Вам также может понравиться
- O.S chapter 2Документ46 страницO.S chapter 2dejenehundaol91Оценок пока нет
- bce2bb9c-667e-4c4c-afc5-4f055320e87fДокумент11 страницbce2bb9c-667e-4c4c-afc5-4f055320e87fbhoomikagopal308Оценок пока нет
- Operating System ClassnotesДокумент4 страницыOperating System Classnotesethan bella meemОценок пока нет
- Operating Systems To Solve Problems in Software, Hardware and Peripheral DevicesДокумент14 страницOperating Systems To Solve Problems in Software, Hardware and Peripheral DevicesmajedОценок пока нет
- OSДокумент34 страницыOSRajuОценок пока нет
- OS Chapter One and Two Sample Questions - 2Документ31 страницаOS Chapter One and Two Sample Questions - 2Yaikob KebedeОценок пока нет
- Process SchedulingДокумент10 страницProcess SchedulingHabesha CryptoОценок пока нет
- Os Unit-2Документ9 страницOs Unit-2Sai balakrishnaОценок пока нет
- CrackIT OS Guide: Key Concepts in 40 CharactersДокумент48 страницCrackIT OS Guide: Key Concepts in 40 CharactersHARESHОценок пока нет
- Process Management: Name: Imran Ahsanullah Roll#: sp20mcs0023 Name: Rahoul Roll #: Sp20-Bsse-1025Документ20 страницProcess Management: Name: Imran Ahsanullah Roll#: sp20mcs0023 Name: Rahoul Roll #: Sp20-Bsse-1025aneela ahsanОценок пока нет
- 3rd Session Unit IVДокумент26 страниц3rd Session Unit IVKushal krishnanОценок пока нет
- OSY MICROДокумент12 страницOSY MICROatul gaikwadОценок пока нет
- Ch. 4 ... Part - 1Документ52 страницыCh. 4 ... Part - 1VОценок пока нет
- Operating Systems: Exercise 2Документ11 страницOperating Systems: Exercise 2abrar aliОценок пока нет
- Unit 2Документ123 страницыUnit 2Alwin HiltonОценок пока нет
- Process SchedullingДокумент4 страницыProcess SchedullingzamakbОценок пока нет
- Os Process ManagementДокумент25 страницOs Process ManagementVishal Yadav Xll CОценок пока нет
- Unit 3 - Operating System - WWW - Rgpvnotes.inДокумент38 страницUnit 3 - Operating System - WWW - Rgpvnotes.inGirraj DohareОценок пока нет
- OS Concepts Ch 3: Process ManagementДокумент21 страницаOS Concepts Ch 3: Process ManagementRuchi Tuli WadhwaОценок пока нет
- CH 3 (Processes)Документ12 страницCH 3 (Processes)Muhammad ImranОценок пока нет
- DAC - COS - Day 4Документ77 страницDAC - COS - Day 4kovol29478Оценок пока нет
- PROCESS NotesДокумент6 страницPROCESS NotesBhomik-116Оценок пока нет
- Ch. 2 ... Part - 1Документ31 страницаCh. 2 ... Part - 1VОценок пока нет
- Slides Ch2 Process ManagementДокумент41 страницаSlides Ch2 Process ManagementAbuky Ye AmanОценок пока нет
- CPU Scheduling Algorithms ExplainedДокумент40 страницCPU Scheduling Algorithms ExplainedMickОценок пока нет
- OS Unit - 2Документ23 страницыOS Unit - 2ZINKAL PATELОценок пока нет
- OS TT SolvedДокумент13 страницOS TT Solvedfofini3433Оценок пока нет
- Os Operating SystemДокумент8 страницOs Operating SystemanithaОценок пока нет
- Group Members: 1. Shucayb Mohamed Ismail 2. Abdihafid Ismail Salad 3. Nimo Ahmed Hassan 4. Nimo Khadar AhmedДокумент20 страницGroup Members: 1. Shucayb Mohamed Ismail 2. Abdihafid Ismail Salad 3. Nimo Ahmed Hassan 4. Nimo Khadar Ahmedabdi hafidОценок пока нет
- Lecture 6, OS PDFДокумент7 страницLecture 6, OS PDFMaria Akter LuthfaОценок пока нет
- OS Chapter 3Документ15 страницOS Chapter 3root18Оценок пока нет
- Operating Systems Week6Документ38 страницOperating Systems Week6Yano NettleОценок пока нет
- Chapter 5 - CPU Scheduling CPU and I/O Burst CycleДокумент21 страницаChapter 5 - CPU Scheduling CPU and I/O Burst CyclesatiskmОценок пока нет
- OS Chapter TwoДокумент13 страницOS Chapter Twochalie tarekegnОценок пока нет
- OS Process Management TechniquesДокумент30 страницOS Process Management TechniquesPrakrti MankarОценок пока нет
- Unit 2Документ60 страницUnit 2gdzqxjgomvnldysggkОценок пока нет
- 3.1 Processes - Concept, Process, State, Process Control BlockДокумент11 страниц3.1 Processes - Concept, Process, State, Process Control BlockHarish KhanОценок пока нет
- CHP 2 Process ManagementДокумент30 страницCHP 2 Process ManagementAditiОценок пока нет
- CPU scheduling in iOS (DescriptionДокумент3 страницыCPU scheduling in iOS (DescriptionPiyumi SandarekaОценок пока нет
- Operating System Chapter 4Документ7 страницOperating System Chapter 4Hafsa SafdarОценок пока нет
- Operating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Документ5 страницOperating Systems 8th Edition Cheat Sheet (Up To Chapter 6)Michael Beswick0% (1)
- Scheduling Concepts: I) Increased CPU Utilization Ii) Higher ThroughputДокумент12 страницScheduling Concepts: I) Increased CPU Utilization Ii) Higher ThroughputHikmatullah SaqibОценок пока нет
- Unit II CAL 817 Operating System - 231003 - 130433Документ15 страницUnit II CAL 817 Operating System - 231003 - 130433RAZEB PATHANОценок пока нет
- Process (Or Task)Документ20 страницProcess (Or Task)Monu ChouhanОценок пока нет
- Process SchedulingДокумент5 страницProcess SchedulingKnoel Gen GutierrezОценок пока нет
- Process Scheduling ReportДокумент6 страницProcess Scheduling ReportDevang KhandelwalОценок пока нет
- OS Mini ProjectДокумент21 страницаOS Mini ProjectDarrel Soo Pheng Kian50% (2)
- Process Concepts and Scheduling ExplainedДокумент44 страницыProcess Concepts and Scheduling ExplainedSarah AliОценок пока нет
- Process and ThreadsДокумент11 страницProcess and ThreadsLouie Gene SanquiОценок пока нет
- CPU Scheduling in Operating SystemsДокумент8 страницCPU Scheduling in Operating SystemsIshaan SinghОценок пока нет
- OS 3 CPU IO SchedulingДокумент30 страницOS 3 CPU IO SchedulingRitesh KumarОценок пока нет
- Unit-4 - KOE062 Embededded System MaterialsДокумент38 страницUnit-4 - KOE062 Embededded System MaterialsRishabh PrasadОценок пока нет
- Scheduling AlgorithmДокумент44 страницыScheduling AlgorithmGLENN ABACAHINОценок пока нет
- Scheduling 2Документ17 страницScheduling 2Debabrata DevОценок пока нет
- Unit 5Документ45 страницUnit 5Abhinav JaiswalОценок пока нет
- Module 8 Process ManagementДокумент4 страницыModule 8 Process ManagementnatsuОценок пока нет
- PROCESS MANAGEMENT: COORDINATION AND SYNCHRONIZATIONДокумент97 страницPROCESS MANAGEMENT: COORDINATION AND SYNCHRONIZATIONDuy Bùi LêОценок пока нет
- OS Unit-2 NotesДокумент29 страницOS Unit-2 Notesanjali sowmyaОценок пока нет
- SAS Programming Guidelines Interview Questions You'll Most Likely Be AskedОт EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be AskedОценок пока нет
- IT Disaster Recovery Planning ChecklistДокумент2 страницыIT Disaster Recovery Planning ChecklistYawe Kizito Brian PaulОценок пока нет
- Oracle 1z0-497 exam guide with 91% successДокумент65 страницOracle 1z0-497 exam guide with 91% successprem kumarОценок пока нет
- Gda Business: Assignment 3 INF10003 Student: Bui Vu Khanh Trang-Swh00554Документ17 страницGda Business: Assignment 3 INF10003 Student: Bui Vu Khanh Trang-Swh00554Vũ Khánh Trang BùiОценок пока нет
- B, 40,41, Case 2 Goodyear, Jea, Osumc and MonsantoДокумент10 страницB, 40,41, Case 2 Goodyear, Jea, Osumc and MonsantoSuhel PathanОценок пока нет
- Introduction To Hadoop and Mapreduce - VM SetupДокумент4 страницыIntroduction To Hadoop and Mapreduce - VM SetupDavid LlanesОценок пока нет
- DMC 550Документ45 страницDMC 550Pandu Sandi PratamaОценок пока нет
- Metastat Command Shows Soft Partition in Errored StateДокумент3 страницыMetastat Command Shows Soft Partition in Errored StatecresmakОценок пока нет
- Netpro Operation Manual 2k0 4k0 VaДокумент20 страницNetpro Operation Manual 2k0 4k0 VaDanny Dan100% (2)
- Chap1 IstqbДокумент42 страницыChap1 IstqbAnil Nag100% (2)
- Pa3X Factory ResetДокумент12 страницPa3X Factory ResetAnonymous qz5pEMh44Оценок пока нет
- Croatian Mobility Startup Greyp Bikes Raises FundsДокумент18 страницCroatian Mobility Startup Greyp Bikes Raises FundsDrazenMarjanovicОценок пока нет
- ETP48200-C5E1 Embedded Power User Manual (SMU02C)Документ101 страницаETP48200-C5E1 Embedded Power User Manual (SMU02C)RicardoCastroОценок пока нет
- 1 Ai Chapter-One Edited14Документ53 страницы1 Ai Chapter-One Edited14Miraj SherifОценок пока нет
- Plannerplus: Automated Capacity Management For Optimized Network DesignsДокумент4 страницыPlannerplus: Automated Capacity Management For Optimized Network DesignsPrasanna GanesanОценок пока нет
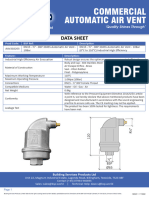
- BSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022Документ1 страницаBSP - Commercial AAV - 10bar - DataSheet - V1.1 - 11-2022j.iqubalОценок пока нет
- Toshiba NB250-107 - Product..Документ2 страницыToshiba NB250-107 - Product..gabriel_danut100% (1)
- ECE 124 Week 7 ReviewДокумент55 страницECE 124 Week 7 Reviewjahnavi thotaОценок пока нет
- F5 6000J3038F16GX2 TZ5NДокумент2 страницыF5 6000J3038F16GX2 TZ5Nw800w810Оценок пока нет
- Harris Ts100 User ManualДокумент24 страницыHarris Ts100 User ManualMiguel Alfonso Ruiz MendezОценок пока нет
- MySQL Triggers GuideДокумент21 страницаMySQL Triggers Guidesatya prakash singhОценок пока нет
- DBL 5307Документ14 страницDBL 5307Marko SamardžićОценок пока нет
- Unit 3 Working With XML Introduction To XMLДокумент41 страницаUnit 3 Working With XML Introduction To XMLAishwaryaОценок пока нет
- MPPT Solar Charge Controller: Tracer A SeriesДокумент4 страницыMPPT Solar Charge Controller: Tracer A Seriesfingkan fitriyantiОценок пока нет
- Crash Request FormДокумент1 страницаCrash Request FormKim CrosbyОценок пока нет
- Ti Sns50-Hba0-S01 1034097Документ8 страницTi Sns50-Hba0-S01 1034097zaleksОценок пока нет
- Distributor Installation: Crankshaft Position Sensor RemovalДокумент2 страницыDistributor Installation: Crankshaft Position Sensor RemovalKeyboardMan1960Оценок пока нет
- 2015 AREMA MRE Chapter 33 Power SupplyДокумент194 страницы2015 AREMA MRE Chapter 33 Power SupplyIulianОценок пока нет
- Cigré2016 Experiencesandinnovationsinpowertransformershort Circuitcurrentwithstandtesting A2 304Документ11 страницCigré2016 Experiencesandinnovationsinpowertransformershort Circuitcurrentwithstandtesting A2 304cisnatelОценок пока нет
- Micro Focus®Документ6 страницMicro Focus®pncsatishОценок пока нет
- KD-208 User ManualДокумент17 страницKD-208 User ManualmazacotesОценок пока нет