Mohamed AdanОценок пока нет
- Solving Systems of Equations in MathcadДокумент11 страницSolving Systems of Equations in MathcadJason HernandezОценок пока нет
- Systems of Linear Equations in Three Variables Extra CreditДокумент7 страницSystems of Linear Equations in Three Variables Extra CreditFleur BurnsОценок пока нет
- ch08 2Документ18 страницch08 2Ajuchán EliezerОценок пока нет
- Equation MatrixДокумент24 страницыEquation MatrixShubham YadavОценок пока нет
- Paul's Online Notes: Ax + by P CX + Dy QДокумент4 страницыPaul's Online Notes: Ax + by P CX + Dy QbenderОценок пока нет
- Lab # 04 Regd. # 10 EE 24: The Gauss-Seidel Iterative MethodДокумент4 страницыLab # 04 Regd. # 10 EE 24: The Gauss-Seidel Iterative MethodRana Umar FarooqОценок пока нет
- Matlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsДокумент14 страницMatlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsAli AhmadОценок пока нет
- The Sysytem of EquationsДокумент24 страницыThe Sysytem of Equationsasadfarooqi4102Оценок пока нет
- Least-Square MethodДокумент32 страницыLeast-Square MethodSantiago SarmientoОценок пока нет
- PDF CropДокумент2 страницыPDF Cropt0xic.369xОценок пока нет
- Numerical Solution of Ordinary Differential Equations Part 3 - System of EquationsДокумент24 страницыNumerical Solution of Ordinary Differential Equations Part 3 - System of EquationsMelih TecerОценок пока нет
- Linear Equation Dinesh KumarДокумент20 страницLinear Equation Dinesh KumarVibhu GoelОценок пока нет
- Module 1a Two-VariablesДокумент11 страницModule 1a Two-VariablesisaganiОценок пока нет
- HeeДокумент7 страницHeeWorse To Worst SatittamajitraОценок пока нет
- Solving Simultaneous Linear Equations: Presented By: Soha Tharwat Aly Abd El-Rahman Makhyoun Presented ToДокумент11 страницSolving Simultaneous Linear Equations: Presented By: Soha Tharwat Aly Abd El-Rahman Makhyoun Presented ToSoha MakhyounОценок пока нет
- B1 Lesson 8Документ14 страницB1 Lesson 8Montes Arianne A.Оценок пока нет
- Systems of Equations: SPI 3102.3.9 Solve Systems of Linear Equation/inequalities in Two VariablesДокумент25 страницSystems of Equations: SPI 3102.3.9 Solve Systems of Linear Equation/inequalities in Two VariablesIbrahim AyoubОценок пока нет
- Core 1 Chapter 06 - Notes 2023 NewДокумент13 страницCore 1 Chapter 06 - Notes 2023 Newrparmar1106Оценок пока нет
- Hidayat Kocharli 1419i IW-1Документ6 страницHidayat Kocharli 1419i IW-1Idayat KocharliОценок пока нет
- Systems of Equations U6Документ10 страницSystems of Equations U6Will NerОценок пока нет
- Simultaneous Equation SolverДокумент7 страницSimultaneous Equation Solverapi-126876773Оценок пока нет
- Algebra - Linear Systems With Two VariablesДокумент4 страницыAlgebra - Linear Systems With Two VariablesMelvin TalaveraОценок пока нет
- CB312 Ch3Документ40 страницCB312 Ch3CRAZY SportsОценок пока нет
- Linear Equations in 2 VariablesДокумент18 страницLinear Equations in 2 Variablesat4machineОценок пока нет
- ADVANCE OF SMARANDACHE APPROACH TO SOLVING SYSTEMS OF DIOPHANTlNE EQUATIONSДокумент12 страницADVANCE OF SMARANDACHE APPROACH TO SOLVING SYSTEMS OF DIOPHANTlNE EQUATIONSRyanEliasОценок пока нет
- Chapter 1Документ32 страницыChapter 1KelleyОценок пока нет
- Lecture Notes Math 307Документ181 страницаLecture Notes Math 307homopeniscuntfuck100% (1)
- Topic 5-Systems of Linear EquationsДокумент46 страницTopic 5-Systems of Linear EquationsNqobile PhokaneОценок пока нет
- 5 System of Linear EquationsДокумент10 страниц5 System of Linear EquationsAllen Kyle PrielaОценок пока нет
- Solving Systems of EquationsДокумент2 страницыSolving Systems of Equationsapi-234448837Оценок пока нет
- Chapter 6 System of Linear Equation - StudentДокумент12 страницChapter 6 System of Linear Equation - StudentaddmathkuОценок пока нет
- Advanced AlgebraДокумент20 страницAdvanced AlgebraRems RecablancaОценок пока нет
- Solving Simultaneous Linear EquationsДокумент8 страницSolving Simultaneous Linear EquationsEbookcrazeОценок пока нет
- Cramer's RuleДокумент22 страницыCramer's RuleMemyah AlОценок пока нет
- Solutions:: Equations Solution Set R (The Set of All Real Numbers) Ø (The Empty Set)Документ5 страницSolutions:: Equations Solution Set R (The Set of All Real Numbers) Ø (The Empty Set)Angela Ricaplaza ReveralОценок пока нет
- Elementary Number TheoryДокумент14 страницElementary Number TheoryWalb MoralesОценок пока нет
- Solving Systems of Equations: P P P P PДокумент5 страницSolving Systems of Equations: P P P P PMalcolmОценок пока нет
- Math1070 130notes PDFДокумент6 страницMath1070 130notes PDFPrasad KharatОценок пока нет
- Gauss EliminationДокумент12 страницGauss EliminationRavikiran ManeОценок пока нет
- Simultaneous EquationДокумент10 страницSimultaneous EquationsabbysamuraОценок пока нет
- Compiler Design QB PDFДокумент11 страницCompiler Design QB PDFvinod3457Оценок пока нет
- HornДокумент2 страницыHornvinod3457Оценок пока нет
- Unit 2Документ3 страницыUnit 2vinod3457Оценок пока нет
- Multidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)Документ12 страницMultidimensional Arrays:: 1. Explain About Multidimensional Array? (Model Question)vinod3457Оценок пока нет
- CP Student ManualДокумент125 страницCP Student Manualvinod3457Оценок пока нет
- 3G & 4G Standards: 1. Explain About Global System For Mobile (GSM)Документ8 страниц3G & 4G Standards: 1. Explain About Global System For Mobile (GSM)vinod3457Оценок пока нет
- Ertos MaterialДокумент8 страницErtos Materialvinod3457Оценок пока нет
- DISP10.LPR AbstractДокумент2 страницыDISP10.LPR Abstractvinod3457Оценок пока нет
- Trade PolicyДокумент16 страницTrade Policyvinod3457Оценок пока нет
- Anaximenes (D. 528 BCE) : 1. Doctrine of AirДокумент6 страницAnaximenes (D. 528 BCE) : 1. Doctrine of AirEvoline LimОценок пока нет
- Perkahwinan Remaja: Satu Kajian Di Kuching, Sarawak (Teenage Marriage: A Study in Kuching, Sarawak)Документ15 страницPerkahwinan Remaja: Satu Kajian Di Kuching, Sarawak (Teenage Marriage: A Study in Kuching, Sarawak)Lim Shu QingОценок пока нет
- Regenerative Desiccant Dryers: KAD, KED and KBD SeriesДокумент10 страницRegenerative Desiccant Dryers: KAD, KED and KBD SeriesNaveen KumarОценок пока нет
- Airworthiness Directive: Design Approval Holder's Name: Type/Model Designation(s)Документ4 страницыAirworthiness Directive: Design Approval Holder's Name: Type/Model Designation(s)Yuri SilvaОценок пока нет
- SCMIJ - EV Supply Chains - Final VersionДокумент43 страницыSCMIJ - EV Supply Chains - Final VersionAhmedEl-MenshawiОценок пока нет
- AnyLogic 6 System Dynamics Modeling TutorialДокумент25 страницAnyLogic 6 System Dynamics Modeling TutorialAlphonso AndrewsОценок пока нет
- GS - RS - Lite CENTUM VP Integration PackageДокумент4 страницыGS - RS - Lite CENTUM VP Integration PackageVijayОценок пока нет
- Conventional As Well As Emerging Arsenic Removal Technologies - A Critical ReviewДокумент21 страницаConventional As Well As Emerging Arsenic Removal Technologies - A Critical ReviewQuea ApurimacОценок пока нет
- Username: Password:: Sign Up HelpДокумент5 страницUsername: Password:: Sign Up Helpanon-846946Оценок пока нет
- Participatory Irrigation Sector Project (Pisp)Документ35 страницParticipatory Irrigation Sector Project (Pisp)Maman Rustaman100% (1)
- Using Engineering and Management Principles For Better Patient Care Nikhil BalakrishnanДокумент345 страницUsing Engineering and Management Principles For Better Patient Care Nikhil BalakrishnanYendy ReyesОценок пока нет
- The Philips PavilionДокумент12 страницThe Philips PavilionNiket PaiОценок пока нет
- Topographic Map of HagansportДокумент1 страницаTopographic Map of HagansportHistoricalMapsОценок пока нет
- Ise Online Access For Introduction To Operations Research 11Th Edition Hillier Full ChapterДокумент51 страницаIse Online Access For Introduction To Operations Research 11Th Edition Hillier Full Chapterdarrell.berry639100% (4)
- GulfSea Turbine Oil Series PDFДокумент2 страницыGulfSea Turbine Oil Series PDFObydur RahmanОценок пока нет
- Pengaruh Skarifikasi Dan Hormon Giberelin (Ga) Terhadap Daya Kecambah Dan Pertumbuhan Bibit Palem Putri (Veitchia Merillii)Документ8 страницPengaruh Skarifikasi Dan Hormon Giberelin (Ga) Terhadap Daya Kecambah Dan Pertumbuhan Bibit Palem Putri (Veitchia Merillii)Adi IndraОценок пока нет
- English 3 Lesson PlanДокумент9 страницEnglish 3 Lesson PlanRegine MalanaОценок пока нет
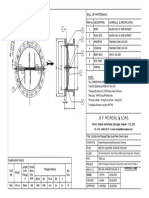
- Dual Plate 800 NB-ModelДокумент1 страницаDual Plate 800 NB-ModelTanmoy DuttaОценок пока нет
- Focus ForecastingДокумент4 страницыFocus ForecastingVedant MishraОценок пока нет
- Color BookДокумент24 страницыColor Booksd02Оценок пока нет
- Tle CSS9 Q3 M6Документ13 страницTle CSS9 Q3 M6caberjhandereugeneОценок пока нет
- Pseudo-Static Master-Slave Match-Line Scheme For Sustainable-Performance and Energy-Efficient Content Addressable MemoryДокумент4 страницыPseudo-Static Master-Slave Match-Line Scheme For Sustainable-Performance and Energy-Efficient Content Addressable MemoryTajbia HossainОценок пока нет
- Power Imbalance Issues in AdvertisingДокумент22 страницыPower Imbalance Issues in AdvertisingIonut IugaОценок пока нет