Академический Документы
Профессиональный Документы
Культура Документы
E5 03
Загружено:
Roger GarciaОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
E5 03
Загружено:
Roger GarciaАвторское право:
Доступные форматы
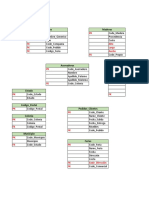
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
PROGRAMA SISTEMAS DINÁMICOS
Presentado por :
ALEXANDER DE ARMAS ROBLES COD: 12447197
LUIS FERNANDO BUSTAMANTE COD: 1143944649
ROGER ALBERTO GARCIA COD: 5135166
GRUPO:
243005_3
Tutor:
ADRIANA DEL PILAR NOGUERA
FASE DE LA ESTRATEGIA:
Etapa 5: Desarrollar la simulación final del sistema dinámico
Cartagena de indias, Colombia 24 de Mayo de 2018
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 1/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
TABLA DE CONTENIDO
INTRODUCCION. .................................................................................................................... 3
OBJETIVOS................................................................................................................................. 4
DESARROLLO DE ACTIVIDADES TEORICAS ................................................................ 5
DESARROLLO DEL PROBLEMA ............................................................................................ 6
COMPONENTE TEÓRICO: ....................................................................................................... 8
COMPONENTE PRÁCTICO: ..................................................................................................... 9
FUNCIÓN DE TRANSFERENCIA DEL SISTEMA NO LINEAL ............................................ 9
MODELO ARX SISTEMA NO LINEAL ................................................................................. 10
MODELO ARMAX SISTEMA NO LINEAL ........................................................................... 11
MODELO OUTPUT-ERROR SISTEMA NO LINEAL............................................................ 12
MODELO BOX-JENKINS SISTEMA NO LINEAL ................................................................ 13
GRAFICA DE MODELO IDENT Vs FUNCION DE TRANSFERENCIA ............................ 14
SIMULACION EN SIMULINK ................................................................................................ 15
LINK DE VIDEOS .................................................................................................................... 24
CONCLUSIONES ..................................................................................................................... 25
REFERENCIAS BIBLIOGRAFICAS ................................................................................... 26
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 2/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
INTRODUCCION.
Poder modelar un sistema nos brinda la posibilidad de mejorar sus propiedades
o características, lo cual se convierte en una herramienta esencial para los
sistemas automatizados en la industria. Este conocimiento es parte
fundamental en nuestro saber, pues nos da la posibilidad de ser mejores
profesionales y tomar las mejores decisiones al momento de automatizar un
sistema.
A través del desarrollo de este informe teórico se pretende adquirir los
conocimientos o competencias prácticas para conseguir los modelos
matemáticos de los datos obtenidos de manera experimental y de esta forma
encontrar el modelo matemático que representan el comportamiento del
sistema dinámico más adecuado utilizando la herramienta IDENT de MatLab.
Comúnmente encontramos en la industria, muchos procesos que nos arrojan
bastante información de las cuales algunos podemos obtener por las leyes de
la física que rigen dicho proceso; otros son desestimados por nuestro saber.
Es por eso que esta herramienta IDENT de MatLab nos brinda un mundo de
posibilidades al momento de entender o modelar cualquier proceso con solo
medir diferentes valores con respecto al tiempo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 3/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
OBJETIVOS
Encontrar el modelo matemático de un sistema dinámico utilizando
diferentes técnicas de identificación, para su posterior simulación y
validación
Obtener los modelos matemáticos a partir de datos experimentales, a
través del uso de métodos paramétricos y no paramétricos a través de
la herramienta IDENT de Matlab®.
analizar e identificar los modelos matemáticos hallados en ident de
Matlab®.
Aplicar los conocimientos adquiridos para analizar y comprender la
herramienta de ident de Matlab®..
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 4/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
DESARROLLO DE ACTIVIDADES TEORICAS
DESCRIPCIÓN DEL PROBLEMA:
La compañía donde usted trabaja ha realizado la adquisición de un nuevo
equipo industrial que permitirá incrementar los niveles de producción de la
empresa. Con el fin de prevenir fallas y proteger la alta inversión realizada, el
presidente de la compañía ha ordenado la creación de un sistema de monitoreo
que permita supervisar el buen funcionamiento de la máquina y diagnosticar
la existencia de alguna falla. Para el diseño del sistema de monitoreo y
diagnóstico de fallas se requiere conocer de forma precisa el modelo
matemático del equipo industrial; de esta manera se dice que la máquina
está funcionando correctamente si la salida real es similar a la salida de su
modelo matemático; en caso contrario es posible que la máquina esté
presentando fallas.
A continuación, se presenta un diagrama simplificado del nuevo equipo
industrial, en el cual se tiene como:
Variable de entrada el voltaje de armadura del motor aplicada 𝑣(𝑡)
variable de salida la velocidad de rotación del motor 𝛩(𝑡):
Figura 1
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 5/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
DESARROLLO DEL PROBLEMA
MARCO TEÓRICO.
El motor de corriente continua (denominado también motor de corriente
directa, motor CC o motor DC por las iniciales en inglés direct current) es una
máquina que convierte energía eléctrica en mecánica, provocando un
movimiento rotatorio, gracias a la acción de un campo magnético.
Un motor de corriente continua se compone principalmente de dos partes.
1. El estator da soporte mecánico al aparato y contiene los polos de la
máquina, que pueden ser o bien devanados de hilo de cobre sobre un
núcleo de hierro, o imanes permanentes.
2. El rotor es generalmente de forma cilíndrica, también devanado y con
núcleo, alimentado con corriente directa a través de delgas, que están
en contacto alternante con escobillas fijas
El principio de funcionamiento de los motores eléctricos de corriente directa o
continua se basa en la repulsión que ejercen los polos magnéticos formados
entre el campo (estator) y la armadura (rotor), cuando, de acuerdo con la Ley
de Lorentz, interactúan con los polos magnéticos de los electroimanes o
bobinas. que se encuentra montado en un eje. (Rotor)el cual le permite girar
libremente entre los polos magnéticos norte y sur del Campo situado dentro
de la carcasa o cuerpo del motor.
1.- Carcasa
2.- Núcleo Polar
3.- Polo
4.- Polo Auxiliar
6.- Armadura o Inducido
7.- Bobinas del Inducido
8.- Bobina de Campo
9.- Bobina Auxiliar
10.- Colector o Delgas
11-12.- Escobillas
13 patas de anclaje
Cuando la corriente eléctrica circula por las bobinas del motor genera un
campo magnético el cual si los polos magnéticos coinciden, se producirá un
rechazo entre los polos magnéticos y este a su vez un torque o par de fuerza
que provocará que el rotor rompa la inercia y comience a girar sobre su eje en
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 6/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
el mismo sentido de las manecillas del reloj en unos casos, o en sentido
contrario, de acuerdo con la forma que se encuentre conectada a la fuente de
energía eléctrica.
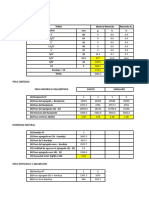
Para el desarrollo del problema planteado se asumirán los siguientes valores
para los parámetros físicos a saber:
(𝐽) Momento de inercia del rotor: 0.01 𝑘𝑔 ∗ 𝑚2
(𝑏) Constante de fricción viscosa del motor: 1𝑁∗𝑚∗𝑠
0.01𝑉
(𝐾𝑏 ) Constante de fuerza electromotriz (𝑘𝑒) 𝑟𝑎𝑑
/𝑠𝑒𝑔
(𝐾𝑡 ) Constante torque del motor: 0.01 𝑁 ∗ 𝑚/𝐴
(𝑅) Resistencia eléctrica: 1Ω
(𝐿) Inductancia: 0.5𝐻
De igual manera, para la solución del problema suponemos que:
La entrada del sistema es la fuente de voltaje (𝑉) aplicado a la
armadura del motor,
la salida del sistema es la posición del eje (𝜃).
Se supone que el rotor y el eje son rígidos.
Suponemos además un modelo de fricción viscosa, es decir, el par de
fricción es proporcional a la velocidad angular del eje.
Supondremos que el campo magnético en el motor es constante
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 7/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
COMPONENTE TEÓRICO:
Realice un análisis de cuál modelo seleccionaría su grupo para ser utilizado en
el sistema de monitoreo y diagnóstico de fallas. Tenga en cuenta el
compromiso entre precisión del modelo frente a simplicidad del mismo.
Según lo ensayado en el módulo IDENT de MATLAB, yo sugiero el sistema lineal
con el modelo Box-Jenkins para ser utilizado en el sistema de monitoreo y
diagnóstico de fallas para el control del motor DC, el cual me arroja una
aproximación del 93.1% con relación a la entrada Vs la salida del sistema.
Mantiene un margen de precisión alto y su sistema es simple, pues solo tiene
2 polos y 1 cero.
Se puede aumentar el margen de precisión en un 1.2% por encima del modelo
Box-Jenkins pero eso implicaría aumentar 1 polo más, con lo cual se
aumentaría la precisión, pero también aumentaría la complejidad del sistema.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 8/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
COMPONENTE PRÁCTICO:
1. Utilice MATLAB® para aplicar a la ecuación diferencial no lineal encontrada
en la Etapa 1, a la función de transferencia encontrada en la Etapa 2 y a los
modelos ARX, ARMAX, Output-Error y Box-Jenkins identificados en la Etapa
3, una señal de entrada de prueba suministrada por el docente, y simule
los diferentes sistemas. (En caso de no haber cumplido con estos objetivos
el docente suministrará los modelos).
2. Analice la respuestas obtenidas y compare la salida de cada modelo con la
salida que se obtiene del proceso real ante la misma entrada, con el fin de
validar y seleccionar el modelo más preciso.
FUNCIÓN DE TRANSFERENCIA DEL SISTEMA NO LINEAL
0.7131𝑠 + 0.03511
𝐹𝑇 =
𝑠2 + 9.069𝑠 + 0.4488
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 9/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
MODELO ARX SISTEMA NO LINEAL
Diagrama de bloque Modelo ARX
𝐵(𝑞) 1
𝑦(𝑡) = 𝑢(𝑡) + 𝑒(𝑡)
𝐴(𝑞) 𝐴(𝑞)
Ecuación modelo ARX
Donde:
𝐵(𝑞) = 0.02001𝑞 −1 ; 𝐴(𝑞) = 1 − 0.4863𝑞 −1 − 0.4149𝑞 −2 ; 𝑒(𝑡) = 0
𝑝𝑜𝑙𝑜𝑠: 𝑛𝑎 = 2 ; 𝐶𝑒𝑟𝑜𝑠 𝑛𝑏 = 1; 𝑟𝑒𝑡𝑟𝑎𝑠𝑜 𝑛𝑘 = 1
Reemplazamos los valores tenemos:
0.02001𝑞 −1 1
𝑦(𝑡) = −1 −2
+ ∗ 0(𝑡)
1 − 0.4863𝑞 − 0.4149𝑞 1 − 0.4863𝑞 − 0.4149𝑞 −2
−1
0.02001𝑞 −1
𝑦(𝑡) =
1 − 0.4863𝑞 −1 − 0.4149𝑞 −2
Para tener exponentes positivos se multiplica todo por 𝑞 2
0.02001𝑞
𝑦(𝑡) =
𝑞2 − 0.4863𝑞 − 0.4149
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 10/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
MODELO ARMAX SISTEMA NO LINEAL
Diagrama de bloque Modelo ARMAX
𝐵(𝑞) 𝐶(𝑞)
𝑦(𝑡) = 𝑢(𝑡) + 𝑒(𝑡)
𝐴(𝑞) 𝐴(𝑞)
Ecuación modelo ARMAX
Donde:
𝐴(𝑞) = 1 − 0.8267𝑞 −1 − 0.1574𝑞 −2 ; 𝐵(𝑞) = 0.001757𝑞 −1
𝐶(𝑞) = 1 − 0.285𝑞 −1; 𝑒(𝑡) = 0
𝑝𝑜𝑙𝑜𝑠 𝑛𝑎 = 2; 𝐶𝑒𝑟𝑜𝑠 𝑛𝑏 = 1 y 𝑛𝑐 = 1; 𝑅𝑒𝑡𝑟𝑎𝑠𝑜𝑠 𝑛𝑘 = 1
0.001757𝑞 −1 1 − 0.285𝑞 −1
𝑦(𝑡) = + ∗0
1 − 0.8267𝑞 −1 − 0.1574𝑞 −2 1 − 0.8267𝑞 −1 − 0.1574𝑞 −2
0.001757𝑞 −1
𝑦(𝑡) =
1 − 0.8267𝑞 −1 − 0.1574𝑞 −2
Para tener exponentes positivos se multiplica todo por 𝑞 2
0.001757𝑞
𝑦(𝑡) =
𝑞2 − 0.8267𝑞 − 0.1574
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 11/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
MODELO OUTPUT-ERROR SISTEMA NO LINEAL
Diagrama de bloque Modelo OE
𝐵(𝑞)
𝑦(𝑡) = 𝑢(𝑡) + 𝑒(𝑡)
𝐹(𝑞)
Ecuación modelo OE
Donde:
𝐵(𝑞) = 0.002512𝑞 −1; 𝐹(𝑞) = 1 − 0.0009608𝑞 −1 − 0.9763𝑞 −2
𝑟𝑢𝑖𝑑𝑜 𝑒(𝑡) = 0; 𝐶𝑒𝑟𝑜𝑠 𝑛𝑏 = 1; 𝑃𝑜𝑙𝑜𝑠 𝑛𝑓 = 2 ; 𝑅𝑒𝑡𝑟𝑎𝑠𝑜 𝑛𝑘 = 1
0.002512𝑞 −1
𝑦(𝑡) = 𝑢(𝑡) + 0(𝑡)
1 − 0.0009608𝑞 −1 − 0.9763𝑞 −2
0.002512𝑞 −1
𝑦(𝑡) =
1 − 0.0009608𝑞 −1 − 0.9763𝑞 −2
Para tener exponentes positivos se multiplica todo por 𝑞 2
0.002512𝑞
𝑦(𝑡) =
𝑞2 − 0.0009608𝑞 − 0.9763
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 12/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
MODELO BOX-JENKINS SISTEMA NO LINEAL
Diagrama de bloque Modelo BJ
𝐵(𝑞) 𝐶(𝑞)
𝑦(𝑡) = 𝑢(𝑡) + 𝑒(𝑡)
𝐹(𝑞) 𝐷(𝑞)
Ecuación modelo BJ
Donde:
𝐵(𝑞) = 0.01049𝑞 −1
𝐶(𝑞) = 1 − 0.7077𝑞 −1
𝐷(𝑞) = 1 − 0.9611𝑞 −1 + 0.04055𝑞 −2
𝐹(𝑞) = 1 − 0.2188𝑞 −1 − 0.6518𝑞 −2
𝑟𝑢𝑖𝑑𝑜 𝑒(𝑡) = 0
𝐶𝑒𝑟𝑜𝑠 𝑛𝑏 = 1 y 𝑛𝑐 = 1; 𝑃𝑜𝑙𝑜𝑠 𝑛𝑑 = 2 y 𝑛𝑓 = 2; 𝑅𝑒𝑡𝑟𝑎𝑠𝑜 𝑛𝑘 = 1
0.01049𝑞 −1 1 − 0.7077𝑞 −1
𝑦(𝑡) = 𝑢(𝑡) + ∗0
1 − 0.2188𝑞 −1 − 0.6518𝑞 −2 1 − 0.9611𝑞 −1 + 0.04055𝑞 −2
0.01049𝑞 −1
𝑦(𝑡) =
1 − 0.2188𝑞 −1 − 0.6518𝑞 −2
Para tener exponentes positivos se multiplica todo por 𝑞 2
0.01049𝑞
𝑦(𝑡) =
𝑞2 − 0.2188𝑞 − 0.6518
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 13/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
GRAFICA DE MODELO IDENT Vs FUNCION DE TRANSFERENCIA
Como podemos ver el modelo Box-Jenkins es el más aproximado a la función
de transferencia del sistema no lineal, igual que con la función de transferencia
del sistema lineal, mantiene un margen muy próximo a la salida del sistema,
garantizándome un alto margen de control.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 14/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
SIMULACION EN SIMULINK
Amarillo: ARX Azul: ARMAX Naranja: OE Verde: BJ;
Podemos ver que los sistemas dinámicos son de gran ayuda para entender el
comportamiento de un sistema a través de los datos obtenidos en la práctica.
Esta herramienta nos permite entender cualquier comportamiento físico en un
sistema dado, los cual nos brinda muchas posibilidades para poder ejercer
control y también corregir condiciones no deseadas a través de los feedback
que tengamos en el sistema instalados, como sensores de: posición, de giro,
de aceleración o de ubicación.
En este caso se simula el comportamiento de un motor dc con una variable de
entrada que es el voltaje aplicado, el cual dará como respuesta un movimiento
circular en el eje del rotor del motor. Encontrando restricciones como la fricción
entre los rodamientos del rotor, el momento de inercia del rotor, la resistencia
eléctrica en las bobinas del estator y la inductancia producida por el campo
magnético y el entre hierro del motor. Todas estas variables inciden en la
respuesta instantánea del motor teniendo un retardo a la excitación en la
entrada del sistema.
En el caso de la práctica en SIMULINK podemos ver que el modelo Box-Jenkins
es que más se aproxima a la respuesta real del motor y como tal este modelo
sería el más preciso o confiable para realizar un monitoreo o control sobre el
equipo
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 15/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
La grafica que se obtuvo más cercana a la real es la de la ecuación lineal
izada, ya que básicamente es el modelo inicial, sin embargo el trabajar con
una función lineal no nos va a permitir predecir a futuro el comportamiento
del sistema, razón por la cual nos parece más adecuado tomar la función de
transferencia debido a que cumple con las reglas de la matemática eléctrica
y mecánicas el cual hace un barrido del circuito contando con las corrientes
, los componentes y las leyes de corrientes de mallas, voltajes, torque,
fricción, y electromotriz
Este sistema utiliza la matemática de las ecuaciones diferenciales que es un
mecanismo que da más credibilidad porque se basa en cálculos
experimentales; se utiliza y se recomienda el MODELO BOX-JENKINS SISTEMA
LINEAL ya que este el que tiene un comportamiento similar a la señal esperada
esto se da porque tenemos a la facilidad de modelarlo ya que se puede
insertar mas variables BJ
th = bj(z, [nb nc nd nf nk]) dando un porcentaje de Fit to estimation data:
92.3% (simulation focus) lo que hace que se estabilice mejor
3. Analice la respuesta obtenida y compare la salida de cada modelo con la
salida que se obtiene del proceso real ante la misma entrada, con el fin de
validar y seleccionar el modelo más preciso.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 16/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
MODELO ARX SISTEMA NO LINEAL vs MODELO ARX SISTEMA LINEAL
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 17/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
Simulink
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 18/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
MODELO ARMAX SISTEMA NO vs LINEAL MODELO ARMAX SISTEMA LINEAL
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 19/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
simulink
MODELO OUTPUT-ERROR SISTEMA NO vs LINEAL MODELO OUTPUT-ERROR
SISTEMA LINEAL
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 20/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
Simulink
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 21/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
MODELO OUTPUT-ERROR SISTEMA NO LINEAL vs MODELO OUTPUT-ERROR
SISTEMA NO LINEAL
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 22/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
simulink
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 23/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
LINK DE VIDEOS
Alexander de armas.
Luis Fernando Bustamante.
https://www.youtube.com/watch?time_continue=34&v=3YaSx5r65oY
Jorge Mario Moreno.
Roger Alberto Garcia.
https://youtu.be/iML7iKAtTmY
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 24/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
CONCLUSIONES
A través del desarrollo del presente trabajo adquirimos los conocimientos
prácticos de como conseguir el modelo matemático de un proceso mediante
los valores obtenidos de forma experimental, utilizando la herramienta IDENT
de Matlab®.
Entendimos que todo sistema puede ser modelado, siempre que tengamos los
datos del proceso a través del tiempo con la ayuda del software Matlab®.
Estamos muy satisfechos con los conocimientos adquiridos en este módulo de
los cuales podremos aplicar en nuestro entorno laboral y profesional
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 25/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
REFERENCIAS BIBLIOGRAFICAS
Soria, O. E., Martín, G. J. D., & Gómez, C. L. (2004). Teoría de circuitos Cap.
8-9. Madrid, ES: McGraw-Hill España. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=200
&docID=10498623&tm=1481843758253
Pastor, G. A., & Ortega, J. J. (2014). Circuitos eléctricos. Vol. II. Madrid, ES:
UNED - Universidad Nacional de Educación a Distancia. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=29&
docID=10853795&tm=1481844106731
Villegas, L. (2007). Trabajo teórico práctico con Matlab. Buenos Aires, AR: El
Cid Editor - Informática. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=23&
docID=10165756&tm=1481844464476
Pagola, L. L. (2009). Regulación automática. Madrid, ES: Universidad
Pontificia Comillas. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=1&d
ocID=10522924&tm=1481844622214
El, H. N. (2007). Sistemas de control: ganancias de realimentación y
observadores de estado. Buenos Aires, AR: El Cid Editor - Ingeniería.
Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=1&d
ocID=10165708&tm=1481845234080
Roca, C. A. (2014). Control automático de procesos industriales: con
prácticas de simulación y análisis por ordenador PC. Madrid, ES: Ediciones
Díaz de Santos. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=74&
docID=11001962&tm=1481845100526
Gil, R. M. (2003). Introducción rápida a Matlab y Simulink para ciencia e
ingeniería. Madrid, ES: Ediciones Díaz de Santos. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=33&
docID=11059428&tm=1481846504254
Creus, S. A. (2007). Simulación y control de procesos por ordenador (2a.
ed.). Barcelona, ES: Marcombo. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?ppg=45&
docID=10212445&tm=1481848330059
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 26/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Escuela de ciencias básicas tecnologías e Ingeniería
PROGRAMA: SISTEMAS DINAMICOS
Amaya Diaz, J. ( 17,12,2016). Identificación de sistemas. [Archivo de video].
Recuperado de http://hdl.handle.net/10596/10872
Creus, S. A. (2007). Simulación y control de procesos por ordenador (2a. ed.).
Barcelona, ES: Marcombo. Recuperado de
http://bibliotecavirtual.unad.edu.co:2077/lib/unadsp/reader.action?
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA UNAD – www.unad.edu.co 27/27
PTU: www.unadvirtual.org / Docente diseñador de plantilla: Georffrey Acevedo.
Вам также может понравиться
- Sistema de Postratamiento de Emisiones (EATS) JAPONESДокумент24 страницыSistema de Postratamiento de Emisiones (EATS) JAPONESLuisyxime Luisyxime100% (1)
- Catálogo de Inmuebles Con Valor Histórico y Artístico de La Zona Protegida Barrio Antiguo 2013Документ270 страницCatálogo de Inmuebles Con Valor Histórico y Artístico de La Zona Protegida Barrio Antiguo 2013Gobierno de Nuevo LeónОценок пока нет
- TecsupДокумент9 страницTecsupAnthonyОценок пока нет
- 4.1.3.5 Packet Tracer - Configure Standard IPv4 ACLs - ILMДокумент17 страниц4.1.3.5 Packet Tracer - Configure Standard IPv4 ACLs - ILMRoger GarciaОценок пока нет
- Fase3 RogergarciaДокумент13 страницFase3 RogergarciaRoger Garcia100% (1)
- Códigos Roger Garcia Paso4Документ10 страницCódigos Roger Garcia Paso4Roger GarciaОценок пока нет
- 5.2.1.7 Packet Tracer - Examine The ARP Table Instructions IGДокумент15 страниц5.2.1.7 Packet Tracer - Examine The ARP Table Instructions IGRoger GarciaОценок пока нет
- Aplicaciones de Fenómenos ÓpticosДокумент4 страницыAplicaciones de Fenómenos ÓpticosIván HerreraОценок пока нет
- Análisis Dinámico Por Métodos NuméricosДокумент13 страницAnálisis Dinámico Por Métodos NuméricosOscar MartinezОценок пока нет
- Cubierta de Vidrio Templado + Estr. MetálicaДокумент2 страницыCubierta de Vidrio Templado + Estr. Metálicacarmen eliana azurin salasОценок пока нет
- Resolución Problemas Pérdidas.Документ15 страницResolución Problemas Pérdidas.Joe ToazaОценок пока нет
- Ejercicios de Estadistica en ExcelДокумент7 страницEjercicios de Estadistica en ExcelLitz Norma TFОценок пока нет
- Normalización FN2Документ2 страницыNormalización FN2Peña FielОценок пока нет
- Proceso de Mecanizado Copa de VinoДокумент5 страницProceso de Mecanizado Copa de VinoJose Manuel Campos OrtegaОценок пока нет
- Cristalizacion CuSO4 BДокумент5 страницCristalizacion CuSO4 BJorgeMartinОценок пока нет
- Generalidades de La Investigación de OperacionesДокумент9 страницGeneralidades de La Investigación de OperacionesTatan MezaОценок пока нет
- Presentación Interna Ayt-1 Sem128 Rev-1 30-Mar-2021Документ14 страницPresentación Interna Ayt-1 Sem128 Rev-1 30-Mar-2021candelario de la cruzОценок пока нет
- Ejemplo PDFДокумент12 страницEjemplo PDFPriscilla TeОценок пока нет
- DeadlockДокумент3 страницыDeadlockjoss_majoОценок пока нет
- Interruptores TermomagneticosДокумент3 страницыInterruptores TermomagneticosJOSE MIGUELОценок пока нет
- Analisis de Agregados para ConcretoДокумент20 страницAnalisis de Agregados para Concretoarturo mauro andrade arceОценок пока нет
- Resumen GaserosДокумент22 страницыResumen Gaserosclaudia salasОценок пока нет
- Energía Geotérmica y BiocombustibleДокумент17 страницEnergía Geotérmica y BiocombustibleUriel Alfonso Cruz CabanzoОценок пока нет
- Análisis de Costos Unitarios RiegoДокумент78 страницAnálisis de Costos Unitarios RiegoNolber Sanchez100% (1)
- Analisis Funcional de CSVДокумент36 страницAnalisis Funcional de CSVEduardo PintoОценок пока нет
- Destilacion Molecular CentrifugaДокумент5 страницDestilacion Molecular CentrifugaGema CedeñoОценок пока нет
- Folleto Gestion de Iluminacion Digital DLM LegrandДокумент10 страницFolleto Gestion de Iluminacion Digital DLM LegrandjumancesuОценок пока нет
- Materiales PétreosДокумент18 страницMateriales PétreosCristhiam Irasel Sequeira AmadorОценок пока нет
- Procedimiento para La Aplicación de Ensayos No Destructivos: Líquidos PenetrantesДокумент15 страницProcedimiento para La Aplicación de Ensayos No Destructivos: Líquidos PenetrantesJesus Ysidro IsidroОценок пока нет
- Relacion de InsumosДокумент1 страницаRelacion de InsumosAngelita Galvez CanoОценок пока нет
- El TacometroДокумент3 страницыEl TacometroNerio Hugo Morera MaqueraОценок пока нет
- Transiciones y Curvas en Regimen SubcriticoДокумент2 страницыTransiciones y Curvas en Regimen SubcriticoJhonatan Garcia PerezОценок пока нет
- PMT - Est - Boyaca - RedesДокумент109 страницPMT - Est - Boyaca - RedesANGELO ESTUPI?AN BORDAОценок пока нет
- Imc4011 - D - Puesta en Marcha Del Elevador Hailo y Línea de Vida Avanti Delta4000Документ35 страницImc4011 - D - Puesta en Marcha Del Elevador Hailo y Línea de Vida Avanti Delta4000escarlet cortesОценок пока нет