Вам также может понравиться
- A-Z Windows CMD Commands ListДокумент17 страницA-Z Windows CMD Commands ListAmer Gonzales0% (2)
- Oracle Background ProcessesДокумент9 страницOracle Background ProcessesAmalraj IrudayamaniОценок пока нет
- Chef TutorialДокумент106 страницChef TutorialmedeirostalkОценок пока нет
- PE File Format Compendium 1.1 (By Goppit, ARTeam)Документ59 страницPE File Format Compendium 1.1 (By Goppit, ARTeam)MechDR100% (1)
- ASM LUN Creation On Multiple NodesДокумент3 страницыASM LUN Creation On Multiple Nodesprince264Оценок пока нет
- Schaum's Easy Outline: Programming with C++От EverandSchaum's Easy Outline: Programming with C++Рейтинг: 3.5 из 5 звезд3.5/5 (4)
- Concurrency: Deadlock and Starvation: Operating Systems: Internals and Design PrinciplesДокумент68 страницConcurrency: Deadlock and Starvation: Operating Systems: Internals and Design PrinciplesSudha PoojaryОценок пока нет
- 04 Task Performance 1 BALTДокумент2 страницы04 Task Performance 1 BALTRegaliaОценок пока нет
- Alvarado 04 TP Concurrency DeadlocksДокумент2 страницыAlvarado 04 TP Concurrency DeadlocksXeb VlogsОценок пока нет
- Task Performance OSДокумент4 страницыTask Performance OSSi gab po ito hahaОценок пока нет
- Task-Performance PlatДокумент2 страницыTask-Performance Platclarencejay austriaОценок пока нет
- Task Performance Concurrency & DeadlocksДокумент2 страницыTask Performance Concurrency & DeadlocksElijah RileyОценок пока нет
- Concurrency: Deadlock and Starvation: Ninth Edition, Global Edition by William StallingsДокумент69 страницConcurrency: Deadlock and Starvation: Ninth Edition, Global Edition by William StallingsKaisoo KadiОценок пока нет
- Roldan 04 TP 1Документ2 страницыRoldan 04 TP 1Daniela RoldanОценок пока нет
- Chapter 6 Concurrency For Deadlock and StarvationДокумент69 страницChapter 6 Concurrency For Deadlock and StarvationunipetОценок пока нет
- Task Performance DeadlocksДокумент8 страницTask Performance Deadlocksandres tabaldoОценок пока нет
- Plattech TPДокумент4 страницыPlattech TPLance BatacОценок пока нет
- 04 Task Performance PlatformДокумент2 страницы04 Task Performance PlatformKarldiosel ombidОценок пока нет
- DeadlocksДокумент29 страницDeadlocksabaid daudОценок пока нет
- OPERATING SYSTEMS - Chapter DeadLockДокумент39 страницOPERATING SYSTEMS - Chapter DeadLockk201610Оценок пока нет
- Kent Academic Repository: Full Text Document PDFДокумент19 страницKent Academic Repository: Full Text Document PDFrobbyyuОценок пока нет
- Joriel B 04 Task Performance 1 - ARGДокумент3 страницыJoriel B 04 Task Performance 1 - ARGJ MoranОценок пока нет
- 6.13 Key Terms, Review Questions, and ProblemsДокумент7 страниц6.13 Key Terms, Review Questions, and ProblemsSpencer KariukiОценок пока нет
- Deadlock Prevention, Avoidance, and DetectionДокумент29 страницDeadlock Prevention, Avoidance, and DetectionSayandeepОценок пока нет
- Deadlock Prevention, Avoidance, and DetectionДокумент29 страницDeadlock Prevention, Avoidance, and DetectionBapuji ValabojuОценок пока нет
- Deadlock Exercise & AnswerДокумент3 страницыDeadlock Exercise & AnswerNg JZОценок пока нет
- Process Synchronization-Race Conditions - Critical Section Problem - Peterson's SolutionДокумент44 страницыProcess Synchronization-Race Conditions - Critical Section Problem - Peterson's SolutionAlthaf AsharafОценок пока нет
- Deadlock Prevention, Avoidance, and DetectionДокумент29 страницDeadlock Prevention, Avoidance, and DetectionSaumya BhardwajОценок пока нет
- Deadlock Prevention, Avoidance, and DetectionДокумент29 страницDeadlock Prevention, Avoidance, and DetectionharsimranОценок пока нет
- Quiz2 Cs 143a - Principles of Operating SystemsДокумент3 страницыQuiz2 Cs 143a - Principles of Operating SystemsfestisioОценок пока нет
- Ln8-Deadlock 2pp PDFДокумент15 страницLn8-Deadlock 2pp PDFSivaVigneshОценок пока нет
- Chapter 4 DeadlockДокумент24 страницыChapter 4 DeadlockNasis DerejeОценок пока нет
- Deadlock Prevention, Avoidance, and DetectionДокумент29 страницDeadlock Prevention, Avoidance, and DetectionUmang AkashОценок пока нет
- Deadlock Prevention, Avoidance, and DetectionДокумент29 страницDeadlock Prevention, Avoidance, and DetectionPranay Kumar PendotaОценок пока нет
- Sheet7 2024Документ4 страницыSheet7 2024giger58166Оценок пока нет
- Morales BSIT2 1AA PlatTech 04TaskPerformance1Документ2 страницыMorales BSIT2 1AA PlatTech 04TaskPerformance1Hazzel GilveroОценок пока нет
- The Project NetworkДокумент23 страницыThe Project NetworkTarek OfficialОценок пока нет
- Methods For Handling Deadlocks: Mutual Exclusion Hold and WaitДокумент7 страницMethods For Handling Deadlocks: Mutual Exclusion Hold and WaitSajid UmarОценок пока нет
- Deadlocks-Distributed SystemДокумент25 страницDeadlocks-Distributed SystemShankar PasurОценок пока нет
- 5TH Operating System NotesДокумент10 страниц5TH Operating System NotesNeha Chinni50% (2)
- Ch6 SynchronizationДокумент43 страницыCh6 Synchronizationمحمد اليوسفОценок пока нет
- Lecture 06Документ44 страницыLecture 06gtaclubОценок пока нет
- 06 DeadlocksДокумент56 страниц06 DeadlocksDhruvОценок пока нет
- Week 2 ExercisesДокумент3 страницыWeek 2 Exerciseshyperborea711Оценок пока нет
- Unit 2 (New Syll)Документ31 страницаUnit 2 (New Syll)Harish HariОценок пока нет
- Manalo 04 Task Performance 1 6 2 1Документ4 страницыManalo 04 Task Performance 1 6 2 1Gelo MoloОценок пока нет
- 1 Interprocess SynchronizationДокумент91 страница1 Interprocess SynchronizationSoumya VijoyОценок пока нет
- OSS - Lecture 03 - Deadlock Concurrency Control - L01Документ44 страницыOSS - Lecture 03 - Deadlock Concurrency Control - L01Afiq AimanОценок пока нет
- DEADLOCK DsatmДокумент13 страницDEADLOCK DsatmM.A rajaОценок пока нет
- Lec18-Synchronization Issues-OnlineДокумент17 страницLec18-Synchronization Issues-Onlinefaheem tariqОценок пока нет
- Priority Mutual Exclusion - Specification and AlgorithmДокумент14 страницPriority Mutual Exclusion - Specification and AlgorithmHrishikesh BorkarОценок пока нет
- Numerical Qustions in SEДокумент5 страницNumerical Qustions in SEBiswajit MishraОценок пока нет
- Module 1Документ72 страницыModule 1Ashley MartinОценок пока нет
- 1918823Документ38 страниц1918823Ms.R.Thillaikarasi CSE DepartmentОценок пока нет
- CSE 1101 WkSheet 2Документ2 страницыCSE 1101 WkSheet 2AarifОценок пока нет
- Appendix P ProcedurecontrolДокумент9 страницAppendix P ProcedurecontrolbojankaОценок пока нет
- Chapter 6 Developing A Project PlanДокумент28 страницChapter 6 Developing A Project PlanPaola CayabyabОценок пока нет
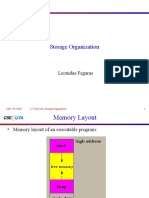
- Storage Organization: Leonidas FegarasДокумент16 страницStorage Organization: Leonidas FegarasNaveen Kumaar V VОценок пока нет
- 7 DeadlocksДокумент43 страницы7 DeadlocksVerma MuleshОценок пока нет
- Deadlocks:: Group 3 Gabriel Zialcita Ralph Regan Choa Elmer Soria Marc Doroja Nikko Reyes Enrique MalonzoДокумент59 страницDeadlocks:: Group 3 Gabriel Zialcita Ralph Regan Choa Elmer Soria Marc Doroja Nikko Reyes Enrique Malonzopkmn_dejesus5635Оценок пока нет
- PplnotesДокумент8 страницPplnotespbsiddharthaОценок пока нет
- CS204-OS-module 3Документ14 страницCS204-OS-module 3Abitha SajanОценок пока нет
- OS Deadlock (Chapter 8)Документ39 страницOS Deadlock (Chapter 8)ekiholoОценок пока нет
- Chapter 7 DeadlockДокумент43 страницыChapter 7 DeadlockWajeeha NizamiОценок пока нет
- Filesystem - How To Configure Systemd To Ignore Fstab Drive Mount Failures? - Ask UbuntuДокумент2 страницыFilesystem - How To Configure Systemd To Ignore Fstab Drive Mount Failures? - Ask UbuntuASОценок пока нет
- How To Install MongoDB On Ubuntu 18.04 - DigitalOceanДокумент1 страницаHow To Install MongoDB On Ubuntu 18.04 - DigitalOceanYusto Malik OmondiОценок пока нет
- CPU Scheduling: CS 447 Monday 3:30-5:00 Tuesday 2:00-3:30Документ35 страницCPU Scheduling: CS 447 Monday 3:30-5:00 Tuesday 2:00-3:30mahimaОценок пока нет
- Chapter II. Process Management: 2.1 OverviewДокумент17 страницChapter II. Process Management: 2.1 OverviewRediet BadieОценок пока нет
- 2023 03 11bejzДокумент4 страницы2023 03 11bejzWilliam bordes courtoisОценок пока нет
- Sift Cheatsheet PDFДокумент2 страницыSift Cheatsheet PDFShawlar NaphewОценок пока нет
- MT6737M Android ScatterДокумент8 страницMT6737M Android ScatterSixto Guardo MarmolОценок пока нет
- LogДокумент91 страницаLogAlex Jr TorresОценок пока нет
- Assignment 3Документ5 страницAssignment 3Rizwan NaeemОценок пока нет
- CVE 2017 11176 A Step by Step Linux Kernel Exploitation Part 2Документ32 страницыCVE 2017 11176 A Step by Step Linux Kernel Exploitation Part 2Lincoln DiasОценок пока нет
- The Git Version Control SystemДокумент20 страницThe Git Version Control SystemHriman MukherjeeОценок пока нет
- 10g Installation Steps On LINUXДокумент6 страниц10g Installation Steps On LINUXsunnyОценок пока нет
- DropboxДокумент5 страницDropboxAna-Maria MihaelaОценок пока нет
- Error LogДокумент4 страницыError LogSyalom SibОценок пока нет
- Display PDFДокумент1 462 страницыDisplay PDFGaurav Garg100% (1)
- Ahmadu Bello University Zaria: COSC 801: Operating System Assignment REG: P18PSCS8037Документ4 страницыAhmadu Bello University Zaria: COSC 801: Operating System Assignment REG: P18PSCS8037JoshuaОценок пока нет
- Multi Threading Interview Questions PDFДокумент4 страницыMulti Threading Interview Questions PDFSatish BabuОценок пока нет
- System Calls Lab ManualДокумент8 страницSystem Calls Lab Manualrose marine100% (1)
- 300-100.exam.35q: Number: 300-100 Passing Score: 800 Time Limit: 120 Min File Version: 1Документ18 страниц300-100.exam.35q: Number: 300-100 Passing Score: 800 Time Limit: 120 Min File Version: 1sergiutОценок пока нет
- IT215: Systems Software, Winter 2014-15 Second In-Sem Exam (2 Hours)Документ10 страницIT215: Systems Software, Winter 2014-15 Second In-Sem Exam (2 Hours)Mettl SupportОценок пока нет
- IPMI Firmware UpdateДокумент12 страницIPMI Firmware UpdateAnonymous JF3VXrОценок пока нет
- Ghost by External Hard Disk - 1Документ10 страницGhost by External Hard Disk - 1Nazar AbbasОценок пока нет
- OS - Module 2 - Operating System StructureДокумент75 страницOS - Module 2 - Operating System StructureMuhammad Khaleel AfzalОценок пока нет
- MIT6 004s09 Tutor20 Sol PDFДокумент15 страницMIT6 004s09 Tutor20 Sol PDFCHANDRA MOULI MARTHYОценок пока нет
- Eee ZG512-L2Документ39 страницEee ZG512-L2Anonymous bHoj97l4Оценок пока нет