Вам также может понравиться
- Eee AДокумент6 страницEee ASundaravadivel ArumugamОценок пока нет
- Image Processing To Manipulate RGB Values Using Verilog.Документ5 страницImage Processing To Manipulate RGB Values Using Verilog.Ashutosh LembheОценок пока нет
- Lab 3 Adventure GameДокумент7 страницLab 3 Adventure Gamevirjog100% (1)
- Digital 16 Marks.Документ4 страницыDigital 16 Marks.Saranya PrabhuОценок пока нет
- PRBS GeneratorДокумент9 страницPRBS GeneratorrafieeeОценок пока нет
- 8259 Programmable Interrupt Controller PDFДокумент4 страницы8259 Programmable Interrupt Controller PDFsankukvОценок пока нет
- National University of Singapore Drill Problem Set 1Документ3 страницыNational University of Singapore Drill Problem Set 1Gyan KirtiОценок пока нет
- M. Tech Project on FIR Filter Based on DQ4:2C Mixed MultipliersДокумент24 страницыM. Tech Project on FIR Filter Based on DQ4:2C Mixed MultipliersKushal MalhotraОценок пока нет
- Diff AnsДокумент5 страницDiff AnsOnkar MulayОценок пока нет
- Pulse Code Modulation and Differential Pulse Code ModulationДокумент4 страницыPulse Code Modulation and Differential Pulse Code ModulationSanaullah KhanОценок пока нет
- Summary of The Types of FlipДокумент1 страницаSummary of The Types of FlipPola RismaОценок пока нет
- Verilog Scheduling SemanticsДокумент14 страницVerilog Scheduling SemanticsJayesh PopatОценок пока нет
- Digital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AДокумент19 страницDigital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AKavya ChoudharyОценок пока нет
- Frequency Divider D-Flip-flopsДокумент12 страницFrequency Divider D-Flip-flopsSylvester Delali Dordzi0% (1)
- Ee225 Lab 2Документ10 страницEe225 Lab 2Sherlin Chand100% (1)
- Lab#7 Block Diagram Reduction and Analysis and Design of Feedback SystemsДокумент19 страницLab#7 Block Diagram Reduction and Analysis and Design of Feedback SystemsHammad SattiОценок пока нет
- Ecl 203 MCQДокумент3 страницыEcl 203 MCQresham k vОценок пока нет
- HDL Manual 2019 5th Sem E&CE 17ECL58Документ77 страницHDL Manual 2019 5th Sem E&CE 17ECL58vishvakirana100% (1)
- Exercises For Chapter 2Документ1 страницаExercises For Chapter 2Khổng Xuân TrungОценок пока нет
- Lec 7 SOP and POS Expressions Their Conversion and RepresentationДокумент31 страницаLec 7 SOP and POS Expressions Their Conversion and Representationmuhammad saeedОценок пока нет
- IEEE 13 Node Test FeederДокумент11 страницIEEE 13 Node Test FeederSebastián HernandezОценок пока нет
- Modelling & Simulation of BJT Device ModelsДокумент29 страницModelling & Simulation of BJT Device ModelsvanithapremkumarОценок пока нет
- 2's Complement VHDL Code Using Structrucral ModelingДокумент2 страницы2's Complement VHDL Code Using Structrucral ModelingOP2RОценок пока нет
- Problem: Logic Pyramid: Sno. Input OutputДокумент28 страницProblem: Logic Pyramid: Sno. Input OutputANIRUDDHA PAULОценок пока нет
- Programming The MCU 8051 PDFДокумент48 страницProgramming The MCU 8051 PDFDK White LionОценок пока нет
- 16-BIT MICROPROCESSOR ADDITION, SUBTRACTION, MULTIPLICATION AND DIVISIONДокумент140 страниц16-BIT MICROPROCESSOR ADDITION, SUBTRACTION, MULTIPLICATION AND DIVISIONJaganОценок пока нет
- 02-3-Sequential Logic Synthesis With VHDLДокумент18 страниц02-3-Sequential Logic Synthesis With VHDLEdward ConalОценок пока нет
- Practise Problems For Sequential CircuitsДокумент11 страницPractise Problems For Sequential CircuitsVaibhav KolseОценок пока нет
- ECE3073 Computer Systems Practice Questions Program Design and Analysis: Assembler and LinkingДокумент1 страницаECE3073 Computer Systems Practice Questions Program Design and Analysis: Assembler and LinkingkewancamОценок пока нет
- Ax25 CRCДокумент6 страницAx25 CRCAmaru FloresОценок пока нет
- Chap 05 HMWK SolДокумент72 страницыChap 05 HMWK Solapi-3841575Оценок пока нет
- 12 Computer Science SP 01Документ12 страниц12 Computer Science SP 01varaprasadpgtitjnvОценок пока нет
- Class 7Документ24 страницыClass 7karthikОценок пока нет
- Vlsi Implementation For High Speed AddersДокумент6 страницVlsi Implementation For High Speed AddersPardha Saradhi Damarla100% (1)
- Beee Question BankДокумент4 страницыBeee Question BankmathavanОценок пока нет
- HDL Manual 2020 5th Sem E&CE 18ECL58Документ74 страницыHDL Manual 2020 5th Sem E&CE 18ECL58vishvakiranaОценок пока нет
- UNIt 1 - ARRAY - Class - Notes - PPTДокумент34 страницыUNIt 1 - ARRAY - Class - Notes - PPTMohd arman100% (1)
- NIT Rourkela MTech Exam Questions on Image ProcessingДокумент3 страницыNIT Rourkela MTech Exam Questions on Image ProcessingAyusna SubudhiОценок пока нет
- Analysis of A Three Phase Power System by Using Simpower System Blockset of MatlabДокумент4 страницыAnalysis of A Three Phase Power System by Using Simpower System Blockset of MatlabAnonymous 2mCCeBfKgОценок пока нет
- 3 - KV VHDL P1aДокумент7 страниц3 - KV VHDL P1aChandreshSinghОценок пока нет
- Stucor CS3351-GKДокумент269 страницStucor CS3351-GKNightdive StudiosОценок пока нет
- Compsci Topic 7 Assessment TestДокумент8 страницCompsci Topic 7 Assessment Testbold bananaОценок пока нет
- VHDL Code For CounterДокумент1 страницаVHDL Code For Countermnpaliwal020Оценок пока нет
- Dip Manual PDFДокумент60 страницDip Manual PDFHaseeb MughalОценок пока нет
- DSP Practical FileДокумент18 страницDSP Practical FileDivyaОценок пока нет
- 12 - Operational AmplifiersДокумент27 страниц12 - Operational Amplifierssgw67Оценок пока нет
- Exercise 1Документ3 страницыExercise 1Kaka Hiếu100% (1)
- Device Modelling and Simulation of Logic Gates using NGSPICEДокумент11 страницDevice Modelling and Simulation of Logic Gates using NGSPICEBT19ECE067 MiteshОценок пока нет
- Lab Session 2: Mathematical Modeling and Solving Differential Equations in MATLABДокумент36 страницLab Session 2: Mathematical Modeling and Solving Differential Equations in MATLABmuhammadОценок пока нет
- Hardwired Control Unit: A Case-Study Report Submitted For The Requirement ofДокумент23 страницыHardwired Control Unit: A Case-Study Report Submitted For The Requirement ofShinde D PoojaОценок пока нет
- DMA Controller 8237:: Comparison of 8257 and 8237Документ15 страницDMA Controller 8237:: Comparison of 8257 and 8237SuryaRajitha InpОценок пока нет
- EN315-07 Euler LayoutДокумент43 страницыEN315-07 Euler Layoutpreet786Оценок пока нет
- Up Down CounterДокумент20 страницUp Down Countersumi36117Оценок пока нет
- ECE3073 P4 Bus Interfacing Answers PDFДокумент3 страницыECE3073 P4 Bus Interfacing Answers PDFkewancamОценок пока нет
- Digital ElectronicsДокумент102 страницыDigital Electronicsdurga0% (1)
- Scoa Unit 2 MCQS: Question No Answer Key 1. AДокумент12 страницScoa Unit 2 MCQS: Question No Answer Key 1. AteciОценок пока нет
- Adc0808 and 8253Документ35 страницAdc0808 and 8253Avanish NiranjanОценок пока нет
- OutputДокумент14 страницOutputSaida LaifaОценок пока нет
- Image Processing TechniquesДокумент22 страницыImage Processing TechniquesBabasrinivas GuduruОценок пока нет
- Philips BTM2280Документ30 страницPhilips BTM2280boroda24100% (1)
- B83. AM Single Sideband - AM-SSBДокумент4 страницыB83. AM Single Sideband - AM-SSBaan armanОценок пока нет
- Frequency Response and Bode Plot AnalysisДокумент30 страницFrequency Response and Bode Plot AnalysisSatya SuryaОценок пока нет
- Analog Circuits and Systems: Prof. K Radhakrishna Rao Introduction To Sensors, Signals and SystemsДокумент35 страницAnalog Circuits and Systems: Prof. K Radhakrishna Rao Introduction To Sensors, Signals and Systemsvivek jОценок пока нет
- DigiTech Element Element XP Manual-25Документ1 страницаDigiTech Element Element XP Manual-25CaPitalОценок пока нет
- Getting Into The DetailsДокумент683 страницыGetting Into The DetailsnifnifnafnafОценок пока нет
- Introduction To The 6 Basic Audio MeasurementsДокумент12 страницIntroduction To The 6 Basic Audio MeasurementsZoeloe_2Оценок пока нет
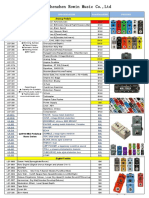
- Shenzhen Rowin Music Co.,Ltd: Analog PedalsДокумент2 страницыShenzhen Rowin Music Co.,Ltd: Analog PedalsJoão PauloОценок пока нет
- LRX 1.400 Service ManualДокумент82 страницыLRX 1.400 Service Manualqu4ttro0% (2)
- STATISTICAL SIGNAL PROCESSING ASSIGNMENT DUE 09.12.2011Документ2 страницыSTATISTICAL SIGNAL PROCESSING ASSIGNMENT DUE 09.12.2011Vadivelan AdaikkappanОценок пока нет
- Convert Phase Noise To JitterДокумент10 страницConvert Phase Noise To JitterBo LuОценок пока нет
- Pt2253a (v2Документ15 страницPt2253a (v2vetchboy100% (1)
- 2RC FilterДокумент14 страниц2RC FilterluanleОценок пока нет
- USER MANUAL Wharferdale Evp-X15pДокумент8 страницUSER MANUAL Wharferdale Evp-X15pBlanca PantojaОценок пока нет
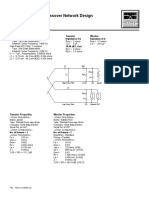
- Custom Two-Way Crossover Network DesignДокумент3 страницыCustom Two-Way Crossover Network DesignAdrian AngkaОценок пока нет
- Sennheiser E855 - ProductSheetДокумент1 страницаSennheiser E855 - ProductSheetJavier RubioОценок пока нет
- KNR 1063 Digital Electronics: CountersДокумент33 страницыKNR 1063 Digital Electronics: CountersCyprian Mikael CorgedoОценок пока нет
- Transmission ImpairmentДокумент21 страницаTransmission Impairmentandyrobin058Оценок пока нет
- EE-354 Analog Communication SystemsДокумент8 страницEE-354 Analog Communication Systemsishac kayaОценок пока нет
- Time Scope Measurements - MATLAB & Simulink Example - MathWorks IndiaДокумент8 страницTime Scope Measurements - MATLAB & Simulink Example - MathWorks IndiaPasupuleti SivakumarОценок пока нет
- Complete Report of Final Year ProjectДокумент39 страницComplete Report of Final Year ProjectAnirban DasguptaОценок пока нет
- Evolution of Music Players - Group 2 MusicДокумент17 страницEvolution of Music Players - Group 2 MusicLinda AgmataОценок пока нет
- BTSE-16FX - Accutronics DIGITAL SOUND EFFECTORДокумент4 страницыBTSE-16FX - Accutronics DIGITAL SOUND EFFECTORNavarro Andrés JorgeОценок пока нет
- Experiment 1 AIM: To Study The Frequency Response of RC Coupled Amplifier at Low and High Frequency ApparatusДокумент7 страницExperiment 1 AIM: To Study The Frequency Response of RC Coupled Amplifier at Low and High Frequency ApparatusPratik AgrawalОценок пока нет
- Noise and Noise Measurements - RF CafeДокумент23 страницыNoise and Noise Measurements - RF Cafeyurivol08Оценок пока нет
- BD-2 Blues Driver ModificationsДокумент1 страницаBD-2 Blues Driver ModificationsNОценок пока нет
- Revista de Geodezie Cartografie Si Cadastru Volumul 16 Numerele 1 2 2007 PDFДокумент114 страницRevista de Geodezie Cartografie Si Cadastru Volumul 16 Numerele 1 2 2007 PDFGheorghe SavaОценок пока нет
- VTU DSP Lab Manual 5th Sem E C Matlab Programs and CCS Studio ProgramsДокумент35 страницVTU DSP Lab Manual 5th Sem E C Matlab Programs and CCS Studio ProgramsSundaram NatarajanОценок пока нет
- Brain Tumor Detection Using MLДокумент9 страницBrain Tumor Detection Using MLRayban PolarОценок пока нет
- Image Processing MatlabДокумент88 страницImage Processing Matlabrraa1865Оценок пока нет
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusОт EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusРейтинг: 4.5 из 5 звезд4.5/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsОт EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsРейтинг: 5 из 5 звезд5/5 (2)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenОт EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenОценок пока нет
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeОт EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeРейтинг: 4 из 5 звезд4/5 (2)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingОт EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingРейтинг: 4.5 из 5 звезд4.5/5 (21)
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormОт EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormРейтинг: 5 из 5 звезд5/5 (5)
- Mental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)От EverandMental Math: How to Develop a Mind for Numbers, Rapid Calculations and Creative Math Tricks (Including Special Speed Math for SAT, GMAT and GRE Students)Оценок пока нет
- Psychology Behind Mathematics - The Comprehensive GuideОт EverandPsychology Behind Mathematics - The Comprehensive GuideОценок пока нет
- A Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathОт EverandA Guide to Success with Math: An Interactive Approach to Understanding and Teaching Orton Gillingham MathРейтинг: 5 из 5 звезд5/5 (1)
- Mental Math Secrets - How To Be a Human CalculatorОт EverandMental Math Secrets - How To Be a Human CalculatorРейтинг: 5 из 5 звезд5/5 (3)
- Fluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldОт EverandFluent in 3 Months: How Anyone at Any Age Can Learn to Speak Any Language from Anywhere in the WorldРейтинг: 3 из 5 звезд3/5 (79)
- Math Magic: How To Master Everyday Math ProblemsОт EverandMath Magic: How To Master Everyday Math ProblemsРейтинг: 3.5 из 5 звезд3.5/5 (15)
- How Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsОт EverandHow Math Explains the World: A Guide to the Power of Numbers, from Car Repair to Modern PhysicsРейтинг: 3.5 из 5 звезд3.5/5 (9)
- Classroom-Ready Number Talks for Kindergarten, First and Second Grade Teachers: 1,000 Interactive Activities and Strategies that Teach Number Sense and Math FactsОт EverandClassroom-Ready Number Talks for Kindergarten, First and Second Grade Teachers: 1,000 Interactive Activities and Strategies that Teach Number Sense and Math FactsОценок пока нет
- Strategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceОт EverandStrategies for Problem Solving: Equip Kids to Solve Math Problems With ConfidenceОценок пока нет
- Build a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.От EverandBuild a Mathematical Mind - Even If You Think You Can't Have One: Become a Pattern Detective. Boost Your Critical and Logical Thinking Skills.Рейтинг: 5 из 5 звезд5/5 (1)
- Limitless Mind: Learn, Lead, and Live Without BarriersОт EverandLimitless Mind: Learn, Lead, and Live Without BarriersРейтинг: 4 из 5 звезд4/5 (6)